 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecision over Diversity: High-Precision Reward Generalizes to Robust Instruction Following
Jan 08, 2026A central belief in scaling reinforcement learning with verifiable rewards for instruction following (IF) tasks is that, a diverse mixture of verifiable hard and unverifiable soft constraints is essential for generalizing to unseen instructions. In this work, we challenge this prevailing consensus through a systematic empirical investigation. Counter-intuitively, we find that models trained on hard-only constraints consistently outperform those trained on mixed datasets. Extensive experiments reveal that reward precision, rather than constraint diversity, is the primary driver of effective alignment. The LLM judge suffers from a low recall rate in detecting false response, which leads to severe reward hacking, thereby undermining the benefits of diversity. Furthermore, analysis of the attention mechanism reveals that high-precision rewards develop a transferable meta-skill for IF. Motivated by these insights, we propose a simple yet effective data-centric refinement strategy that prioritizes reward precision. Evaluated on five benchmarks, our approach outperforms competitive baselines by 13.4\% in performance while achieving a 58\% reduction in training time, maintaining strong generalization beyond instruction following. Our findings advocate for a paradigm shift: moving away from the indiscriminate pursuit of data diversity toward high-precision rewards.
Can Movable Antenna-enabled Micro-Mobility Replace UAV-enabled Macro-Mobility? A Physical Layer Security Perspective
Jun 24, 2025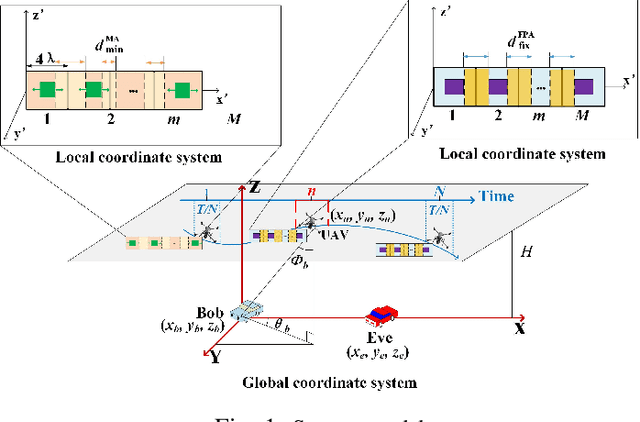
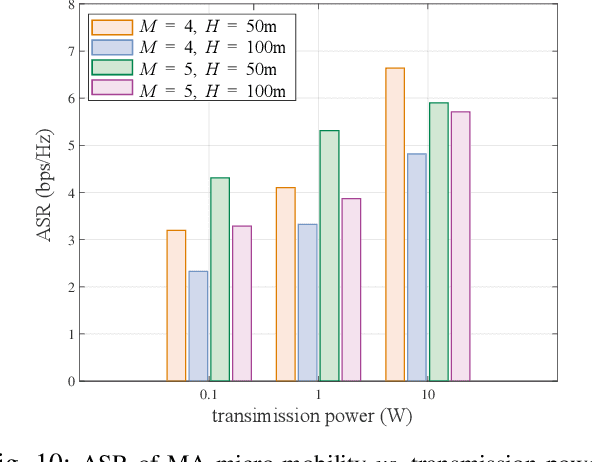
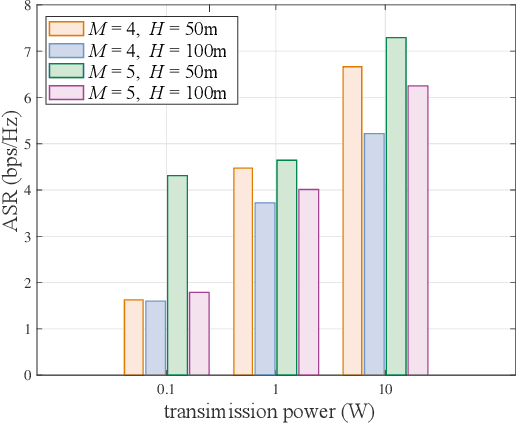
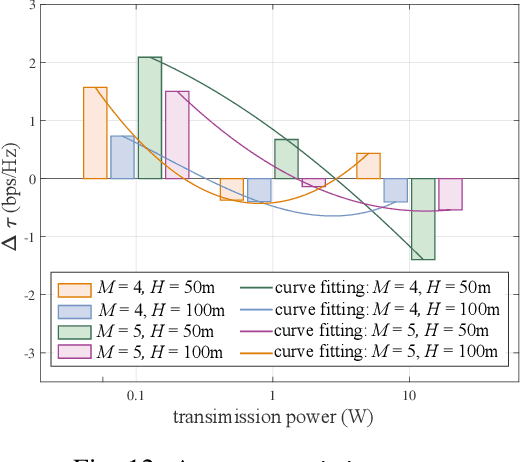
This paper investigates the potential of movable antenna (MA)-enabled micro-mobility to replace UAV-enabled macro-mobility for enhancing physical layer security (PLS) in air-to-ground communications. While UAV trajectory optimization offers high flexibility and Line-of-Sight (LoS) advantages, it suffers from significant energy consumption, latency, and complex trajectory optimization. Conversely, MA technology provides fine-grained spatial reconfiguration (antenna positioning within a confined area) with ultra-low energy overhead and millisecond-scale response, enabling real-time channel manipulation and covert beam steering. To systematically compare these paradigms, we establish a dual-scale mobility framework where a UAV-mounted uniform linear array (ULA) serves as a base station transmitting confidential information to a legitimate user (Bob) in the presence of an eavesdropper (Eve). We formulate non-convex average secrecy rate (ASR) maximization problems for both schemes: 1) MA-based micro-mobility: Jointly optimizing antenna positions and beamforming (BF) vectors under positioning constraints; 2) UAV-based macro-mobility: Jointly optimizing the UAV's trajectory and BF vectors under kinematic constraints. Extensive simulations reveal distinct operational regimes: MA micro-mobility demonstrates significant ASR advantages in low-transmit-power scenarios or under antenna constraints due to its energy-efficient spatial control. Conversely, UAV macro-mobility excels under resource-sufficient conditions (higher power, larger antenna arrays) by leveraging global mobility for optimal positioning. The findings highlight the complementary strengths of both approaches, suggesting hybrid micro-macro mobility as a promising direction for balancing security, energy efficiency, and deployment complexity in future wireless networks.
UAV's Rotor Micro-Doppler Feature Extraction Using Integrated Sensing and Communication Signal: Algorithm Design and Testbed Evaluation
Aug 29, 2024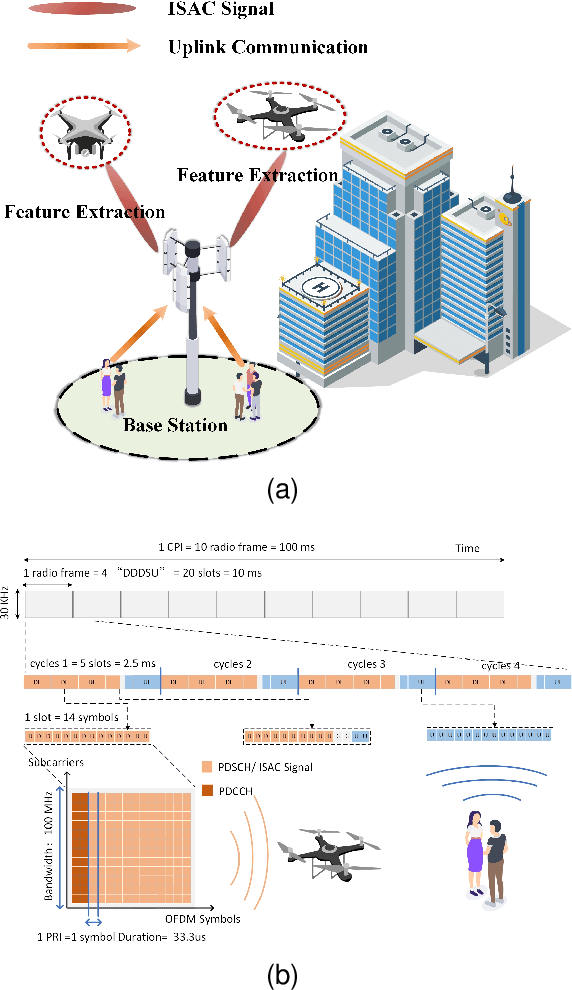
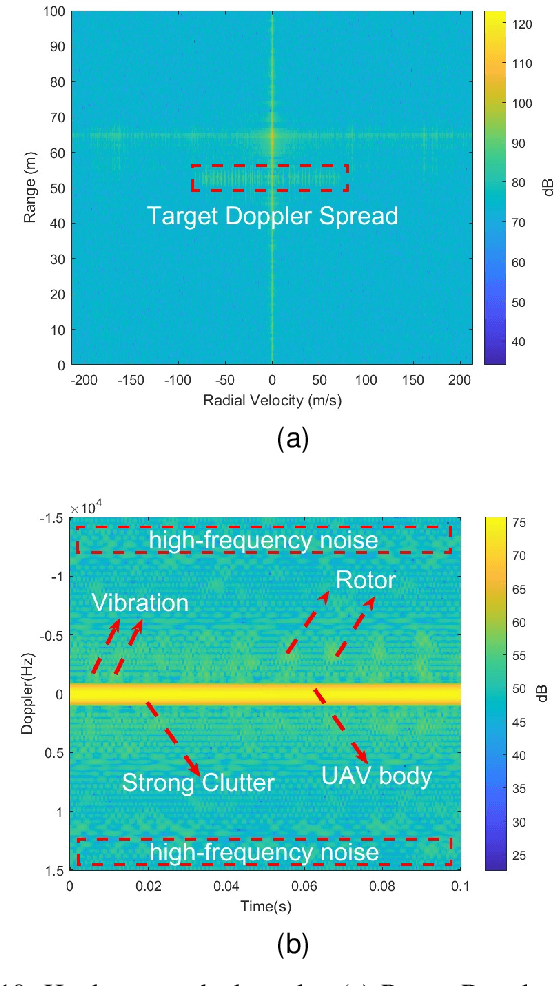
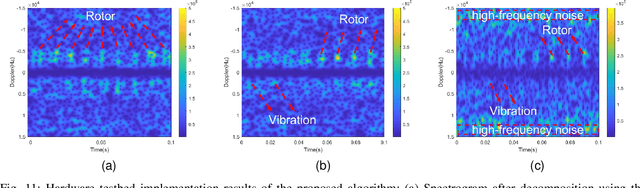
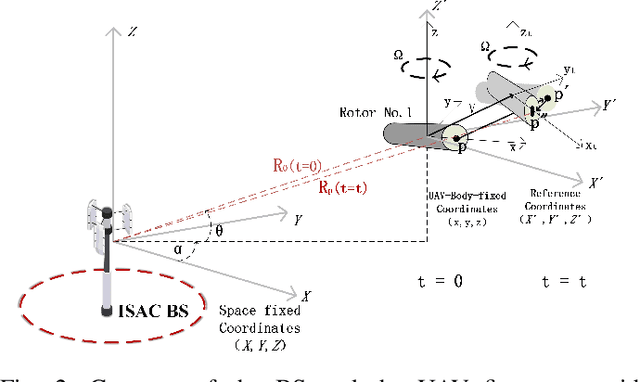
With the rapid application of unmanned aerial vehicles (UAVs) in urban areas, the identification and tracking of hovering UAVs have become critical challenges, significantly impacting the safety of aircraft take-off and landing operations. As a promising technology for 6G mobile systems, integrated sensing and communication (ISAC) can be used to detect high-mobility UAVs with a low deployment cost. The micro-Doppler signals from UAV rotors can be leveraged to address the detection of low-mobility and hovering UAVs using ISAC signals. However, determining whether the frame structure of the ISAC system can be used to identify UAVs, and how to accurately capture the weak rotor micro-Doppler signals of UAVs in complex environments, remain two challenging problems. This paper first proposes a novel frame structure for UAV micro-Doppler extraction and the representation of UAV micro-Doppler signals within the channel state information (CSI). Furthermore, to address complex environments and the interference caused by UAV body vibrations, the rotor micro-Doppler null space pursuit (rmD-NSP) algorithm and the feature extraction algorithm synchroextracting transform (SET) are designed to effectively separate UAV's rotor micro-Doppler signals and enhance their features in the spectrogram. Finally, both simulation and hardware testbed demonstrate that the proposed rmD-NSP algorithm enables the ISAC base station (BS) to accurately and completely extract UAV's rotor micro-Doppler signals. Within a 0.1s observation period, ISAC BS successfully captures eight rotations of the DJI M300 RTK UAV's rotor in urban environments. Compared to the existing AM-FM NSP and NSP signal decomposition algorithms, the integrity of the rotor micro-Doppler features is improved by 60%.
CoCoGesture: Toward Coherent Co-speech 3D Gesture Generation in the Wild
May 27, 2024



Deriving co-speech 3D gestures has seen tremendous progress in virtual avatar animation. Yet, the existing methods often produce stiff and unreasonable gestures with unseen human speech inputs due to the limited 3D speech-gesture data. In this paper, we propose CoCoGesture, a novel framework enabling vivid and diverse gesture synthesis from unseen human speech prompts. Our key insight is built upon the custom-designed pretrain-fintune training paradigm. At the pretraining stage, we aim to formulate a large generalizable gesture diffusion model by learning the abundant postures manifold. Therefore, to alleviate the scarcity of 3D data, we first construct a large-scale co-speech 3D gesture dataset containing more than 40M meshed posture instances across 4.3K speakers, dubbed GES-X. Then, we scale up the large unconditional diffusion model to 1B parameters and pre-train it to be our gesture experts. At the finetune stage, we present the audio ControlNet that incorporates the human voice as condition prompts to guide the gesture generation. Here, we construct the audio ControlNet through a trainable copy of our pre-trained diffusion model. Moreover, we design a novel Mixture-of-Gesture-Experts (MoGE) block to adaptively fuse the audio embedding from the human speech and the gesture features from the pre-trained gesture experts with a routing mechanism. Such an effective manner ensures audio embedding is temporal coordinated with motion features while preserving the vivid and diverse gesture generation. Extensive experiments demonstrate that our proposed CoCoGesture outperforms the state-of-the-art methods on the zero-shot speech-to-gesture generation. The dataset will be publicly available at: https://mattie-e.github.io/GES-X/
Deep Cooperation in ISAC System: Resource, Node and Infrastructure Perspectives
Mar 05, 2024With the mobile communication system evolving into 6th-generation (6G), the Internet of Everything (IoE) is becoming reality, which connects human, big data and intelligent machines to support the intelligent decision making, reconfiguring the traditional industries and human life. The applications of IoE require not only pure communication capability, but also high-accuracy and large-scale sensing capability. With the emerging integrated sensing and communication (ISAC) technique, exploiting the mobile communication system with multi-domain resources, multiple network elements, and large-scale infrastructures to realize cooperative sensing is a crucial approach to satisfy the requirements of high-accuracy and large-scale sensing in IoE. In this article, the deep cooperation in ISAC system including three perspectives is investigated. In the microscopic perspective, namely, within a single node, the cooperation at the resource-level is performed to improve sensing accuracy by fusing the sensing information carried in the time-frequency-space-code multi-domain resources. In the mesoscopic perspective, the sensing accuracy could be improved through the cooperation of multiple nodes including Base Station (BS), User Equipment (UE), and Reconfigurable Intelligence Surface (RIS), etc. In the macroscopic perspective, the massive number of infrastructures from the same operator or different operators could perform cooperative sensing to extend the sensing coverage and improve the sensing continuity. This article may provide a deep and comprehensive view on the cooperative sensing in ISAC system to enhance the performance of sensing, supporting the applications of IoE.
Integrated Sensing and Communication Driven Digital Twin for Intelligent Machine Network
Feb 08, 2024



Intelligent machines (IMs), including industrial machines, unmanned aerial vehicles (UAVs), and unmanned vehicles, etc., could perform effective cooperation in complex environment when they form IM network. The efficient environment sensing and communication are crucial for IM network, enabling the real-time and stable control of IMs. With the emergence of integrated sensing and communication (ISAC) technology, IM network is empowered with ubiquitous sensing capabilities, which is helpful in improving the efficiency of communication and sensing with the mutual benefit of them. However, the massive amount of sensing information brings challenges for the processing, storage and application of sensing information. In this article, ISAC driven digital twin (DT) is proposed for IM network, and the architecture and enabling technologies are revealed. ISAC driven DT structurally stores the sensing information, which is further applied to optimize communication, networking and control schemes of IMs, promoting the widespread applications of IMs.
Communication-Assisted Sensing in 6G Networks
Nov 13, 2023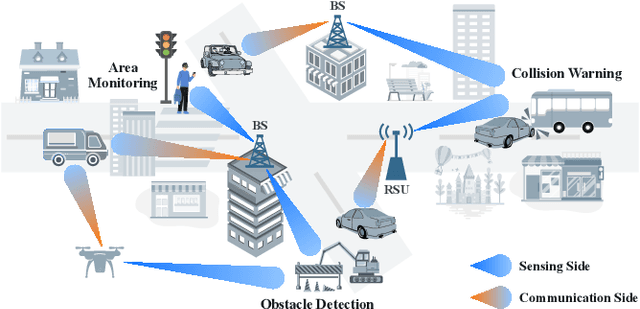
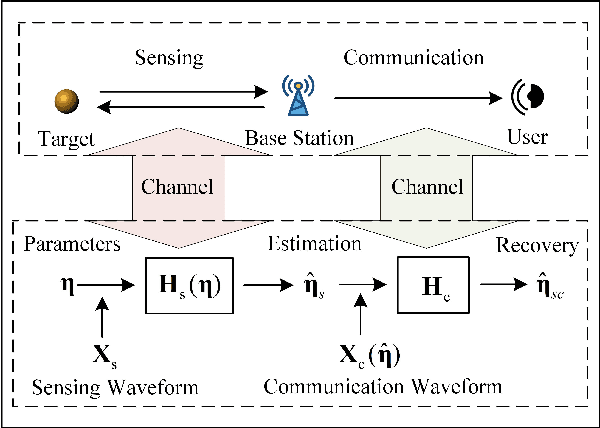
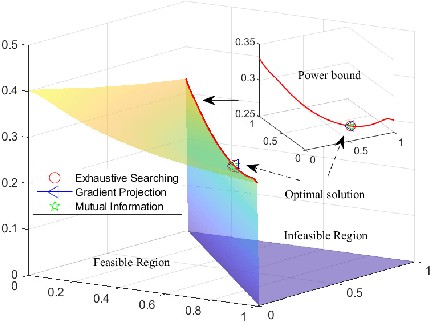
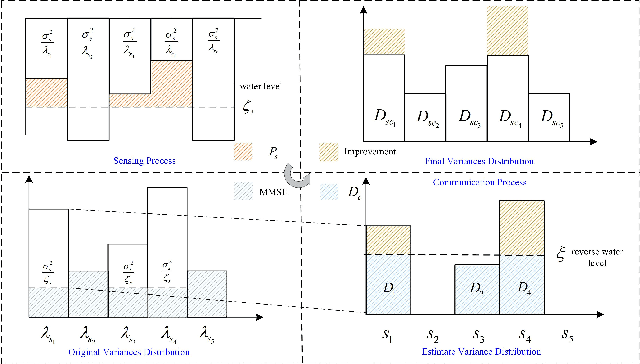
The exploration of coordination gain achieved through the synergy of sensing and communication (S&C) functions plays a vital role in improving the performance of integrated sensing and communication systems. This paper focuses on the optimal waveform design for communication-assisted sensing (CAS) systems within the context of 6G perceptive networks. In the CAS process, the base station actively senses the targets through device-free wireless sensing and simultaneously transmits the pertinent information to end-users. In our research, we establish a CAS framework grounded in the principles of rate-distortion theory and the source-channel separation theorem (SCT) in lossy data transmission. This framework provides a comprehensive understanding of the interplay between distortion, coding rate, and channel capacity. The purpose of waveform design is to minimize the sensing distortion at the user end while adhering to the SCT and power budget constraints. In the context of target response matrix estimation, we propose two distinct waveform strategies: the separated S&C and dual-functional waveform schemes. In the former strategy, we develop a simple one-dimensional search algorithm, shedding light on a notable power allocation tradeoff between the S&C waveform. In the latter scheme, we conceive a heuristic mutual information optimization algorithm for the general case, alongside a modified gradient projection algorithm tailored for the scenarios with independent sensing sub-channels. Additionally, we identify the presence of both subspace tradeoff and water-filling tradeoff. Finally, we validate the effectiveness of the proposed algorithms through numerical simulations.
Joint Localization and Communication Enhancement in Uplink Integrated Sensing and Communications System with Clock Asynchronism
Oct 28, 2023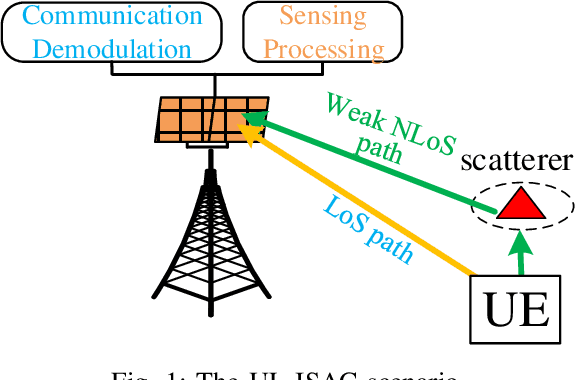
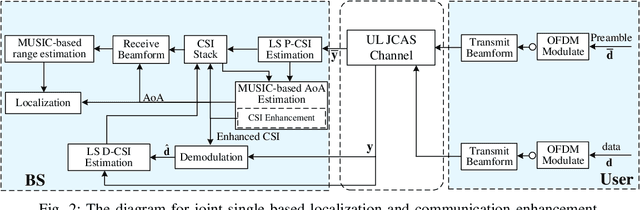

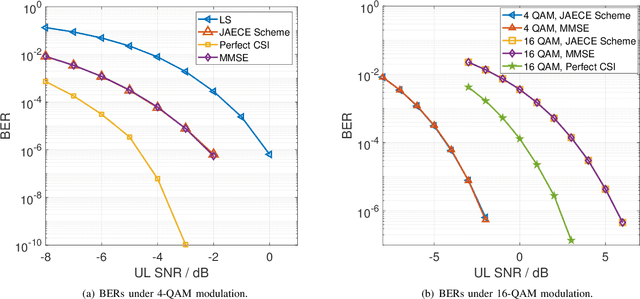
In this paper, we propose a joint single-base localization and communication enhancement scheme for the uplink (UL) integrated sensing and communications (ISAC) system with asynchronism, which can achieve accurate single-base localization of user equipment (UE) and significantly improve the communication reliability despite the existence of timing offset (TO) due to the clock asynchronism between UE and base station (BS). Our proposed scheme integrates the CSI enhancement into the multiple signal classification (MUSIC)-based AoA estimation and thus imposes no extra complexity on the ISAC system. We further exploit a MUSIC-based range estimation method and prove that it can suppress the time-varying TO-related phase terms. Exploiting the AoA and range estimation of UE, we can estimate the location of UE. Finally, we propose a joint CSI and data signals-based localization scheme that can coherently exploit the data and the CSI signals to improve the AoA and range estimation, which further enhances the single-base localization of UE. The extensive simulation results show that the enhanced CSI can achieve equivalent bit error rate performance to the minimum mean square error (MMSE) CSI estimator. The proposed joint CSI and data signals-based localization scheme can achieve decimeter-level localization accuracy despite the existing clock asynchronism and improve the localization mean square error (MSE) by about 8 dB compared with the maximum likelihood (ML)-based benchmark method.
Sensing-assisted Accurate and Fast Beam Management for Cellular-connected mmWave UAV Network
Oct 12, 2023Beam management, including initial access (IA) and beam tracking, is essential to the millimeter-wave Unmanned Aerial Vehicle (UAV) network. However, conventional communication-only and feedback-based schemes suffer a high delay and low accuracy of beam alignment since they only enable the receiver to passively hear the information of the transmitter from the radio domain. This paper presents a novel sensing-assisted beam management approach, the first solution that fully utilizes the information from the visual domain to improve communication performance. We employ both integrated sensing and communication and computer vision techniques and design an extended Kalman filtering method for beam tracking and prediction. Besides, we also propose a novel dual identity association solution to distinguish multiple UAVs in dynamic environments. Real-world experiments and numerical results show that the proposed solution outperforms the conventional methods in IA delay, association accuracy, tracking error, and communication performance.
Toward Trusted and Swift UAV Communication: ISAC-Enabled Dual Identity Mapping
Jun 30, 2023

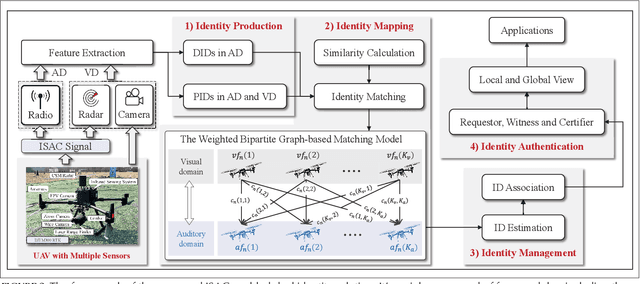

The UAV network has recently emerged as a capable carrier for ubiquitous wireless intelligent communication in the B5G/6G era. Nevertheless, the separation of dual identity raises challenges from the perspective of communication efficiency and security, including tedious communication feedback and malicious Sybil attacks. Meanwhile, thanks to the emerging integrated sensing and communication (ISAC) technology, the sensing ability incorporated in communication advances crucial opportunities for accurately and efficiently mapping identity from dual domains. This tutorial discusses the exciting intersection of ISAC and the future intelligent and efficient UAV network. We first describe the motivation scenario and present the framework of the proposed novel ISAC-enabled dual identity solution. The detailed modules of identity production, mapping, management, and authentication are discussed. By endowing UAVs with an advanced capability: opening their eyes when communicating with each other, we detail three typical applications and the advantages of our proposal. Finally, a series of key enabling techniques, open challenges, and potential solutions for ISAC-enabled dual-domain identity are discussed. This tutorial for the intelligent and efficient UAV network brings new insight on providing dual-domain identity via ISAC technology, with an eye on trusted and swift communication research tailored for the 6G UAV network.
* 9 pages, 5 figures, 1 table