 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
Extending Puzzle for Mixture-of-Experts Reasoning Models with Application to GPT-OSS Acceleration
Feb 12, 2026Reasoning-focused LLMs improve answer quality by generating longer reasoning traces, but the additional tokens dramatically increase serving cost, motivating inference optimization. We extend and apply Puzzle, a post-training neural architecture search (NAS) framework, to gpt-oss-120B to produce gpt-oss-puzzle-88B, a deployment-optimized derivative. Our approach combines heterogeneous MoE expert pruning, selective replacement of full-context attention with window attention, FP8 KV-cache quantization with calibrated scales, and post-training reinforcement learning to recover accuracy, while maintaining low generation length. In terms of per-token speeds, on an 8XH100 node we achieve 1.63X and 1.22X throughput speedups in long-context and short-context settings, respectively. gpt-oss-puzzle-88B also delivers throughput speedups of 2.82X on a single NVIDIA H100 GPU. However, because token counts can change with reasoning effort and model variants, per-token throughput (tok/s) and latency (ms/token) do not necessarily lead to end-to-end speedups: a 2X throughput gain is erased if traces grow 2X. Conversely, throughput gains can be spent on more reasoning tokens to improve accuracy; we therefore advocate request-level efficiency metrics that normalize throughput by tokens generated and trace an accuracy--speed frontier across reasoning efforts. We show that gpt-oss-puzzle-88B improves over gpt-oss-120B along the entire frontier, delivering up to 1.29X higher request-level efficiency. Across various benchmarks, gpt-oss-puzzle-88B matches or slightly exceeds the parent on suite-average accuracy across reasoning efforts, with retention ranging from 100.8% (high) to 108.2% (low), showing that post-training architecture search can substantially reduce inference costs without sacrificing quality.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
FFN Fusion: Rethinking Sequential Computation in Large Language Models
Mar 24, 2025We introduce FFN Fusion, an architectural optimization technique that reduces sequential computation in large language models by identifying and exploiting natural opportunities for parallelization. Our key insight is that sequences of Feed-Forward Network (FFN) layers, particularly those remaining after the removal of specific attention layers, can often be parallelized with minimal accuracy impact. We develop a principled methodology for identifying and fusing such sequences, transforming them into parallel operations that significantly reduce inference latency while preserving model behavior. Applying these techniques to Llama-3.1-405B-Instruct, we create Llama-Nemotron-Ultra-253B-Base (Ultra-253B-Base), an efficient and soon-to-be publicly available model that achieves a 1.71X speedup in inference latency and 35X lower per-token cost while maintaining strong performance across benchmarks. Through extensive experiments on models from 49B to 253B parameters, we demonstrate that FFN Fusion becomes increasingly effective at larger scales and can complement existing optimization techniques like quantization and pruning. Most intriguingly, we find that even full transformer blocks containing both attention and FFN layers can sometimes be parallelized, suggesting new directions for neural architecture design.
Puzzle: Distillation-Based NAS for Inference-Optimized LLMs
Dec 03, 2024
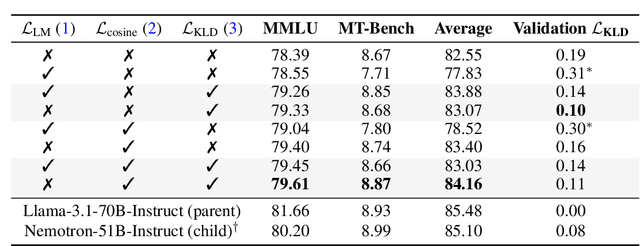

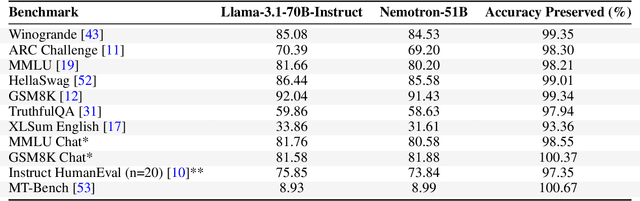
Large language models (LLMs) have demonstrated remarkable capabilities, but their adoption is limited by high computational costs during inference. While increasing parameter counts enhances accuracy, it also widens the gap between state-of-the-art capabilities and practical deployability. We present Puzzle, a framework to accelerate LLM inference on specific hardware while preserving their capabilities. Through an innovative application of neural architecture search (NAS) at an unprecedented scale, Puzzle systematically optimizes models with tens of billions of parameters under hardware constraints. Our approach utilizes blockwise local knowledge distillation (BLD) for parallel architecture exploration and employs mixed-integer programming for precise constraint optimization. We demonstrate the real-world impact of our framework through Llama-3.1-Nemotron-51B-Instruct (Nemotron-51B), a publicly available model derived from Llama-3.1-70B-Instruct. Nemotron-51B achieves a 2.17x inference throughput speedup, fitting on a single NVIDIA H100 GPU while preserving 98.4% of the original model's capabilities. Nemotron-51B currently stands as the most accurate language model capable of inference on a single GPU with large batch sizes. Remarkably, this transformation required just 45B training tokens, compared to over 15T tokens used for the 70B model it was derived from. This establishes a new paradigm where powerful models can be optimized for efficient deployment with only negligible compromise of their capabilities, demonstrating that inference performance, not parameter count alone, should guide model selection. With the release of Nemotron-51B and the presentation of the Puzzle framework, we provide practitioners immediate access to state-of-the-art language modeling capabilities at significantly reduced computational costs.
Controlling the Inductive Bias of Wide Neural Networks by Modifying the Kernel's Spectrum
Jul 26, 2023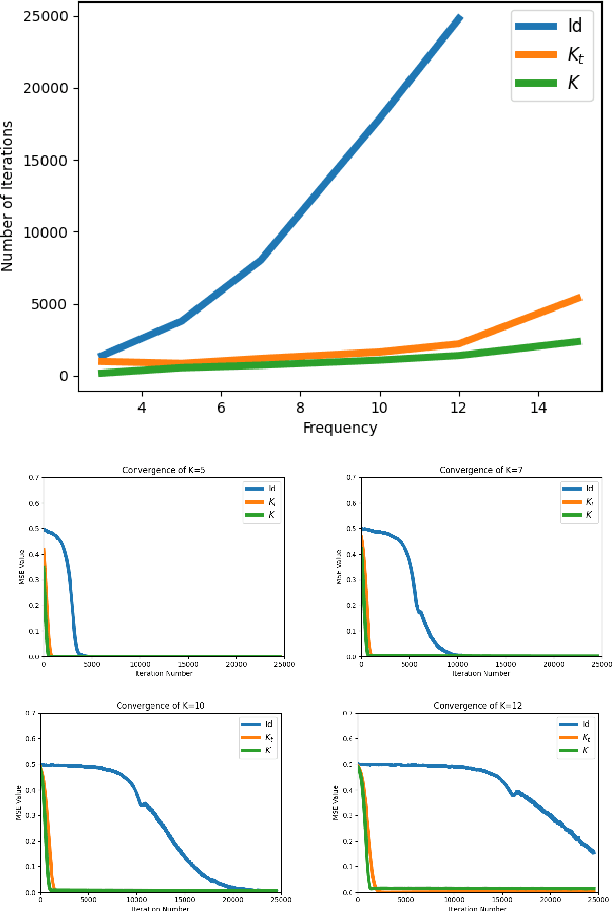
Wide neural networks are biased towards learning certain functions, influencing both the rate of convergence of gradient descent (GD) and the functions that are reachable with GD in finite training time. As such, there is a great need for methods that can modify this bias according to the task at hand. To that end, we introduce Modified Spectrum Kernels (MSKs), a novel family of constructed kernels that can be used to approximate kernels with desired eigenvalues for which no closed form is known. We leverage the duality between wide neural networks and Neural Tangent Kernels and propose a preconditioned gradient descent method, which alters the trajectory of GD. As a result, this allows for a polynomial and, in some cases, exponential training speedup without changing the final solution. Our method is both computationally efficient and simple to implement.
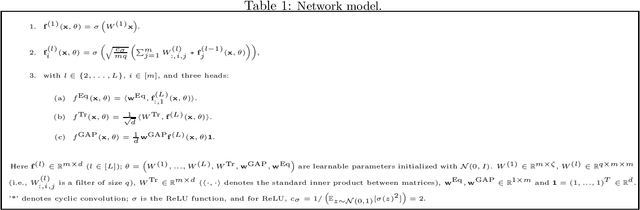
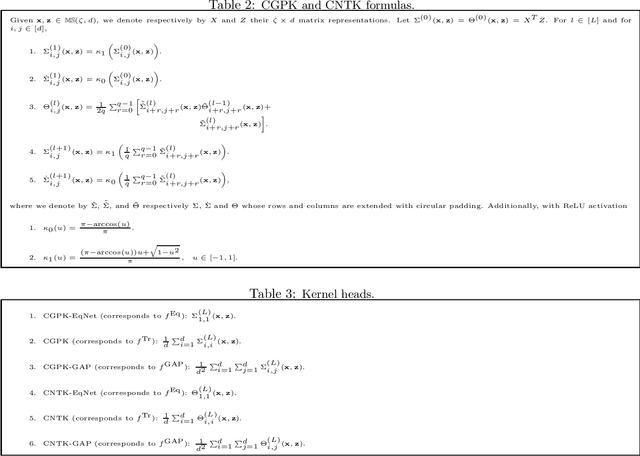
A Kernel Perspective of Skip Connections in Convolutional Networks
Nov 27, 2022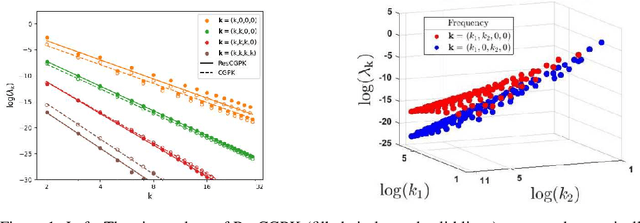

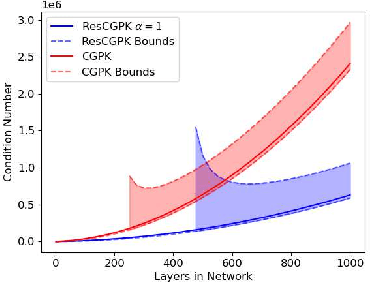
Over-parameterized residual networks (ResNets) are amongst the most successful convolutional neural architectures for image processing. Here we study their properties through their Gaussian Process and Neural Tangent kernels. We derive explicit formulas for these kernels, analyze their spectra, and provide bounds on their implied condition numbers. Our results indicate that (1) with ReLU activation, the eigenvalues of these residual kernels decay polynomially at a similar rate compared to the same kernels when skip connections are not used, thus maintaining a similar frequency bias; (2) however, residual kernels are more locally biased. Our analysis further shows that the matrices obtained by these residual kernels yield favorable condition numbers at finite depths than those obtained without the skip connections, enabling therefore faster convergence of training with gradient descent.
On the Spectral Bias of Convolutional Neural Tangent and Gaussian Process Kernels
Mar 17, 2022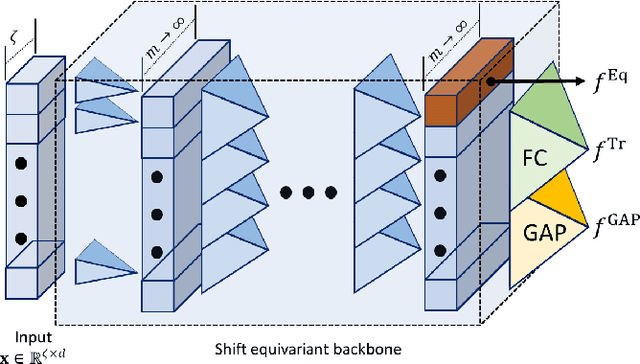
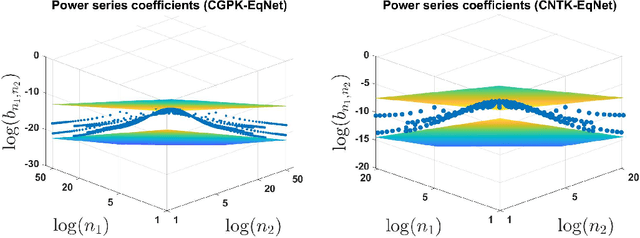
We study the properties of various over-parametrized convolutional neural architectures through their respective Gaussian process and neural tangent kernels. We prove that, with normalized multi-channel input and ReLU activation, the eigenfunctions of these kernels with the uniform measure are formed by products of spherical harmonics, defined over the channels of the different pixels. We next use hierarchical factorizable kernels to bound their respective eigenvalues. We show that the eigenvalues decay polynomially, quantify the rate of decay, and derive measures that reflect the composition of hierarchical features in these networks. Our results provide concrete quantitative characterization of over-parameterized convolutional network architectures.
Spectral Analysis of the Neural Tangent Kernel for Deep Residual Networks
Apr 07, 2021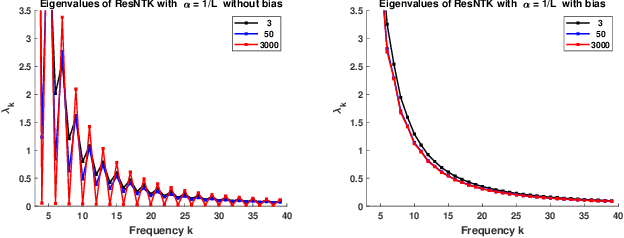

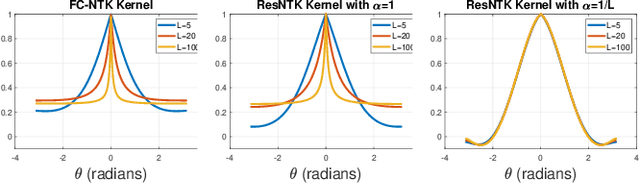
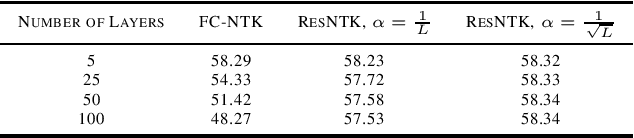
Deep residual network architectures have been shown to achieve superior accuracy over classical feed-forward networks, yet their success is still not fully understood. Focusing on massively over-parameterized, fully connected residual networks with ReLU activation through their respective neural tangent kernels (ResNTK), we provide here a spectral analysis of these kernels. Specifically, we show that, much like NTK for fully connected networks (FC-NTK), for input distributed uniformly on the hypersphere $\mathbb{S}^{d-1}$, the eigenfunctions of ResNTK are the spherical harmonics and the eigenvalues decay polynomially with frequency $k$ as $k^{-d}$. These in turn imply that the set of functions in their Reproducing Kernel Hilbert Space are identical to those of FC-NTK, and consequently also to those of the Laplace kernel. We further show, by drawing on the analogy to the Laplace kernel, that depending on the choice of a hyper-parameter that balances between the skip and residual connections ResNTK can either become spiky with depth, as with FC-NTK, or maintain a stable shape.