 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIDE: An Automatic Data Engine for Object Detection in Autonomous Driving
Paper and Code
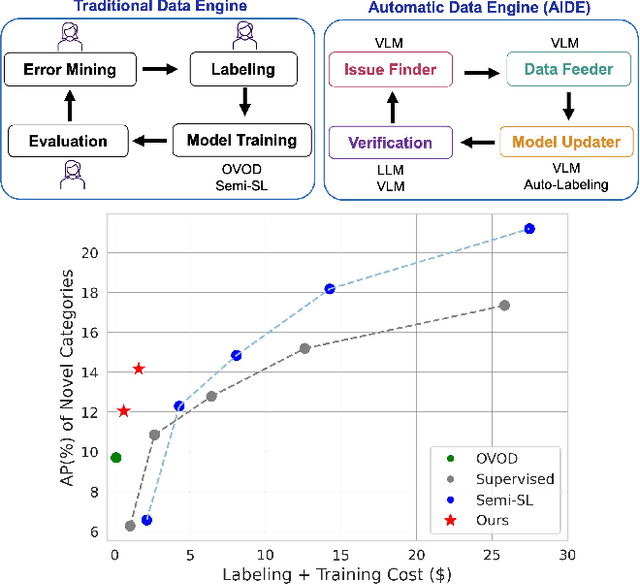
Autonomous vehicle (AV) systems rely on robust perception models as a cornerstone of safety assurance. However, objects encountered on the road exhibit a long-tailed distribution, with rare or unseen categories posing challenges to a deployed perception model. This necessitates an expensive process of continuously curating and annotating data with significant human effort. We propose to leverage recent advances in vision-language and large language models to design an Automatic Data Engine (AIDE) that automatically identifies issues, efficiently curates data, improves the model through auto-labeling, and verifies the model through generation of diverse scenarios. This process operates iteratively, allowing for continuous self-improvement of the model. We further establish a benchmark for open-world detection on AV datasets to comprehensively evaluate various learning paradigms, demonstrating our method's superior performance at a reduced cost.