 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchy-Aware Fine-Tuning of Vision-Language Models
Dec 25, 2025Vision-Language Models (VLMs) learn powerful multimodal representations through large-scale image-text pretraining, but adapting them to hierarchical classification is underexplored. Standard approaches treat labels as flat categories and require full fine-tuning, which is expensive and produces inconsistent predictions across taxonomy levels. We propose an efficient hierarchy-aware fine-tuning framework that updates a few parameters while enforcing structural consistency. We combine two objectives: Tree-Path KL Divergence (TP-KL) aligns predictions along the ground-truth label path for vertical coherence, while Hierarchy-Sibling Smoothed Cross-Entropy (HiSCE) encourages consistent predictions among sibling classes. Both losses work in the VLM's shared embedding space and integrate with lightweight LoRA adaptation. Experiments across multiple benchmarks show consistent improvements in Full-Path Accuracy and Tree-based Inconsistency Error with minimal parameter overhead. Our approach provides an efficient strategy for adapting VLMs to structured taxonomies.
Average Calibration Losses for Reliable Uncertainty in Medical Image Segmentation
Jun 04, 2025Deep neural networks for medical image segmentation are often overconfident, compromising both reliability and clinical utility. In this work, we propose differentiable formulations of marginal L1 Average Calibration Error (mL1-ACE) as an auxiliary loss that can be computed on a per-image basis. We compare both hard- and soft-binning approaches to directly improve pixel-wise calibration. Our experiments on four datasets (ACDC, AMOS, KiTS, BraTS) demonstrate that incorporating mL1-ACE significantly reduces calibration errors, particularly Average Calibration Error (ACE) and Maximum Calibration Error (MCE), while largely maintaining high Dice Similarity Coefficients (DSCs). We find that the soft-binned variant yields the greatest improvements in calibration, over the Dice plus cross-entropy loss baseline, but often compromises segmentation performance, with hard-binned mL1-ACE maintaining segmentation performance, albeit with weaker calibration improvement. To gain further insight into calibration performance and its variability across an imaging dataset, we introduce dataset reliability histograms, an aggregation of per-image reliability diagrams. The resulting analysis highlights improved alignment between predicted confidences and true accuracies. Overall, our approach not only enhances the trustworthiness of segmentation predictions but also shows potential for safer integration of deep learning methods into clinical workflows. We share our code here: https://github.com/cai4cai/Average-Calibration-Losses
Beyond Academic Benchmarks: Critical Analysis and Best Practices for Visual Industrial Anomaly Detection
Mar 30, 2025Anomaly detection (AD) is essential for automating visual inspection in manufacturing. This field of computer vision is rapidly evolving, with increasing attention towards real-world applications. Meanwhile, popular datasets are typically produced in controlled lab environments with artificially created defects, unable to capture the diversity of real production conditions. New methods often fail in production settings, showing significant performance degradation or requiring impractical computational resources. This disconnect between academic results and industrial viability threatens to misdirect visual anomaly detection research. This paper makes three key contributions: (1) we demonstrate the importance of real-world datasets and establish benchmarks using actual production data, (2) we provide a fair comparison of existing SOTA methods across diverse tasks by utilizing metrics that are valuable for practical applications, and (3) we present a comprehensive analysis of recent advancements in this field by discussing important challenges and new perspectives for bridging the academia-industry gap. The code is publicly available at https://github.com/abc-125/viad-benchmark
FEVER-OOD: Free Energy Vulnerability Elimination for Robust Out-of-Distribution Detection
Dec 02, 2024



Modern machine learning models, that excel on computer vision tasks such as classification and object detection, are often overconfident in their predictions for Out-of-Distribution (OOD) examples, resulting in unpredictable behaviour for open-set environments. Recent works have demonstrated that the free energy score is an effective measure of uncertainty for OOD detection given its close relationship to the data distribution. However, despite free energy-based methods representing a significant empirical advance in OOD detection, our theoretical analysis reveals previously unexplored and inherent vulnerabilities within the free energy score formulation such that in-distribution and OOD instances can have distinct feature representations yet identical free energy scores. This phenomenon occurs when the vector direction representing the feature space difference between the in-distribution and OOD sample lies within the null space of the last layer of a neural-based classifier. To mitigate these issues, we explore lower-dimensional feature spaces to reduce the null space footprint and introduce novel regularisation to maximize the least singular value of the final linear layer, hence enhancing inter-sample free energy separation. We refer to these techniques as Free Energy Vulnerability Elimination for Robust Out-of-Distribution Detection (FEVER-OOD). Our experiments show that FEVER-OOD techniques achieve state of the art OOD detection in Imagenet-100, with average OOD false positive rate (at 95% true positive rate) of 35.83% when used with the baseline Dream-OOD model.
Anomalib: A Deep Learning Library for Anomaly Detection
Feb 16, 2022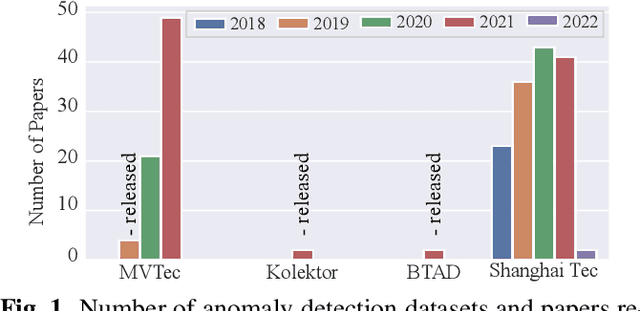

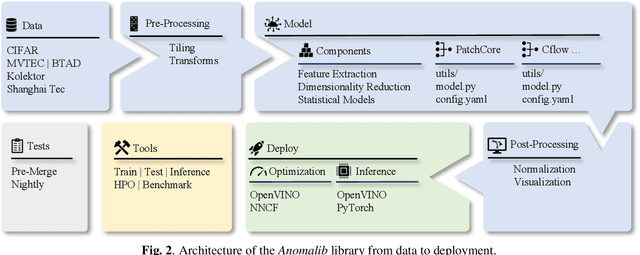

This paper introduces anomalib, a novel library for unsupervised anomaly detection and localization. With reproducibility and modularity in mind, this open-source library provides algorithms from the literature and a set of tools to design custom anomaly detection algorithms via a plug-and-play approach. Anomalib comprises state-of-the-art anomaly detection algorithms that achieve top performance on the benchmarks and that can be used off-the-shelf. In addition, the library provides components to design custom algorithms that could be tailored towards specific needs. Additional tools, including experiment trackers, visualizers, and hyper-parameter optimizers, make it simple to design and implement anomaly detection models. The library also supports OpenVINO model optimization and quantization for real-time deployment. Overall, anomalib is an extensive library for the design, implementation, and deployment of unsupervised anomaly detection models from data to the edge.
A Novel Incremental Learning Driven Instance Segmentation Framework to Recognize Highly Cluttered Instances of the Contraband Items
Jan 10, 2022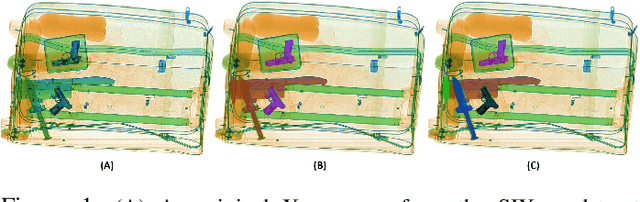
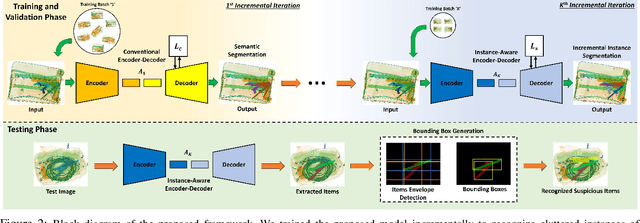
Screening cluttered and occluded contraband items from baggage X-ray scans is a cumbersome task even for the expert security staff. This paper presents a novel strategy that extends a conventional encoder-decoder architecture to perform instance-aware segmentation and extract merged instances of contraband items without using any additional sub-network or an object detector. The encoder-decoder network first performs conventional semantic segmentation and retrieves cluttered baggage items. The model then incrementally evolves during training to recognize individual instances using significantly reduced training batches. To avoid catastrophic forgetting, a novel objective function minimizes the network loss in each iteration by retaining the previously acquired knowledge while learning new class representations and resolving their complex structural inter-dependencies through Bayesian inference. A thorough evaluation of our framework on two publicly available X-ray datasets shows that it outperforms state-of-the-art methods, especially within the challenging cluttered scenarios, while achieving an optimal trade-off between detection accuracy and efficiency.
* IEEE Transactions on Systems, Man, and Cybernetics: Systems, Source code is available at https://github.com/taimurhassan/inc-inst-seg
Tensor Pooling Driven Instance Segmentation Framework for Baggage Threat Recognition
Aug 22, 2021

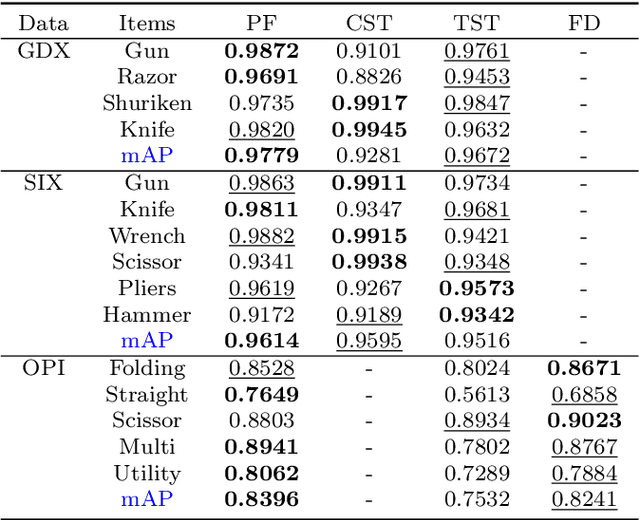
Automated systems designed for screening contraband items from the X-ray imagery are still facing difficulties with high clutter, concealment, and extreme occlusion. In this paper, we addressed this challenge using a novel multi-scale contour instance segmentation framework that effectively identifies the cluttered contraband data within the baggage X-ray scans. Unlike standard models that employ region-based or keypoint-based techniques to generate multiple boxes around objects, we propose to derive proposals according to the hierarchy of the regions defined by the contours. The proposed framework is rigorously validated on three public datasets, dubbed GDXray, SIXray, and OPIXray, where it outperforms the state-of-the-art methods by achieving the mean average precision score of 0.9779, 0.9614, and 0.8396, respectively. Furthermore, to the best of our knowledge, this is the first contour instance segmentation framework that leverages multi-scale information to recognize cluttered and concealed contraband data from the colored and grayscale security X-ray imagery.
Unsupervised Anomaly Instance Segmentation for Baggage Threat Recognition
Jul 16, 2021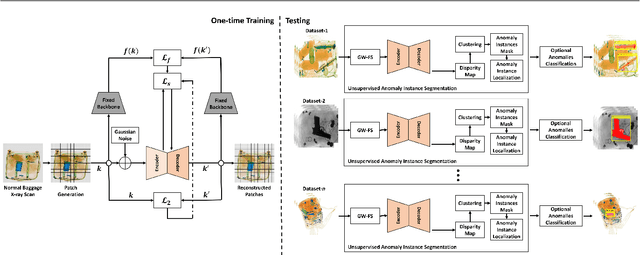



Identifying potential threats concealed within the baggage is of prime concern for the security staff. Many researchers have developed frameworks that can detect baggage threats from X-ray scans. However, to the best of our knowledge, all of these frameworks require extensive training on large-scale and well-annotated datasets, which are hard to procure in the real world. This paper presents a novel unsupervised anomaly instance segmentation framework that recognizes baggage threats, in X-ray scans, as anomalies without requiring any ground truth labels. Furthermore, thanks to its stylization capacity, the framework is trained only once, and at the inference stage, it detects and extracts contraband items regardless of their scanner specifications. Our one-staged approach initially learns to reconstruct normal baggage content via an encoder-decoder network utilizing a proposed stylization loss function. The model subsequently identifies the abnormal regions by analyzing the disparities within the original and the reconstructed scans. The anomalous regions are then clustered and post-processed to fit a bounding box for their localization. In addition, an optional classifier can also be appended with the proposed framework to recognize the categories of these extracted anomalies. A thorough evaluation of the proposed system on four public baggage X-ray datasets, without any re-training, demonstrates that it achieves competitive performance as compared to the conventional fully supervised methods (i.e., the mean average precision score of 0.7941 on SIXray, 0.8591 on GDXray, 0.7483 on OPIXray, and 0.5439 on COMPASS-XP dataset) while outperforming state-of-the-art semi-supervised and unsupervised baggage threat detection frameworks by 67.37%, 32.32%, 47.19%, and 45.81% in terms of F1 score across SIXray, GDXray, OPIXray, and COMPASS-XP datasets, respectively.
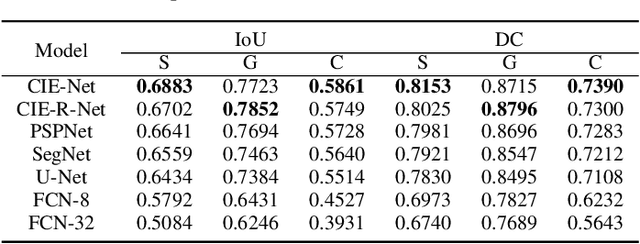
Multi-Model Learning for Real-Time Automotive Semantic Foggy Scene Understanding via Domain Adaptation
Dec 09, 2020

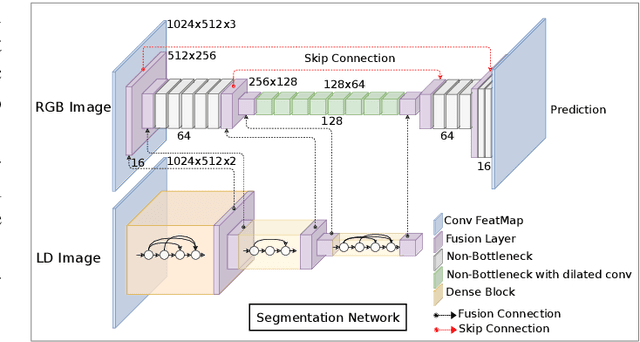

Robust semantic scene segmentation for automotive applications is a challenging problem in two key aspects: (1) labelling every individual scene pixel and (2) performing this task under unstable weather and illumination changes (e.g., foggy weather), which results in poor outdoor scene visibility. Such visibility limitations lead to non-optimal performance of generalised deep convolutional neural network-based semantic scene segmentation. In this paper, we propose an efficient end-to-end automotive semantic scene understanding approach that is robust to foggy weather conditions. As an end-to-end pipeline, our proposed approach provides: (1) the transformation of imagery from foggy to clear weather conditions using a domain transfer approach (correcting for poor visibility) and (2) semantically segmenting the scene using a competitive encoder-decoder architecture with low computational complexity (enabling real-time performance). Our approach incorporates RGB colour, depth and luminance images via distinct encoders with dense connectivity and features fusion to effectively exploit information from different inputs, which contributes to an optimal feature representation within the overall model. Using this architectural formulation with dense skip connections, our model achieves comparable performance to contemporary approaches at a fraction of the overall model complexity.
Competitive Simplicity for Multi-Task Learning for Real-Time Foggy Scene Understanding via Domain Adaptation
Dec 09, 2020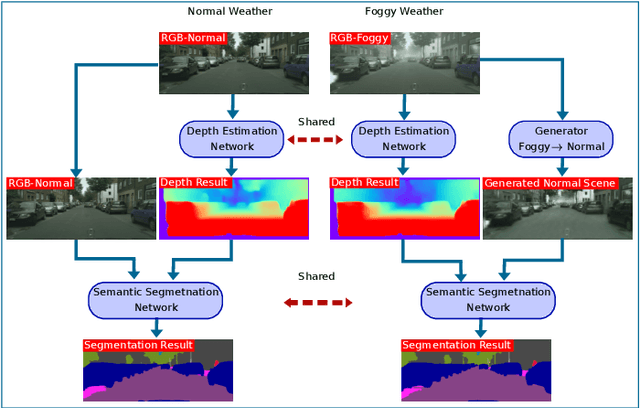
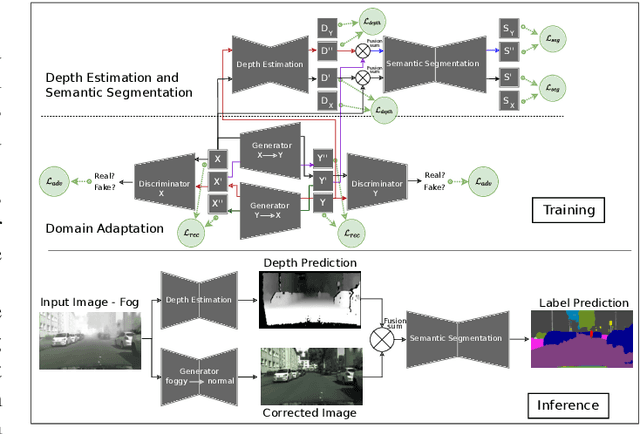

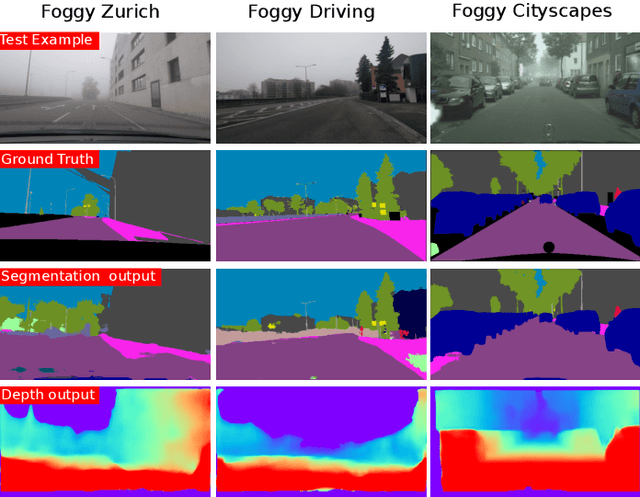
Automotive scene understanding under adverse weather conditions raises a realistic and challenging problem attributable to poor outdoor scene visibility (e.g. foggy weather). However, because most contemporary scene understanding approaches are applied under ideal-weather conditions, such approaches may not provide genuinely optimal performance when compared to established a priori insights on extreme-weather understanding. In this paper, we propose a complex but competitive multi-task learning approach capable of performing in real-time semantic scene understanding and monocular depth estimation under foggy weather conditions by leveraging both recent advances in adversarial training and domain adaptation. As an end-to-end pipeline, our model provides a novel solution to surpass degraded visibility in foggy weather conditions by transferring scenes from foggy to normal using a GAN-based model. For optimal performance in semantic segmentation, our model generates depth to be used as complementary source information with RGB in the segmentation network. We provide a robust method for foggy scene understanding by training two models (normal and foggy) simultaneously with shared weights (each model is trained on each weather condition independently). Our model incorporates RGB colour, depth, and luminance images via distinct encoders with dense connectivity and features fusing, and leverages skip connections to produce consistent depth and segmentation predictions. Using this architectural formulation with light computational complexity at inference time, we are able to achieve comparable performance to contemporary approaches at a fraction of the overall model complexity.