 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSVisLoc: Generalizable Visual Localization for Gaussian Splatting Scene Representations
Aug 25, 2025We introduce GSVisLoc, a visual localization method designed for 3D Gaussian Splatting (3DGS) scene representations. Given a 3DGS model of a scene and a query image, our goal is to estimate the camera's position and orientation. We accomplish this by robustly matching scene features to image features. Scene features are produced by downsampling and encoding the 3D Gaussians while image features are obtained by encoding image patches. Our algorithm proceeds in three steps, starting with coarse matching, then fine matching, and finally by applying pose refinement for an accurate final estimate. Importantly, our method leverages the explicit 3DGS scene representation for visual localization without requiring modifications, retraining, or additional reference images. We evaluate GSVisLoc on both indoor and outdoor scenes, demonstrating competitive localization performance on standard benchmarks while outperforming existing 3DGS-based baselines. Moreover, our approach generalizes effectively to novel scenes without additional training.
Querying Kernel Methods Suffices for Reconstructing their Training Data
May 25, 2025
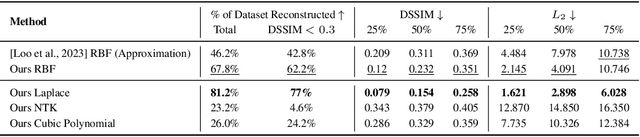
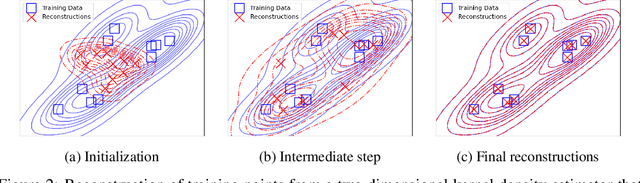
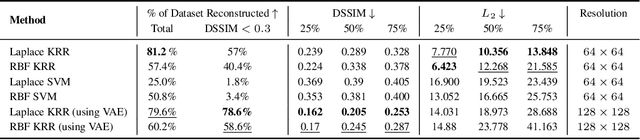
Over-parameterized models have raised concerns about their potential to memorize training data, even when achieving strong generalization. The privacy implications of such memorization are generally unclear, particularly in scenarios where only model outputs are accessible. We study this question in the context of kernel methods, and demonstrate both empirically and theoretically that querying kernel models at various points suffices to reconstruct their training data, even without access to model parameters. Our results hold for a range of kernel methods, including kernel regression, support vector machines, and kernel density estimation. Our hope is that this work can illuminate potential privacy concerns for such models.
Using Attention Sinks to Identify and Evaluate Dormant Heads in Pretrained LLMs
Apr 04, 2025Multi-head attention is foundational to large language models (LLMs), enabling different heads to have diverse focus on relevant input tokens. However, learned behaviors like attention sinks, where the first token receives most attention despite limited semantic importance, challenge our understanding of multi-head attention. To analyze this phenomenon, we propose a new definition for attention heads dominated by attention sinks, known as dormant attention heads. We compare our definition to prior work in a model intervention study where we test whether dormant heads matter for inference by zeroing out the output of dormant attention heads. Using six pretrained models and five benchmark datasets, we find our definition to be more model and dataset-agnostic. Using our definition on most models, more than 4% of a model's attention heads can be zeroed while maintaining average accuracy, and zeroing more than 14% of a model's attention heads can keep accuracy to within 1% of the pretrained model's average accuracy. Further analysis reveals that dormant heads emerge early in pretraining and can transition between dormant and active states during pretraining. Additionally, we provide evidence that they depend on characteristics of the input text.
Likelihood Training of Cascaded Diffusion Models via Hierarchical Volume-preserving Maps
Jan 13, 2025Cascaded models are multi-scale generative models with a marked capacity for producing perceptually impressive samples at high resolutions. In this work, we show that they can also be excellent likelihood models, so long as we overcome a fundamental difficulty with probabilistic multi-scale models: the intractability of the likelihood function. Chiefly, in cascaded models each intermediary scale introduces extraneous variables that cannot be tractably marginalized out for likelihood evaluation. This issue vanishes by modeling the diffusion process on latent spaces induced by a class of transformations we call hierarchical volume-preserving maps, which decompose spatially structured data in a hierarchical fashion without introducing local distortions in the latent space. We demonstrate that two such maps are well-known in the literature for multiscale modeling: Laplacian pyramids and wavelet transforms. Not only do such reparameterizations allow the likelihood function to be directly expressed as a joint likelihood over the scales, we show that the Laplacian pyramid and wavelet transform also produces significant improvements to the state-of-the-art on a selection of benchmarks in likelihood modeling, including density estimation, lossless compression, and out-of-distribution detection. Investigating the theoretical basis of our empirical gains we uncover deep connections to score matching under the Earth Mover's Distance (EMD), which is a well-known surrogate for perceptual similarity. Code can be found at \href{https://github.com/lihenryhfl/pcdm}{this https url}.
Consensus Learning with Deep Sets for Essential Matrix Estimation
Jun 25, 2024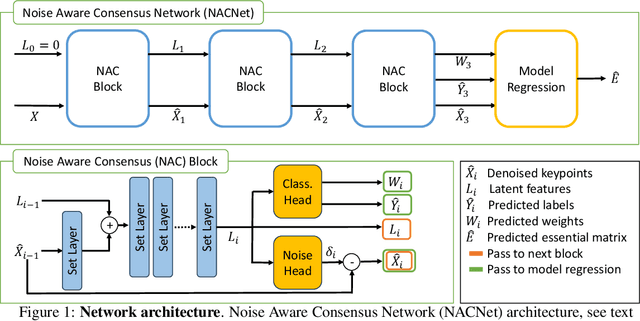
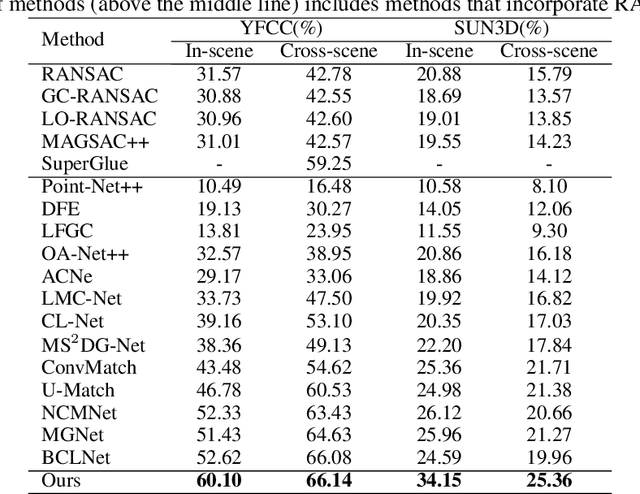
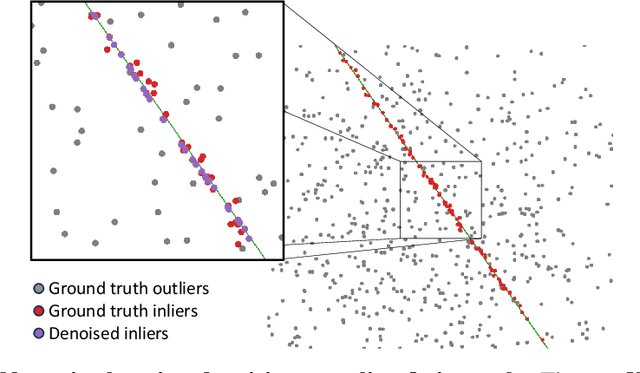
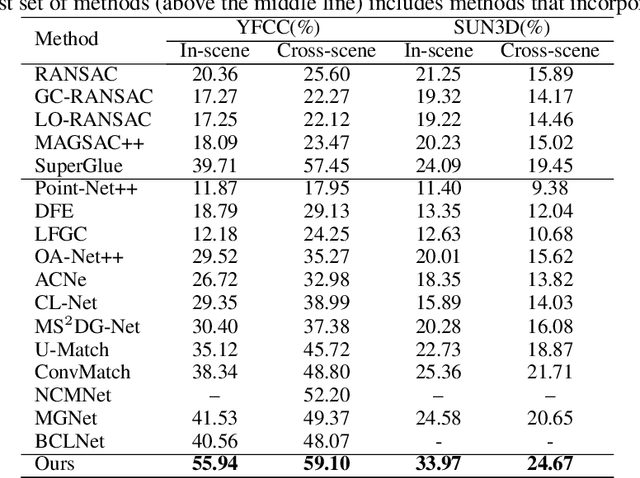
Robust estimation of the essential matrix, which encodes the relative position and orientation of two cameras, is a fundamental step in structure from motion pipelines. Recent deep-based methods achieved accurate estimation by using complex network architectures that involve graphs, attention layers, and hard pruning steps. Here, we propose a simpler network architecture based on Deep Sets. Given a collection of point matches extracted from two images, our method identifies outlier point matches and models the displacement noise in inlier matches. A weighted DLT module uses these predictions to regress the essential matrix. Our network achieves accurate recovery that is superior to existing networks with significantly more complex architectures.
CinePile: A Long Video Question Answering Dataset and Benchmark
May 14, 2024



Current datasets for long-form video understanding often fall short of providing genuine long-form comprehension challenges, as many tasks derived from these datasets can be successfully tackled by analyzing just one or a few random frames from a video. To address this issue, we present a novel dataset and benchmark, CinePile, specifically designed for authentic long-form video understanding. This paper details our innovative approach for creating a question-answer dataset, utilizing advanced LLMs with human-in-the-loop and building upon human-generated raw data. Our comprehensive dataset comprises 305,000 multiple-choice questions (MCQs), covering various visual and multimodal aspects, including temporal comprehension, understanding human-object interactions, and reasoning about events or actions within a scene. Additionally, we evaluate recent video-centric LLMs, both open-source and proprietary, on the test split of our dataset. The findings reveal that even state-of-the-art video-centric LLMs significantly lag behind human performance in these tasks, highlighting the complexity and challenge inherent in video understanding. The dataset is available at https://hf.co/datasets/tomg-group-umd/cinepile
RESFM: Robust Equivariant Multiview Structure from Motion
Apr 22, 2024Multiview Structure from Motion is a fundamental and challenging computer vision problem. A recent deep-based approach was proposed utilizing matrix equivariant architectures for the simultaneous recovery of camera pose and 3D scene structure from large image collections. This work however made the unrealistic assumption that the point tracks given as input are clean of outliers. Here we propose an architecture suited to dealing with outliers by adding an inlier/outlier classifying module that respects the model equivariance and by adding a robust bundle adjustment step. Experiments demonstrate that our method can be successfully applied in realistic settings that include large image collections and point tracks extracted with common heuristics and include many outliers.
Controlling the Inductive Bias of Wide Neural Networks by Modifying the Kernel's Spectrum
Jul 26, 2023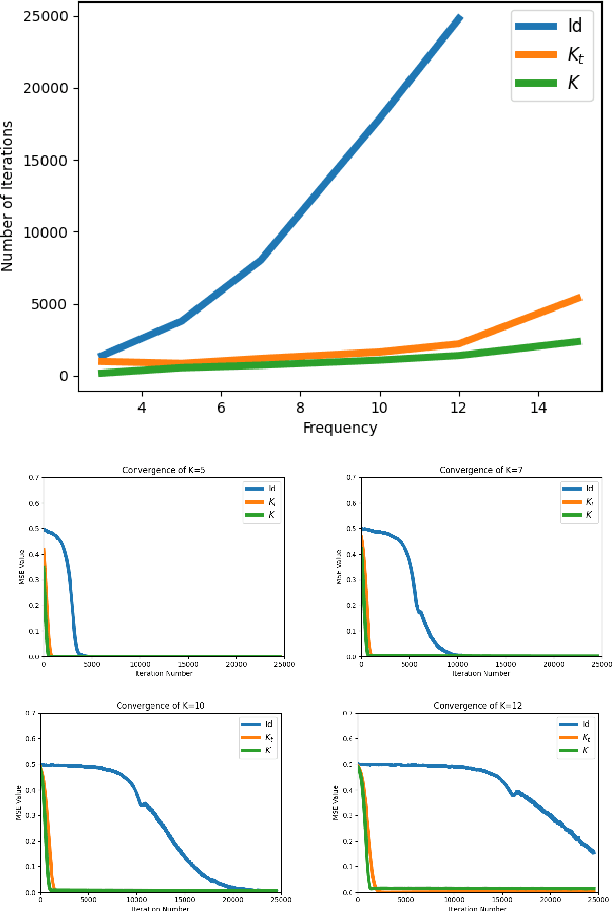
Wide neural networks are biased towards learning certain functions, influencing both the rate of convergence of gradient descent (GD) and the functions that are reachable with GD in finite training time. As such, there is a great need for methods that can modify this bias according to the task at hand. To that end, we introduce Modified Spectrum Kernels (MSKs), a novel family of constructed kernels that can be used to approximate kernels with desired eigenvalues for which no closed form is known. We leverage the duality between wide neural networks and Neural Tangent Kernels and propose a preconditioned gradient descent method, which alters the trajectory of GD. As a result, this allows for a polynomial and, in some cases, exponential training speedup without changing the final solution. Our method is both computationally efficient and simple to implement.
GRelPose: Generalizable End-to-End Relative Camera Pose Regression
Nov 27, 2022This paper proposes a generalizable, end-to-end deep learning-based method for relative pose regression between two images. Given two images of the same scene captured from different viewpoints, our algorithm predicts the relative rotation and translation between the two respective cameras. Despite recent progress in the field, current deep-based methods exhibit only limited generalization to scenes not seen in training. Our approach introduces a network architecture that extracts a grid of coarse features for each input image using the pre-trained LoFTR network. It subsequently relates corresponding features in the two images, and finally uses a convolutional network to recover the relative rotation and translation between the respective cameras. Our experiments indicate that the proposed architecture can generalize to novel scenes, obtaining higher accuracy than existing deep-learning-based methods in various settings and datasets, in particular with limited training data.
A Kernel Perspective of Skip Connections in Convolutional Networks
Nov 27, 2022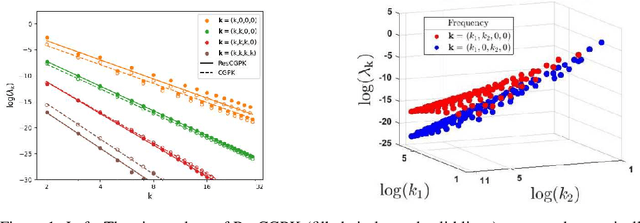

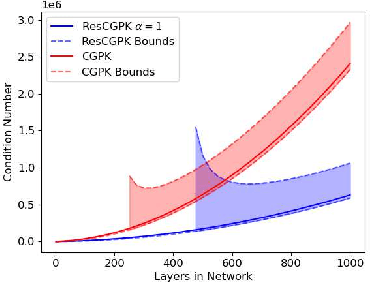
Over-parameterized residual networks (ResNets) are amongst the most successful convolutional neural architectures for image processing. Here we study their properties through their Gaussian Process and Neural Tangent kernels. We derive explicit formulas for these kernels, analyze their spectra, and provide bounds on their implied condition numbers. Our results indicate that (1) with ReLU activation, the eigenvalues of these residual kernels decay polynomially at a similar rate compared to the same kernels when skip connections are not used, thus maintaining a similar frequency bias; (2) however, residual kernels are more locally biased. Our analysis further shows that the matrices obtained by these residual kernels yield favorable condition numbers at finite depths than those obtained without the skip connections, enabling therefore faster convergence of training with gradient descent.