 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAVR: Active Vision-Driven Robotic Precision Manipulation with Viewpoint and Focal Length Optimization
Mar 03, 2025Robotic manipulation within dynamic environments presents challenges to precise control and adaptability. Traditional fixed-view camera systems face challenges adapting to change viewpoints and scale variations, limiting perception and manipulation precision. To tackle these issues, we propose the Active Vision-driven Robotic (AVR) framework, a teleoperation hardware solution that supports dynamic viewpoint and dynamic focal length adjustments to continuously center targets and maintain optimal scale, accompanied by a corresponding algorithm that effectively enhances the success rates of various operational tasks. Using the RoboTwin platform with a real-time image processing plugin, AVR framework improves task success rates by 5%-16% on five manipulation tasks. Physical deployment on a dual-arm system demonstrates in collaborative tasks and 36% precision in screwdriver insertion, outperforming baselines by over 25%. Experimental results confirm that AVR framework enhances environmental perception, manipulation repeatability (40% $\le $1 cm error), and robustness in complex scenarios, paving the way for future robotic precision manipulation methods in the pursuit of human-level robot dexterity and precision.
Bayesian Nonparametric Dictionary Learning for Compressed Sensing MRI
Jul 26, 2014
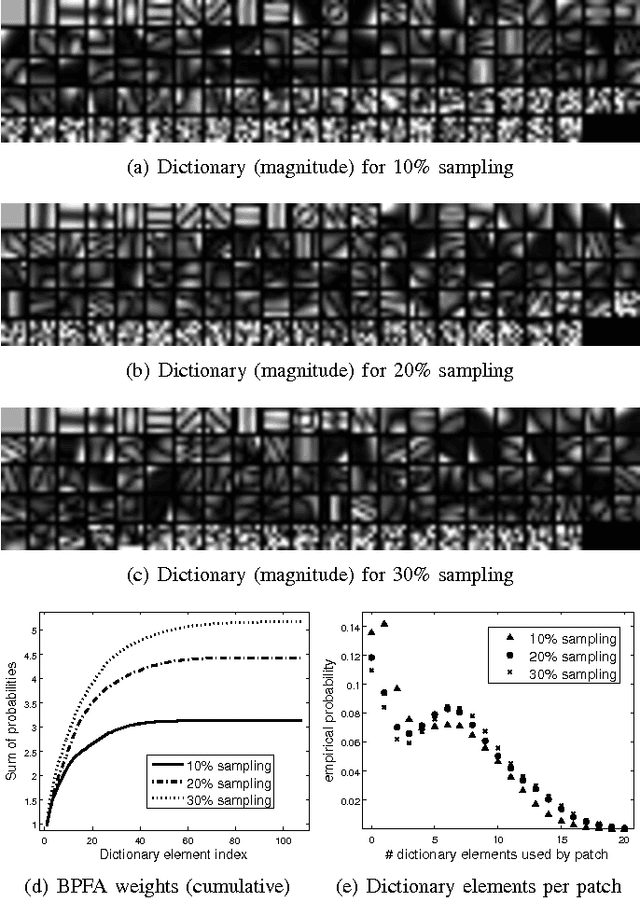

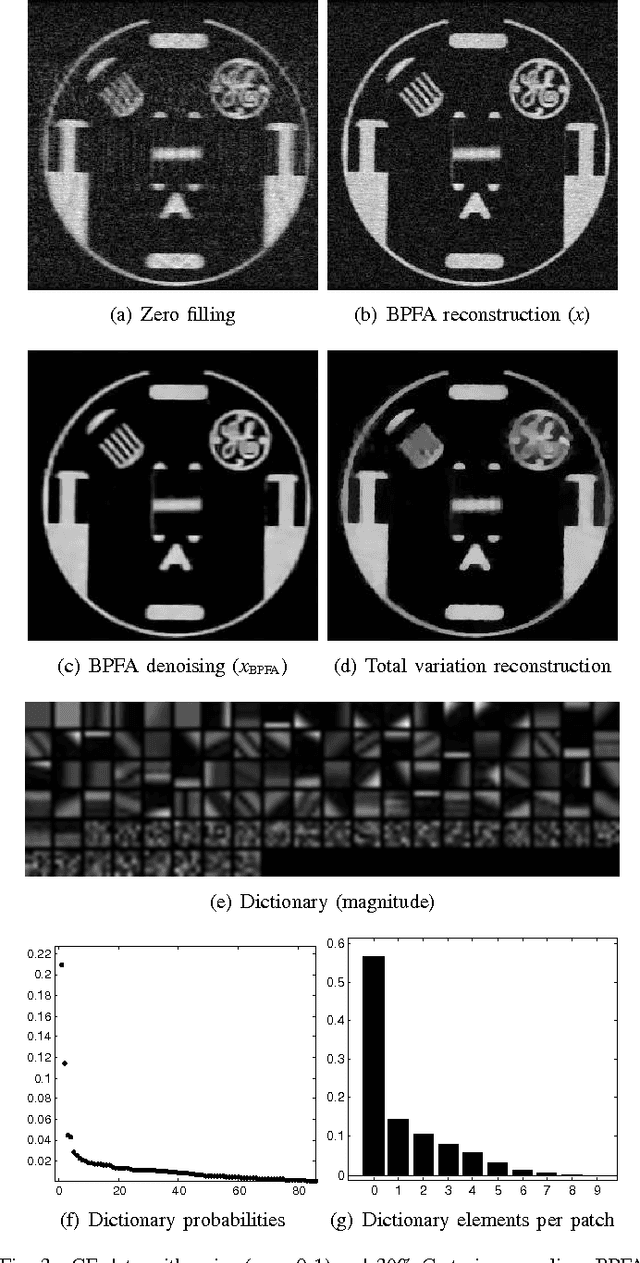
We develop a Bayesian nonparametric model for reconstructing magnetic resonance images (MRI) from highly undersampled k-space data. We perform dictionary learning as part of the image reconstruction process. To this end, we use the beta process as a nonparametric dictionary learning prior for representing an image patch as a sparse combination of dictionary elements. The size of the dictionary and the patch-specific sparsity pattern are inferred from the data, in addition to other dictionary learning variables. Dictionary learning is performed directly on the compressed image, and so is tailored to the MRI being considered. In addition, we investigate a total variation penalty term in combination with the dictionary learning model, and show how the denoising property of dictionary learning removes dependence on regularization parameters in the noisy setting. We derive a stochastic optimization algorithm based on Markov Chain Monte Carlo (MCMC) for the Bayesian model, and use the alternating direction method of multipliers (ADMM) for efficiently performing total variation minimization. We present empirical results on several MRI, which show that the proposed regularization framework can improve reconstruction accuracy over other methods.