 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Model Learning for Real-Time Automotive Semantic Foggy Scene Understanding via Domain Adaptation
Dec 09, 2020


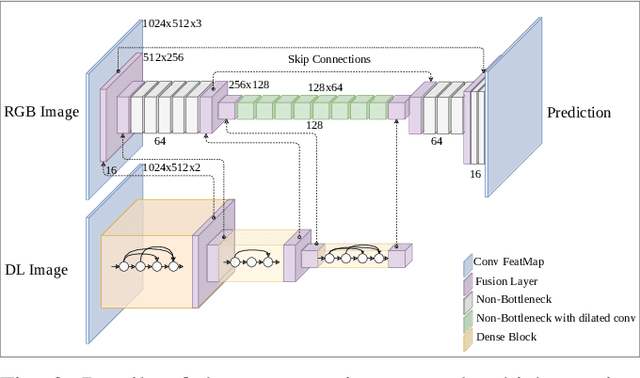
Robust semantic scene segmentation for automotive applications is a challenging problem in two key aspects: (1) labelling every individual scene pixel and (2) performing this task under unstable weather and illumination changes (e.g., foggy weather), which results in poor outdoor scene visibility. Such visibility limitations lead to non-optimal performance of generalised deep convolutional neural network-based semantic scene segmentation. In this paper, we propose an efficient end-to-end automotive semantic scene understanding approach that is robust to foggy weather conditions. As an end-to-end pipeline, our proposed approach provides: (1) the transformation of imagery from foggy to clear weather conditions using a domain transfer approach (correcting for poor visibility) and (2) semantically segmenting the scene using a competitive encoder-decoder architecture with low computational complexity (enabling real-time performance). Our approach incorporates RGB colour, depth and luminance images via distinct encoders with dense connectivity and features fusion to effectively exploit information from different inputs, which contributes to an optimal feature representation within the overall model. Using this architectural formulation with dense skip connections, our model achieves comparable performance to contemporary approaches at a fraction of the overall model complexity.
Competitive Simplicity for Multi-Task Learning for Real-Time Foggy Scene Understanding via Domain Adaptation
Dec 09, 2020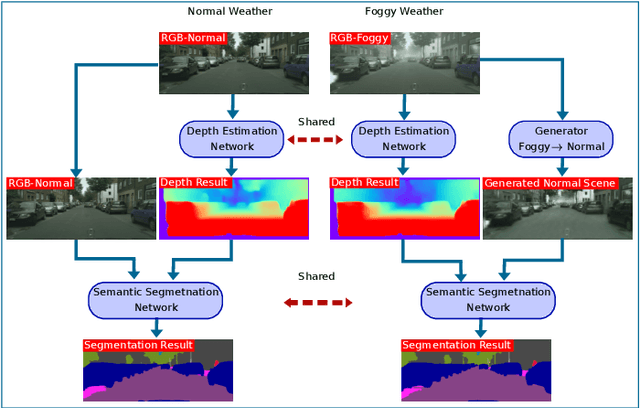
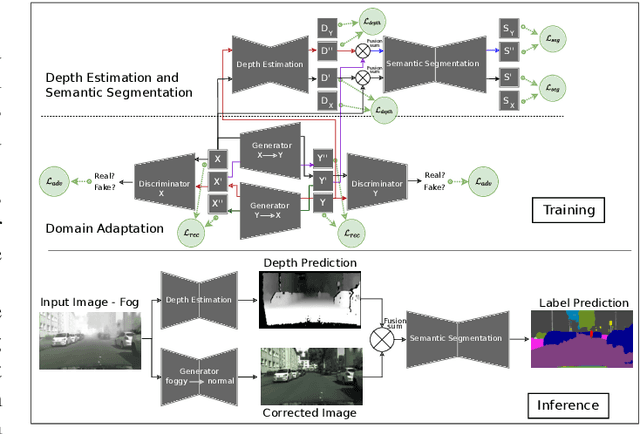

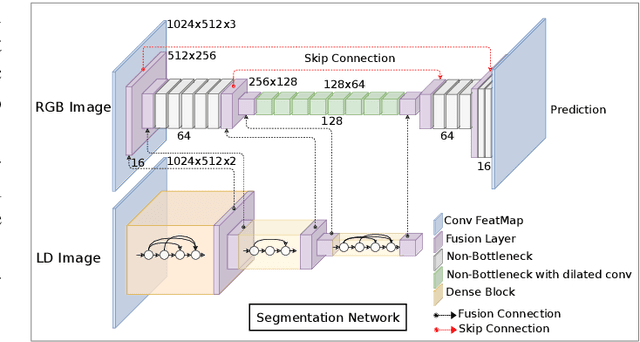
Automotive scene understanding under adverse weather conditions raises a realistic and challenging problem attributable to poor outdoor scene visibility (e.g. foggy weather). However, because most contemporary scene understanding approaches are applied under ideal-weather conditions, such approaches may not provide genuinely optimal performance when compared to established a priori insights on extreme-weather understanding. In this paper, we propose a complex but competitive multi-task learning approach capable of performing in real-time semantic scene understanding and monocular depth estimation under foggy weather conditions by leveraging both recent advances in adversarial training and domain adaptation. As an end-to-end pipeline, our model provides a novel solution to surpass degraded visibility in foggy weather conditions by transferring scenes from foggy to normal using a GAN-based model. For optimal performance in semantic segmentation, our model generates depth to be used as complementary source information with RGB in the segmentation network. We provide a robust method for foggy scene understanding by training two models (normal and foggy) simultaneously with shared weights (each model is trained on each weather condition independently). Our model incorporates RGB colour, depth, and luminance images via distinct encoders with dense connectivity and features fusing, and leverages skip connections to produce consistent depth and segmentation predictions. Using this architectural formulation with light computational complexity at inference time, we are able to achieve comparable performance to contemporary approaches at a fraction of the overall model complexity.
Multi-Task Learning for Automotive Foggy Scene Understanding via Domain Adaptation to an Illumination-Invariant Representation
Sep 17, 2019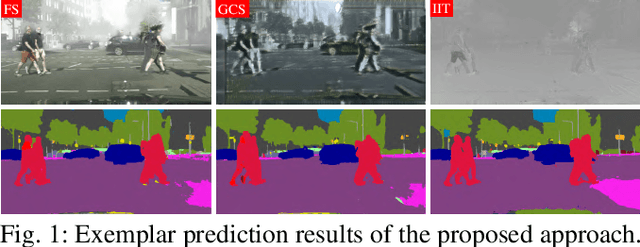
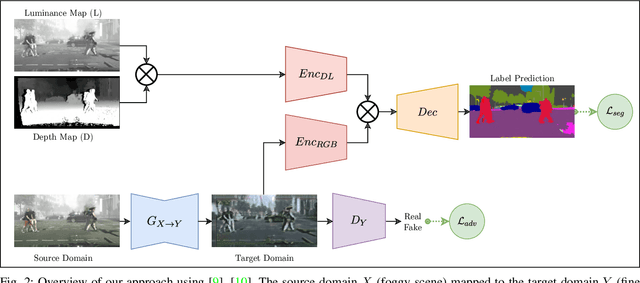
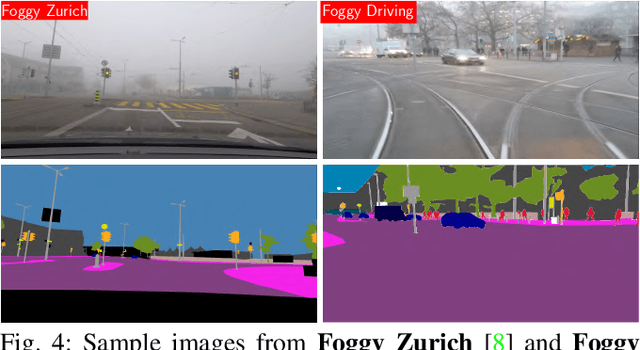
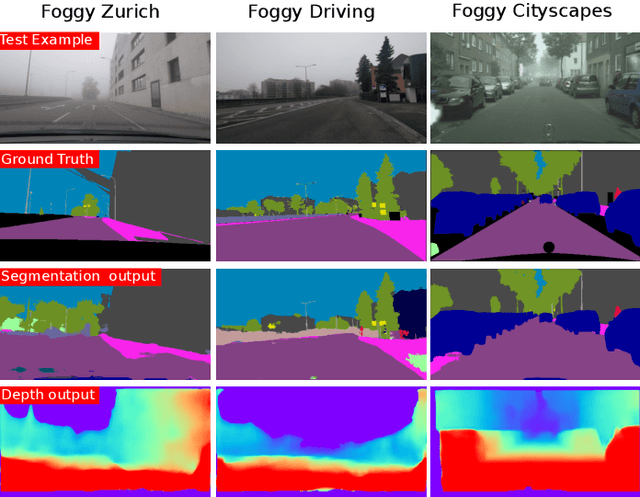
Joint scene understanding and segmentation for automotive applications is a challenging problem in two key aspects:- (1) classifying every pixel in the entire scene and (2) performing this task under unstable weather and illumination changes (e.g. foggy weather), which results in poor outdoor scene visibility. This poor outdoor scene visibility leads to a non-optimal performance of deep convolutional neural network-based scene understanding and segmentation. In this paper, we propose an efficient end-to-end contemporary automotive semantic scene understanding approach under foggy weather conditions, employing domain adaptation and illumination-invariant image per-transformation. As a multi-task pipeline, our proposed model provides:- (1) transferring images from extreme to clear-weather condition using domain transfer approach and (2) semantically segmenting a scene using a competitive encoder-decoder convolutional neural network (CNN) with dense connectivity, skip connections and fusion-based techniques. We evaluate our approach on challenging foggy datasets, including synthetic dataset (Foggy Cityscapes) as well as real-world datasets (Foggy Zurich and Foggy Driving). By incorporating RGB, depth, and illumination-invariant information, our approach outperforms the state-of-the-art within automotive scene understanding, under foggy weather condition.