 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing-assisted Accurate and Fast Beam Management for Cellular-connected mmWave UAV Network
Paper and Code
Oct 12, 2023

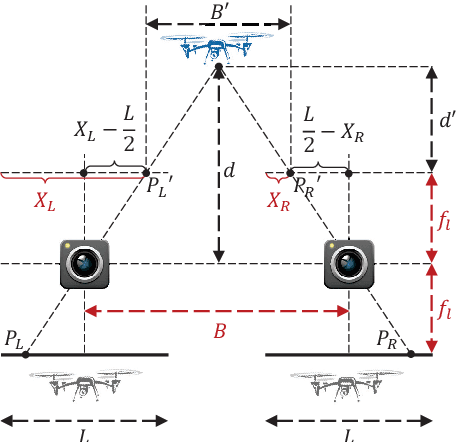
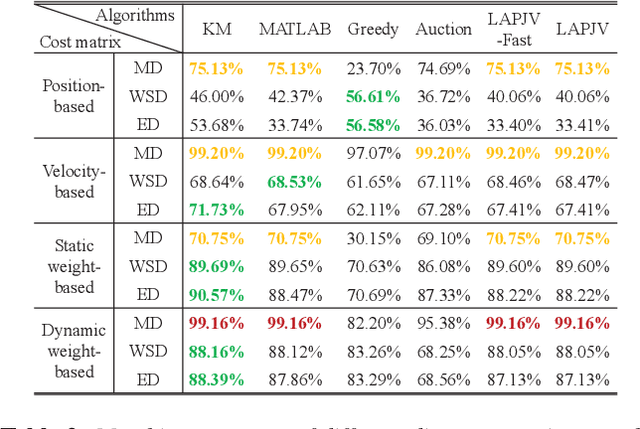
Beam management, including initial access (IA) and beam tracking, is essential to the millimeter-wave Unmanned Aerial Vehicle (UAV) network. However, conventional communication-only and feedback-based schemes suffer a high delay and low accuracy of beam alignment since they only enable the receiver to passively hear the information of the transmitter from the radio domain. This paper presents a novel sensing-assisted beam management approach, the first solution that fully utilizes the information from the visual domain to improve communication performance. We employ both integrated sensing and communication and computer vision techniques and design an extended Kalman filtering method for beam tracking and prediction. Besides, we also propose a novel dual identity association solution to distinguish multiple UAVs in dynamic environments. Real-world experiments and numerical results show that the proposed solution outperforms the conventional methods in IA delay, association accuracy, tracking error, and communication performance.