 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransforming the Hybrid Cloud for Emerging AI Workloads
Nov 20, 2024



This white paper, developed through close collaboration between IBM Research and UIUC researchers within the IIDAI Institute, envisions transforming hybrid cloud systems to meet the growing complexity of AI workloads through innovative, full-stack co-design approaches, emphasizing usability, manageability, affordability, adaptability, efficiency, and scalability. By integrating cutting-edge technologies such as generative and agentic AI, cross-layer automation and optimization, unified control plane, and composable and adaptive system architecture, the proposed framework addresses critical challenges in energy efficiency, performance, and cost-effectiveness. Incorporating quantum computing as it matures will enable quantum-accelerated simulations for materials science, climate modeling, and other high-impact domains. Collaborative efforts between academia and industry are central to this vision, driving advancements in foundation models for material design and climate solutions, scalable multimodal data processing, and enhanced physics-based AI emulators for applications like weather forecasting and carbon sequestration. Research priorities include advancing AI agentic systems, LLM as an Abstraction (LLMaaA), AI model optimization and unified abstractions across heterogeneous infrastructure, end-to-end edge-cloud transformation, efficient programming model, middleware and platform, secure infrastructure, application-adaptive cloud systems, and new quantum-classical collaborative workflows. These ideas and solutions encompass both theoretical and practical research questions, requiring coordinated input and support from the research community. This joint initiative aims to establish hybrid clouds as secure, efficient, and sustainable platforms, fostering breakthroughs in AI-driven applications and scientific discovery across academia, industry, and society.
Towards Energy-Efficiency by Navigating the Trilemma of Energy, Latency, and Accuracy
Sep 06, 2024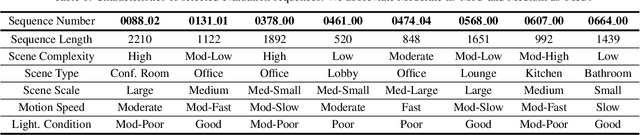
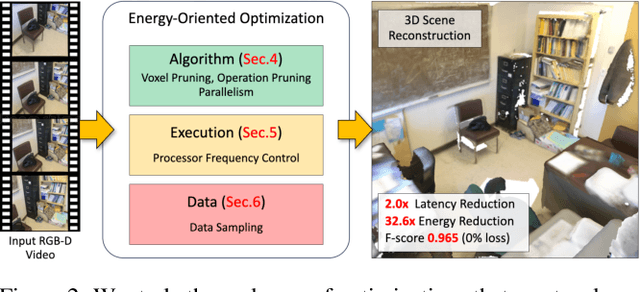
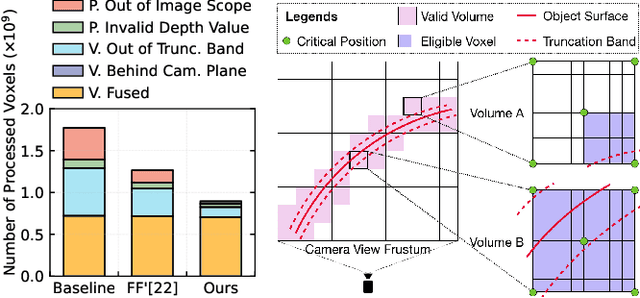
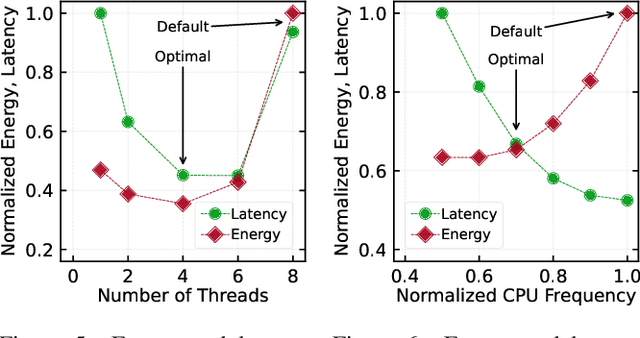
Extended Reality (XR) enables immersive experiences through untethered headsets but suffers from stringent battery and resource constraints. Energy-efficient design is crucial to ensure both longevity and high performance in XR devices. However, latency and accuracy are often prioritized over energy, leading to a gap in achieving energy efficiency. This paper examines scene reconstruction, a key building block for immersive XR experiences, and demonstrates how energy efficiency can be achieved by navigating the trilemma of energy, latency, and accuracy. We explore three classes of energy-oriented optimizations, covering the algorithm, execution, and data, that reveal a broad design space through configurable parameters. Our resulting 72 designs expose a wide range of latency and energy trade-offs, with a smaller range of accuracy loss. We identify a Pareto-optimal curve and show that the designs on the curve are achievable only through synergistic co-optimization of all three optimization classes and by considering the latency and accuracy needs of downstream scene reconstruction consumers. Our analysis covering various use cases and measurements on an embedded class system shows that, relative to the baseline, our designs offer energy benefits of up to 60X with potential latency range of 4X slowdown to 2X speedup. Detailed exploration of a use case across representative data sequences from ScanNet showed about 25X energy savings with 1.5X latency reduction and negligible reconstruction quality loss.
On-Device CPU Scheduling for Sense-React Systems
Aug 14, 2022
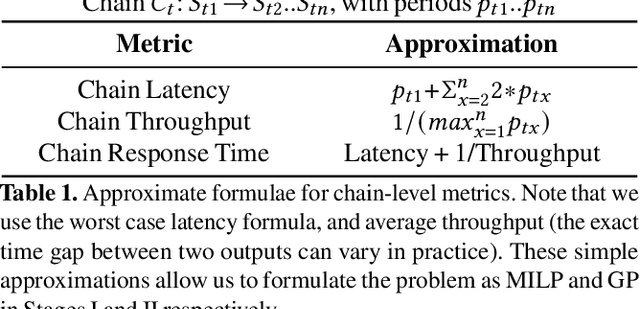
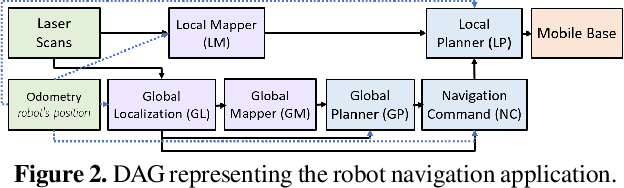
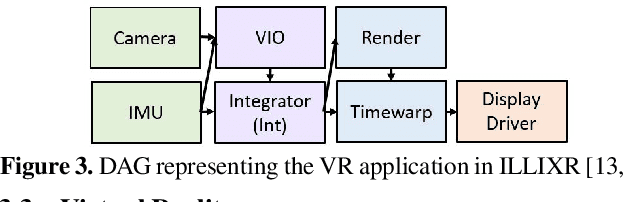
Sense-react systems (e.g. robotics and AR/VR) have to take highly responsive real-time actions, driven by complex decisions involving a pipeline of sensing, perception, planning, and reaction tasks. These tasks must be scheduled on resource-constrained devices such that the performance goals and the requirements of the application are met. This is a difficult scheduling problem that requires handling multiple scheduling dimensions, and variations in resource usage and availability. In practice, system designers manually tune parameters for their specific hardware and application, which results in poor generalization and increases the development burden. In this work, we highlight the emerging need for scheduling CPU resources at runtime in sense-react systems. We study three canonical applications (face tracking, robot navigation, and VR) to first understand the key scheduling requirements for such systems. Armed with this understanding, we develop a scheduling framework, Catan, that dynamically schedules compute resources across different components of an app so as to meet the specified application requirements. Through experiments with a prototype implemented on a widely-used robotics framework (ROS) and an open-source AR/VR platform, we show the impact of system scheduling on meeting the performance goals for the three applications, how Catan is able to achieve better application performance than hand-tuned configurations, and how it dynamically adapts to runtime variations.