 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSATac: A Thermoluminescence Enabled Tactile Sensor for Concurrent Perception of Temperature, Pressure, and Shear
Feb 01, 2024
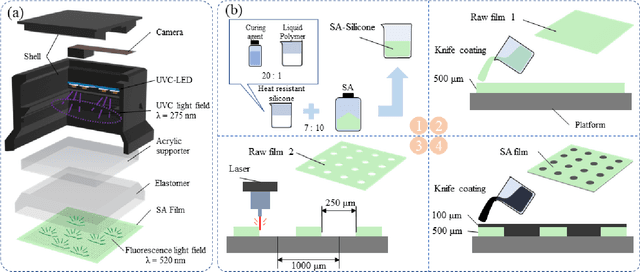


Most vision-based tactile sensors use elastomer deformation to infer tactile information, which can not sense some modalities, like temperature. As an important part of human tactile perception, temperature sensing can help robots better interact with the environment. In this work, we propose a novel multimodal vision-based tactile sensor, SATac, which can simultaneously perceive information of temperature, pressure, and shear. SATac utilizes thermoluminescence of strontium aluminate (SA) to sense a wide range of temperatures with exceptional resolution. Additionally, the pressure and shear can also be perceived by analyzing Voronoi diagram. A series of experiments are conducted to verify the performance of our proposed sensor. We also discuss the possible application scenarios and demonstrate how SATac could benefit robot perception capabilities.
WSTac: Interactive Surface Perception based on Whisker-Inspired and Self-Illuminated Vision-Based Tactile Sensor
Aug 25, 2023



Modern Visual-Based Tactile Sensors (VBTSs) use cost-effective cameras to track elastomer deformation, but struggle with ambient light interference. Solutions typically involve using internal LEDs and blocking external light, thus adding complexity. Creating a VBTS resistant to ambient light with just a camera and an elastomer remains a challenge. In this work, we introduce WStac, a self-illuminating VBTS comprising a mechanoluminescence (ML) whisker elastomer, camera, and 3D printed parts. The ML whisker elastomer, inspired by the touch sensitivity of vibrissae, offers both light isolation and high ML intensity under stress, thereby removing the necessity for additional LED modules. With the incorporation of machine learning, the sensor effectively utilizes the dynamic contact variations of 25 whiskers to successfully perform tasks like speed regression, directional identification, and texture classification. Videos are available at: https://sites.google.com/view/wstac/.