 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterPrior: Scaling Generative Control for Physics-Based Human-Object Interactions
Feb 05, 2026Humans rarely plan whole-body interactions with objects at the level of explicit whole-body movements. High-level intentions, such as affordance, define the goal, while coordinated balance, contact, and manipulation can emerge naturally from underlying physical and motor priors. Scaling such priors is key to enabling humanoids to compose and generalize loco-manipulation skills across diverse contexts while maintaining physically coherent whole-body coordination. To this end, we introduce InterPrior, a scalable framework that learns a unified generative controller through large-scale imitation pretraining and post-training by reinforcement learning. InterPrior first distills a full-reference imitation expert into a versatile, goal-conditioned variational policy that reconstructs motion from multimodal observations and high-level intent. While the distilled policy reconstructs training behaviors, it does not generalize reliably due to the vast configuration space of large-scale human-object interactions. To address this, we apply data augmentation with physical perturbations, and then perform reinforcement learning finetuning to improve competence on unseen goals and initializations. Together, these steps consolidate the reconstructed latent skills into a valid manifold, yielding a motion prior that generalizes beyond the training data, e.g., it can incorporate new behaviors such as interactions with unseen objects. We further demonstrate its effectiveness for user-interactive control and its potential for real robot deployment.
The RoboSense Challenge: Sense Anything, Navigate Anywhere, Adapt Across Platforms
Jan 08, 2026Autonomous systems are increasingly deployed in open and dynamic environments -- from city streets to aerial and indoor spaces -- where perception models must remain reliable under sensor noise, environmental variation, and platform shifts. However, even state-of-the-art methods often degrade under unseen conditions, highlighting the need for robust and generalizable robot sensing. The RoboSense 2025 Challenge is designed to advance robustness and adaptability in robot perception across diverse sensing scenarios. It unifies five complementary research tracks spanning language-grounded decision making, socially compliant navigation, sensor configuration generalization, cross-view and cross-modal correspondence, and cross-platform 3D perception. Together, these tasks form a comprehensive benchmark for evaluating real-world sensing reliability under domain shifts, sensor failures, and platform discrepancies. RoboSense 2025 provides standardized datasets, baseline models, and unified evaluation protocols, enabling large-scale and reproducible comparison of robust perception methods. The challenge attracted 143 teams from 85 institutions across 16 countries, reflecting broad community engagement. By consolidating insights from 23 winning solutions, this report highlights emerging methodological trends, shared design principles, and open challenges across all tracks, marking a step toward building robots that can sense reliably, act robustly, and adapt across platforms in real-world environments.
STSBench: A Spatio-temporal Scenario Benchmark for Multi-modal Large Language Models in Autonomous Driving
Jun 06, 2025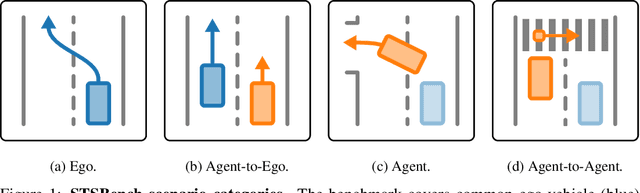
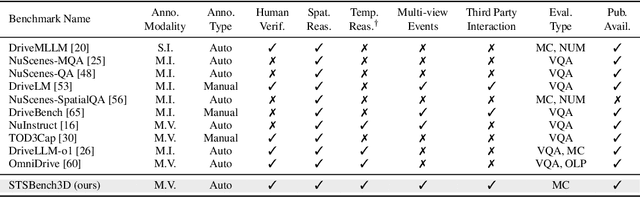
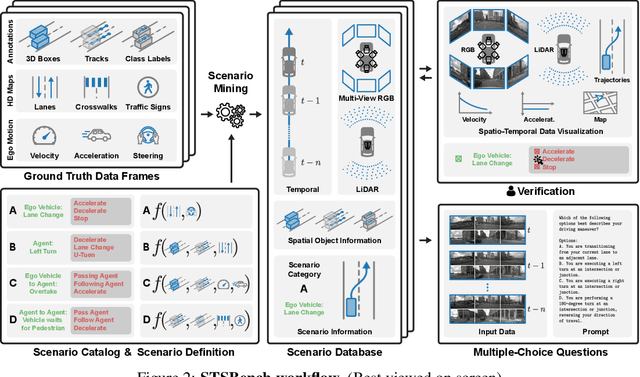
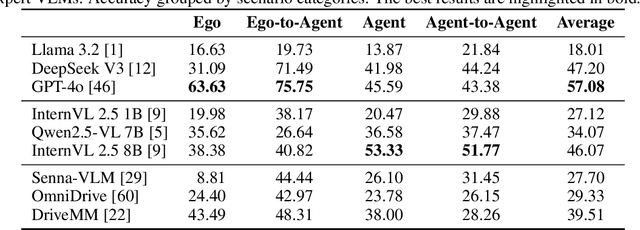
We introduce STSBench, a scenario-based framework to benchmark the holistic understanding of vision-language models (VLMs) for autonomous driving. The framework automatically mines pre-defined traffic scenarios from any dataset using ground-truth annotations, provides an intuitive user interface for efficient human verification, and generates multiple-choice questions for model evaluation. Applied to the NuScenes dataset, we present STSnu, the first benchmark that evaluates the spatio-temporal reasoning capabilities of VLMs based on comprehensive 3D perception. Existing benchmarks typically target off-the-shelf or fine-tuned VLMs for images or videos from a single viewpoint and focus on semantic tasks such as object recognition, dense captioning, risk assessment, or scene understanding. In contrast, STSnu evaluates driving expert VLMs for end-to-end driving, operating on videos from multi-view cameras or LiDAR. It specifically assesses their ability to reason about both ego-vehicle actions and complex interactions among traffic participants, a crucial capability for autonomous vehicles. The benchmark features 43 diverse scenarios spanning multiple views and frames, resulting in 971 human-verified multiple-choice questions. A thorough evaluation uncovers critical shortcomings in existing models' ability to reason about fundamental traffic dynamics in complex environments. These findings highlight the urgent need for architectural advances that explicitly model spatio-temporal reasoning. By addressing a core gap in spatio-temporal evaluation, STSBench enables the development of more robust and explainable VLMs for autonomous driving.
GBlobs: Explicit Local Structure via Gaussian Blobs for Improved Cross-Domain LiDAR-based 3D Object Detection
Mar 11, 2025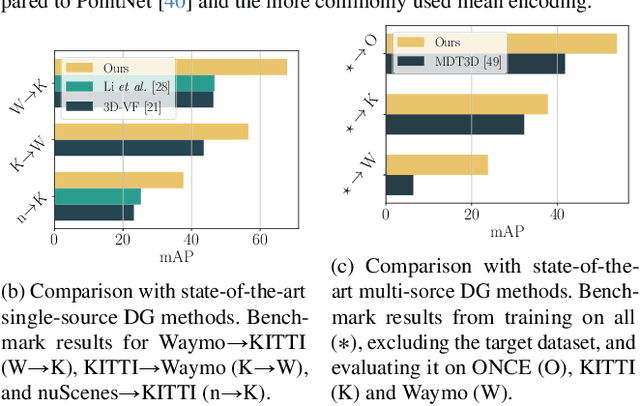
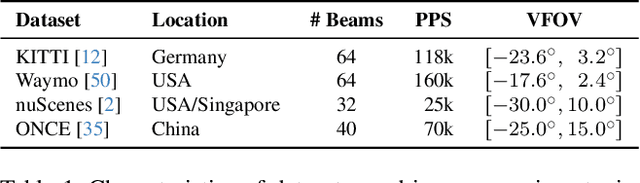
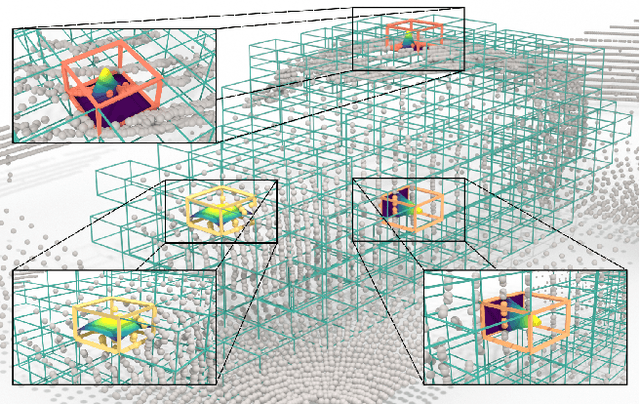
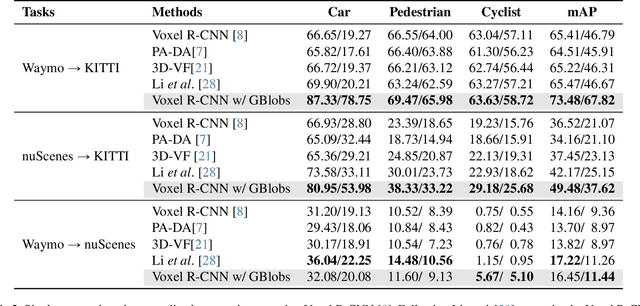
LiDAR-based 3D detectors need large datasets for training, yet they struggle to generalize to novel domains. Domain Generalization (DG) aims to mitigate this by training detectors that are invariant to such domain shifts. Current DG approaches exclusively rely on global geometric features (point cloud Cartesian coordinates) as input features. Over-reliance on these global geometric features can, however, cause 3D detectors to prioritize object location and absolute position, resulting in poor cross-domain performance. To mitigate this, we propose to exploit explicit local point cloud structure for DG, in particular by encoding point cloud neighborhoods with Gaussian blobs, GBlobs. Our proposed formulation is highly efficient and requires no additional parameters. Without any bells and whistles, simply by integrating GBlobs in existing detectors, we beat the current state-of-the-art in challenging single-source DG benchmarks by over 21 mAP (Waymo->KITTI), 13 mAP (KITTI->Waymo), and 12 mAP (nuScenes->KITTI), without sacrificing in-domain performance. Additionally, GBlobs demonstrate exceptional performance in multi-source DG, surpassing the current state-of-the-art by 17, 12, and 5 mAP on Waymo, KITTI, and ONCE, respectively.
LiSu: A Dataset and Method for LiDAR Surface Normal Estimation
Mar 11, 2025


While surface normals are widely used to analyse 3D scene geometry, surface normal estimation from LiDAR point clouds remains severely underexplored. This is caused by the lack of large-scale annotated datasets on the one hand, and lack of methods that can robustly handle the sparse and often noisy LiDAR data in a reasonable time on the other hand. We address these limitations using a traffic simulation engine and present LiSu, the first large-scale, synthetic LiDAR point cloud dataset with ground truth surface normal annotations, eliminating the need for tedious manual labeling. Additionally, we propose a novel method that exploits the spatiotemporal characteristics of autonomous driving data to enhance surface normal estimation accuracy. By incorporating two regularization terms, we enforce spatial consistency among neighboring points and temporal smoothness across consecutive LiDAR frames. These regularizers are particularly effective in self-training settings, where they mitigate the impact of noisy pseudo-labels, enabling robust real-world deployment. We demonstrate the effectiveness of our method on LiSu, achieving state-of-the-art performance in LiDAR surface normal estimation. Moreover, we showcase its full potential in addressing the challenging task of synthetic-to-real domain adaptation, leading to improved neural surface reconstruction on real-world data.
Resolving Inconsistent Semantics in Multi-Dataset Image Segmentation
Sep 15, 2024Leveraging multiple training datasets to scale up image segmentation models is beneficial for increasing robustness and semantic understanding. Individual datasets have well-defined ground truth with non-overlapping mask layouts and mutually exclusive semantics. However, merging them for multi-dataset training disrupts this harmony and leads to semantic inconsistencies; for example, the class "person" in one dataset and class "face" in another will require multilabel handling for certain pixels. Existing methods struggle with this setting, particularly when evaluated on label spaces mixed from the individual training sets. To overcome these issues, we introduce a simple yet effective multi-dataset training approach by integrating language-based embeddings of class names and label space-specific query embeddings. Our method maintains high performance regardless of the underlying inconsistencies between training datasets. Notably, on four benchmark datasets with label space inconsistencies during inference, we outperform previous methods by 1.6% mIoU for semantic segmentation, 9.1% PQ for panoptic segmentation, 12.1% AP for instance segmentation, and 3.0% in the newly proposed PIQ metric.
Progressive Token Length Scaling in Transformer Encoders for Efficient Universal Segmentation
Apr 23, 2024



A powerful architecture for universal segmentation relies on transformers that encode multi-scale image features and decode object queries into mask predictions. With efficiency being a high priority for scaling such models, we observed that the state-of-the-art method Mask2Former uses ~50% of its compute only on the transformer encoder. This is due to the retention of a full-length token-level representation of all backbone feature scales at each encoder layer. With this observation, we propose a strategy termed PROgressive Token Length SCALing for Efficient transformer encoders (PRO-SCALE) that can be plugged-in to the Mask2Former-style segmentation architectures to significantly reduce the computational cost. The underlying principle of PRO-SCALE is: progressively scale the length of the tokens with the layers of the encoder. This allows PRO-SCALE to reduce computations by a large margin with minimal sacrifice in performance (~52% GFLOPs reduction with no drop in performance on COCO dataset). We validate our framework on multiple public benchmarks.
Self-Training Large Language Models for Improved Visual Program Synthesis With Visual Reinforcement
Apr 06, 2024



Visual program synthesis is a promising approach to exploit the reasoning abilities of large language models for compositional computer vision tasks. Previous work has used few-shot prompting with frozen LLMs to synthesize visual programs. Training an LLM to write better visual programs is an attractive prospect, but it is unclear how to accomplish this. No dataset of visual programs for training exists, and acquisition of a visual program dataset cannot be easily crowdsourced due to the need for expert annotators. To get around the lack of direct supervision, we explore improving the program synthesis abilities of an LLM using feedback from interactive experience. We propose a method where we exploit existing annotations for a vision-language task to improvise a coarse reward signal for that task, treat the LLM as a policy, and apply reinforced self-training to improve the visual program synthesis ability of the LLM for that task. We describe a series of experiments on object detection, compositional visual question answering, and image-text retrieval, and show that in each case, the self-trained LLM outperforms or performs on par with few-shot frozen LLMs that are an order of magnitude larger. Website: https://zaidkhan.me/ViReP
AIDE: An Automatic Data Engine for Object Detection in Autonomous Driving
Mar 26, 2024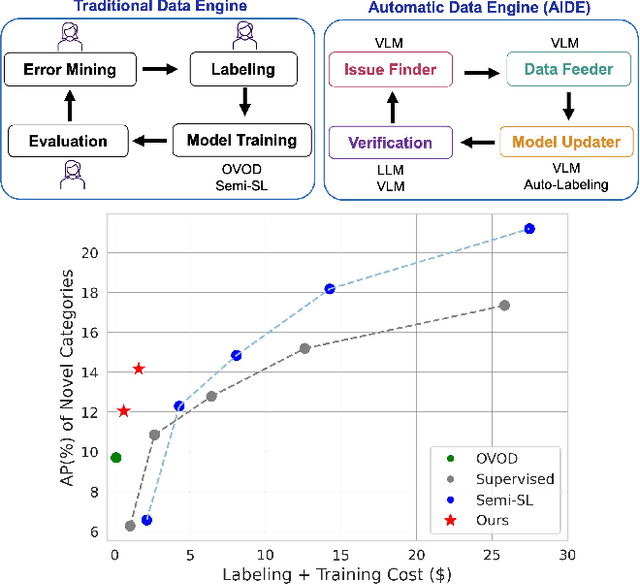
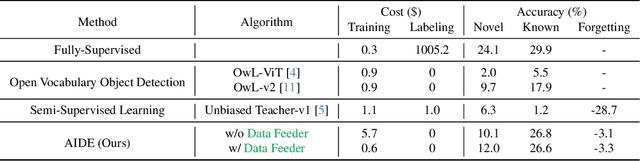
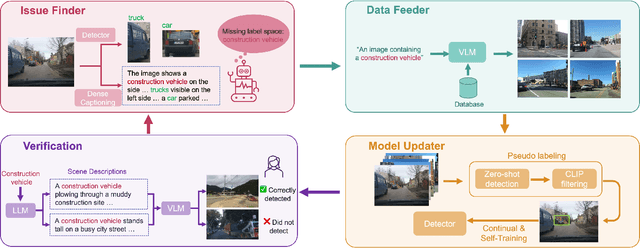
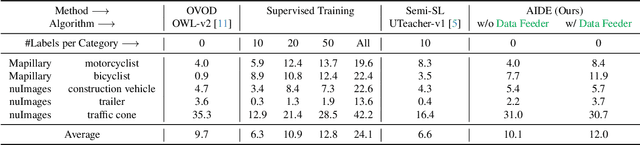
Autonomous vehicle (AV) systems rely on robust perception models as a cornerstone of safety assurance. However, objects encountered on the road exhibit a long-tailed distribution, with rare or unseen categories posing challenges to a deployed perception model. This necessitates an expensive process of continuously curating and annotating data with significant human effort. We propose to leverage recent advances in vision-language and large language models to design an Automatic Data Engine (AIDE) that automatically identifies issues, efficiently curates data, improves the model through auto-labeling, and verifies the model through generation of diverse scenarios. This process operates iteratively, allowing for continuous self-improvement of the model. We further establish a benchmark for open-world detection on AV datasets to comprehensively evaluate various learning paradigms, demonstrating our method's superior performance at a reduced cost.
Generating Enhanced Negatives for Training Language-Based Object Detectors
Dec 29, 2023The recent progress in language-based open-vocabulary object detection can be largely attributed to finding better ways of leveraging large-scale data with free-form text annotations. Training such models with a discriminative objective function has proven successful, but requires good positive and negative samples. However, the free-form nature and the open vocabulary of object descriptions make the space of negatives extremely large. Prior works randomly sample negatives or use rule-based techniques to build them. In contrast, we propose to leverage the vast knowledge built into modern generative models to automatically build negatives that are more relevant to the original data. Specifically, we use large-language-models to generate negative text descriptions, and text-to-image diffusion models to also generate corresponding negative images. Our experimental analysis confirms the relevance of the generated negative data, and its use in language-based detectors improves performance on two complex benchmarks.