 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagentic-UI: Towards Human-in-the-loop Agentic Systems
Jul 30, 2025AI agents powered by large language models are increasingly capable of autonomously completing complex, multi-step tasks using external tools. Yet, they still fall short of human-level performance in most domains including computer use, software development, and research. Their growing autonomy and ability to interact with the outside world, also introduces safety and security risks including potentially misaligned actions and adversarial manipulation. We argue that human-in-the-loop agentic systems offer a promising path forward, combining human oversight and control with AI efficiency to unlock productivity from imperfect systems. We introduce Magentic-UI, an open-source web interface for developing and studying human-agent interaction. Built on a flexible multi-agent architecture, Magentic-UI supports web browsing, code execution, and file manipulation, and can be extended with diverse tools via Model Context Protocol (MCP). Moreover, Magentic-UI presents six interaction mechanisms for enabling effective, low-cost human involvement: co-planning, co-tasking, multi-tasking, action guards, and long-term memory. We evaluate Magentic-UI across four dimensions: autonomous task completion on agentic benchmarks, simulated user testing of its interaction capabilities, qualitative studies with real users, and targeted safety assessments. Our findings highlight Magentic-UI's potential to advance safe and efficient human-agent collaboration.
Magentic-One: A Generalist Multi-Agent System for Solving Complex Tasks
Nov 07, 2024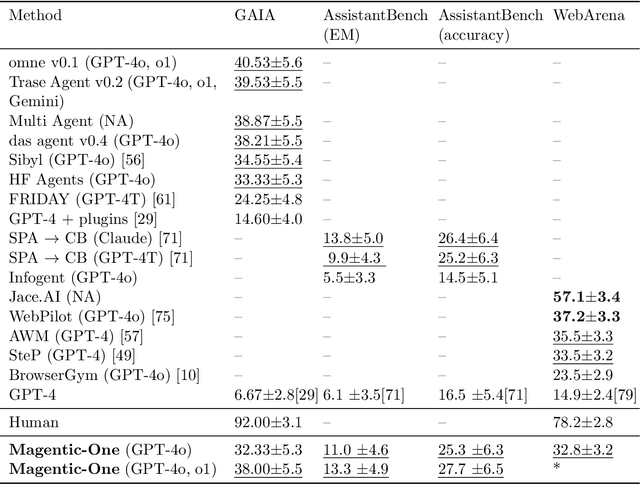
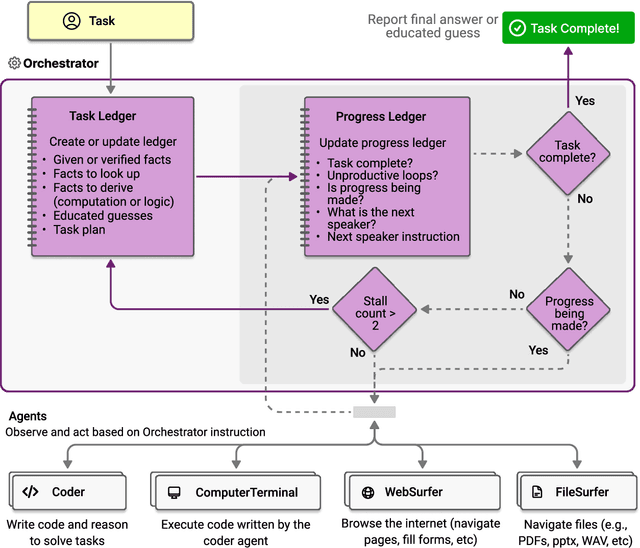
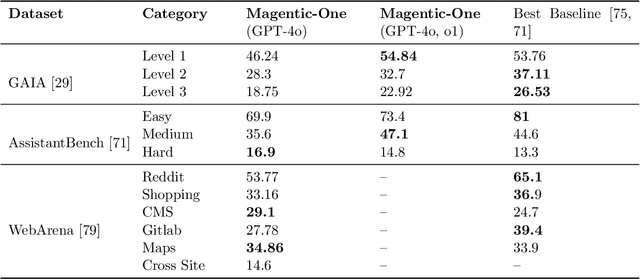
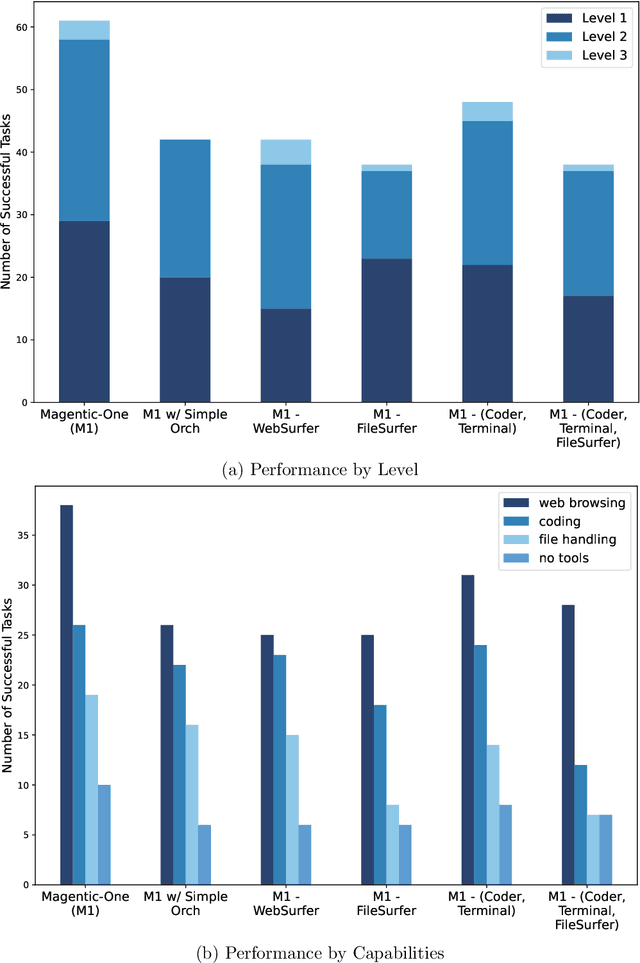
Modern AI agents, driven by advances in large foundation models, promise to enhance our productivity and transform our lives by augmenting our knowledge and capabilities. To achieve this vision, AI agents must effectively plan, perform multi-step reasoning and actions, respond to novel observations, and recover from errors, to successfully complete complex tasks across a wide range of scenarios. In this work, we introduce Magentic-One, a high-performing open-source agentic system for solving such tasks. Magentic-One uses a multi-agent architecture where a lead agent, the Orchestrator, plans, tracks progress, and re-plans to recover from errors. Throughout task execution, the Orchestrator directs other specialized agents to perform tasks as needed, such as operating a web browser, navigating local files, or writing and executing Python code. We show that Magentic-One achieves statistically competitive performance to the state-of-the-art on three diverse and challenging agentic benchmarks: GAIA, AssistantBench, and WebArena. Magentic-One achieves these results without modification to core agent capabilities or to how they collaborate, demonstrating progress towards generalist agentic systems. Moreover, Magentic-One's modular design allows agents to be added or removed from the team without additional prompt tuning or training, easing development and making it extensible to future scenarios. We provide an open-source implementation of Magentic-One, and we include AutoGenBench, a standalone tool for agentic evaluation. AutoGenBench provides built-in controls for repetition and isolation to run agentic benchmarks in a rigorous and contained manner -- which is important when agents' actions have side-effects. Magentic-One, AutoGenBench and detailed empirical performance evaluations of Magentic-One, including ablations and error analysis are available at https://aka.ms/magentic-one
PLEX: Making the Most of the Available Data for Robotic Manipulation Pretraining
Mar 15, 2023



A rich representation is key to general robotic manipulation, but existing model architectures require a lot of data to learn it. Unfortunately, ideal robotic manipulation training data, which comes in the form of expert visuomotor demonstrations for a variety of annotated tasks, is scarce. In this work we propose PLEX, a transformer-based architecture that learns from task-agnostic visuomotor trajectories accompanied by a much larger amount of task-conditioned object manipulation videos -- a type of robotics-relevant data available in quantity. The key insight behind PLEX is that the trajectories with observations and actions help induce a latent feature space and train a robot to execute task-agnostic manipulation routines, while a diverse set of video-only demonstrations can efficiently teach the robot how to plan in this feature space for a wide variety of tasks. In contrast to most works on robotic manipulation pretraining, PLEX learns a generalizable sensorimotor multi-task policy, not just an observational representation. We also show that using relative positional encoding in PLEX's transformers further increases its data efficiency when learning from human-collected demonstrations. Experiments showcase \appr's generalization on Meta-World-v2 benchmark and establish state-of-the-art performance in challenging Robosuite environments.
Relational Attention: Generalizing Transformers for Graph-Structured Tasks
Oct 11, 2022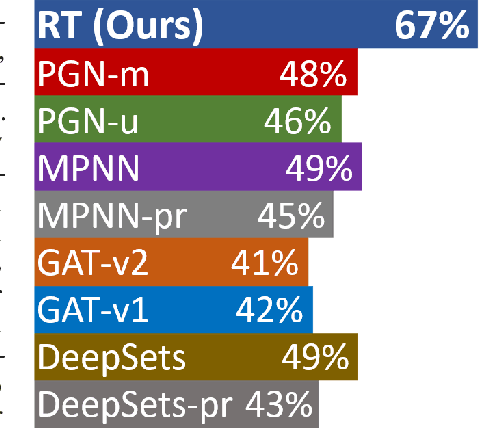
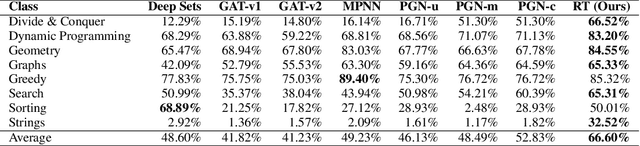
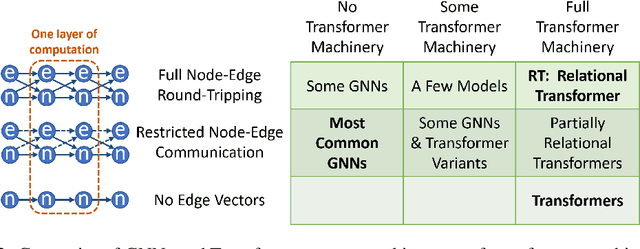
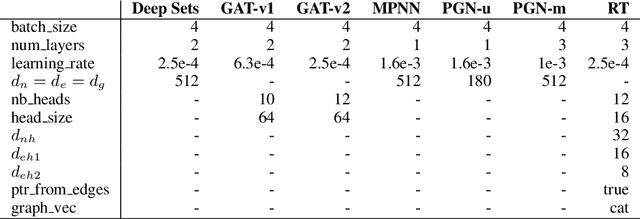
Transformers flexibly operate over sets of real-valued vectors representing task-specific entities and their attributes, where each vector might encode one word-piece token and its position in a sequence, or some piece of information that carries no position at all. But as set processors, transformers are at a disadvantage in reasoning over more general graph-structured data where nodes represent entities and edges represent relations between entities. To address this shortcoming, we generalize transformer attention to consider and update edge vectors in each transformer layer. We evaluate this relational transformer on a diverse array of graph-structured tasks, including the large and challenging CLRS Algorithmic Reasoning Benchmark. There, it dramatically outperforms state-of-the-art graph neural networks expressly designed to reason over graph-structured data. Our analysis demonstrates that these gains are attributable to relational attention's inherent ability to leverage the greater expressivity of graphs over sets.
MoCapAct: A Multi-Task Dataset for Simulated Humanoid Control
Aug 15, 2022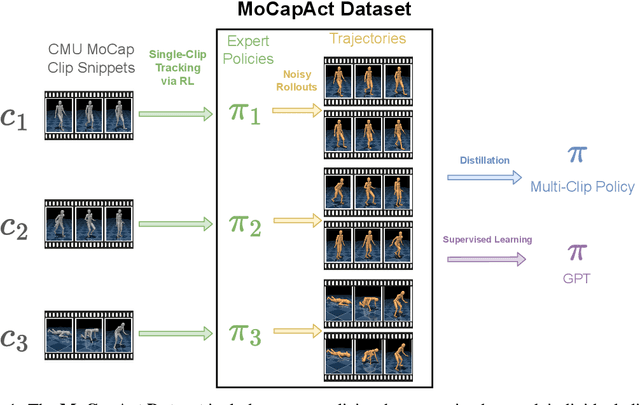
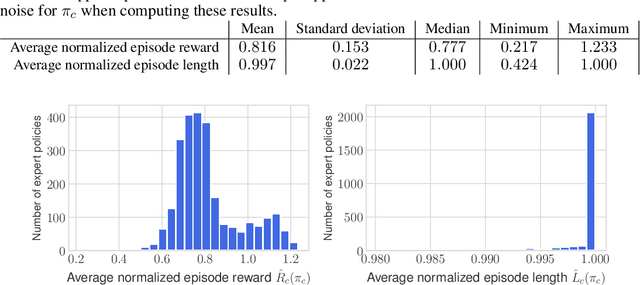
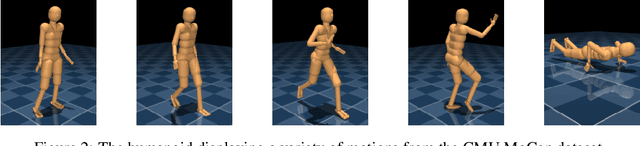
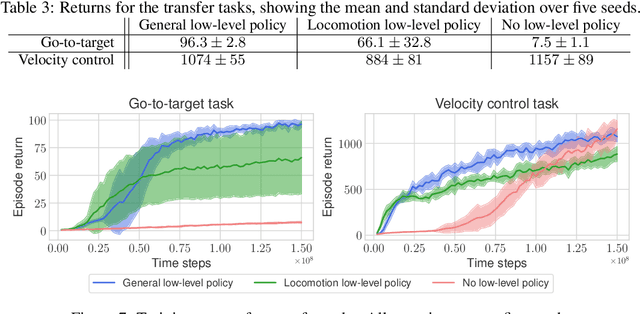
Simulated humanoids are an appealing research domain due to their physical capabilities. Nonetheless, they are also challenging to control, as a policy must drive an unstable, discontinuous, and high-dimensional physical system. One widely studied approach is to utilize motion capture (MoCap) data to teach the humanoid agent low-level skills (e.g., standing, walking, and running) that can then be re-used to synthesize high-level behaviors. However, even with MoCap data, controlling simulated humanoids remains very hard, as MoCap data offers only kinematic information. Finding physical control inputs to realize the demonstrated motions requires computationally intensive methods like reinforcement learning. Thus, despite the publicly available MoCap data, its utility has been limited to institutions with large-scale compute. In this work, we dramatically lower the barrier for productive research on this topic by training and releasing high-quality agents that can track over three hours of MoCap data for a simulated humanoid in the dm_control physics-based environment. We release MoCapAct (Motion Capture with Actions), a dataset of these expert agents and their rollouts, which contain proprioceptive observations and actions. We demonstrate the utility of MoCapAct by using it to train a single hierarchical policy capable of tracking the entire MoCap dataset within dm_control and show the learned low-level component can be re-used to efficiently learn downstream high-level tasks. Finally, we use MoCapAct to train an autoregressive GPT model and show that it can control a simulated humanoid to perform natural motion completion given a motion prompt. Videos of the results and links to the code and dataset are available at https://microsoft.github.io/MoCapAct.
Working Memory Graphs
Nov 17, 2019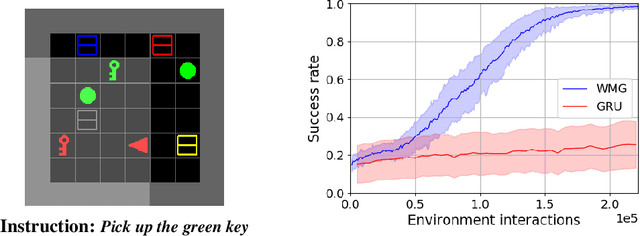
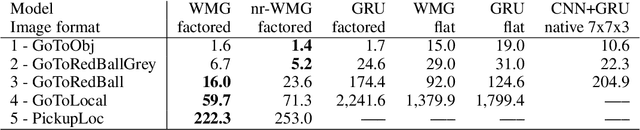
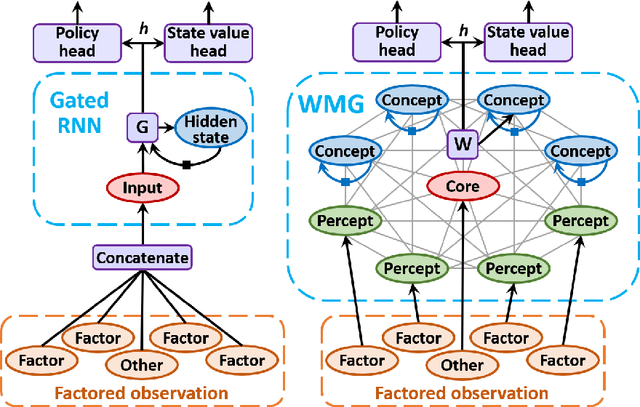
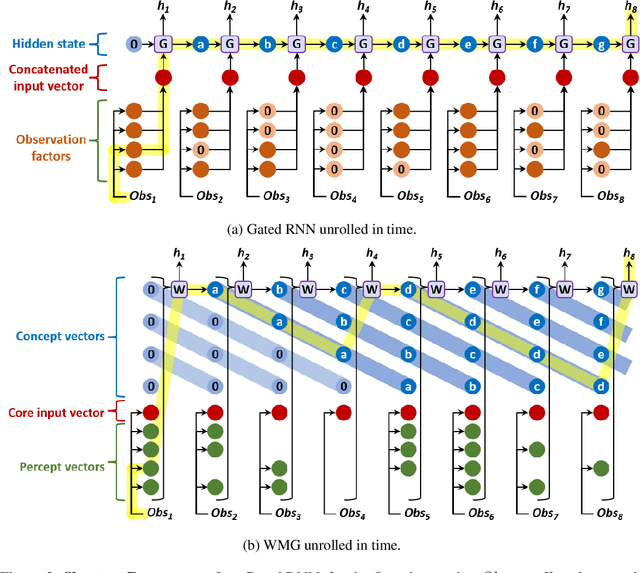
Transformers have increasingly outperformed gated RNNs in obtaining new state-of-the-art results on supervised tasks involving text sequences. Inspired by this trend, we study the question of how Transformer-based models can improve the performance of sequential decision-making agents. We present the Working Memory Graph (WMG), an agent that employs multi-head self-attention to reason over a dynamic set of vectors representing observed and recurrent state. We evaluate WMG in two partially observable environments, one that requires complex reasoning over past observations, and another that features factored observations. We find that WMG significantly outperforms gated RNNs on these tasks, supporting the hypothesis that WMG's inductive bias in favor of learning and leveraging factored representations can dramatically boost sample efficiency in environments featuring such structure.
NAIL: A General Interactive Fiction Agent
Feb 14, 2019
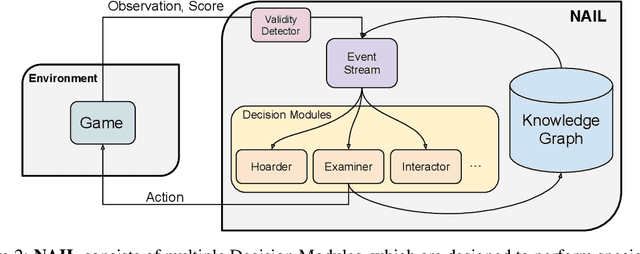
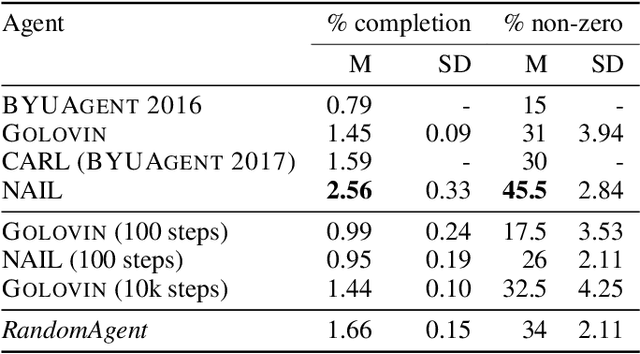
Interactive Fiction (IF) games are complex textual decision making problems. This paper introduces NAIL, an autonomous agent for general parser-based IF games. NAIL won the 2018 Text Adventure AI Competition, where it was evaluated on twenty unseen games. This paper describes the architecture, development, and insights underpinning NAIL's performance.