 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Dino: A plug-and-play framework for unsupervised detection of out-of-distribution objects using prototypes
Apr 11, 2024



Detecting and localising unknown or Out-of-distribution (OOD) objects in any scene can be a challenging task in vision. Particularly, in safety-critical cases involving autonomous systems like automated vehicles or trains. Supervised anomaly segmentation or open-world object detection models depend on training on exhaustively annotated datasets for every domain and still struggle in distinguishing between background and OOD objects. In this work, we present a plug-and-play generalised framework - PRototype-based zero-shot OOD detection Without Labels (PROWL). It is an inference-based method that does not require training on the domain dataset and relies on extracting relevant features from self-supervised pre-trained models. PROWL can be easily adapted to detect OOD objects in any operational design domain by specifying a list of known classes from this domain. PROWL, as an unsupervised method, outperforms other supervised methods trained without auxiliary OOD data on the RoadAnomaly and RoadObstacle datasets provided in SegmentMeIfYouCan (SMIYC) benchmark. We also demonstrate its suitability for other domains such as rail and maritime scenes.
Enhancing Interpretability of Vertebrae Fracture Grading using Human-interpretable Prototypes
Apr 03, 2024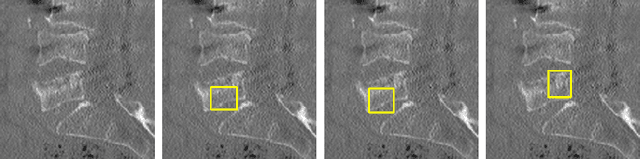
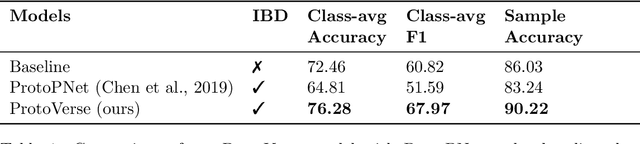
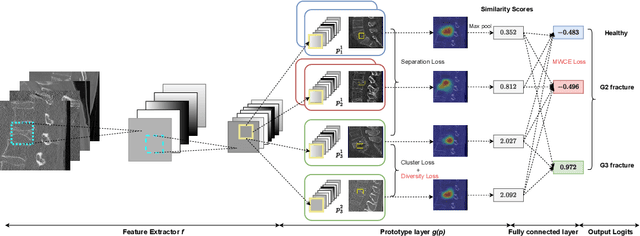

Vertebral fracture grading classifies the severity of vertebral fractures, which is a challenging task in medical imaging and has recently attracted Deep Learning (DL) models. Only a few works attempted to make such models human-interpretable despite the need for transparency and trustworthiness in critical use cases like DL-assisted medical diagnosis. Moreover, such models either rely on post-hoc methods or additional annotations. In this work, we propose a novel interpretable-by-design method, ProtoVerse, to find relevant sub-parts of vertebral fractures (prototypes) that reliably explain the model's decision in a human-understandable way. Specifically, we introduce a novel diversity-promoting loss to mitigate prototype repetitions in small datasets with intricate semantics. We have experimented with the VerSe'19 dataset and outperformed the existing prototype-based method. Further, our model provides superior interpretability against the post-hoc method. Importantly, expert radiologists validated the visual interpretability of our results, showing clinical applicability.
Towards Human-Interpretable Prototypes for Visual Assessment of Image Classification Models
Nov 22, 2022Explaining black-box Artificial Intelligence (AI) models is a cornerstone for trustworthy AI and a prerequisite for its use in safety critical applications such that AI models can reliably assist humans in critical decisions. However, instead of trying to explain our models post-hoc, we need models which are interpretable-by-design built on a reasoning process similar to humans that exploits meaningful high-level concepts such as shapes, texture or object parts. Learning such concepts is often hindered by its need for explicit specification and annotation up front. Instead, prototype-based learning approaches such as ProtoPNet claim to discover visually meaningful prototypes in an unsupervised way. In this work, we propose a set of properties that those prototypes have to fulfill to enable human analysis, e.g. as part of a reliable model assessment case, and analyse such existing methods in the light of these properties. Given a 'Guess who?' game, we find that these prototypes still have a long way ahead towards definite explanations. We quantitatively validate our findings by conducting a user study indicating that many of the learnt prototypes are not considered useful towards human understanding. We discuss about the missing links in the existing methods and present a potential real-world application motivating the need to progress towards truly human-interpretable prototypes.
Is it all a cluster game? -- Exploring Out-of-Distribution Detection based on Clustering in the Embedding Space
Mar 16, 2022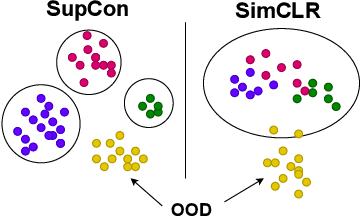
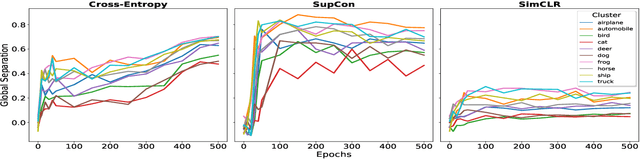
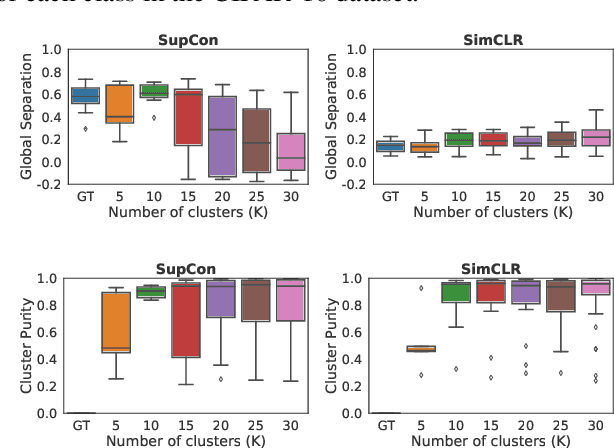
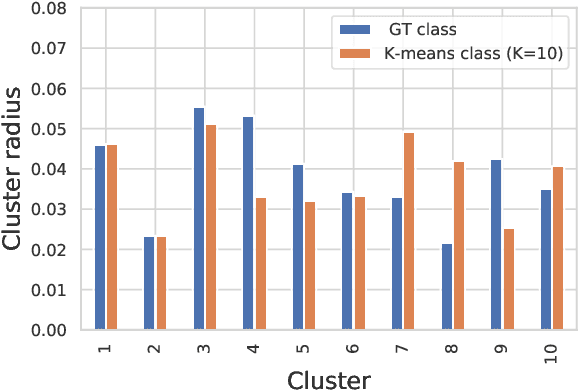
It is essential for safety-critical applications of deep neural networks to determine when new inputs are significantly different from the training distribution. In this paper, we explore this out-of-distribution (OOD) detection problem for image classification using clusters of semantically similar embeddings of the training data and exploit the differences in distance relationships to these clusters between in- and out-of-distribution data. We study the structure and separation of clusters in the embedding space and find that supervised contrastive learning leads to well-separated clusters while its self-supervised counterpart fails to do so. In our extensive analysis of different training methods, clustering strategies, distance metrics, and thresholding approaches, we observe that there is no clear winner. The optimal approach depends on the model architecture and selected datasets for in- and out-of-distribution. While we could reproduce the outstanding results for contrastive training on CIFAR-10 as in-distribution data, we find standard cross-entropy paired with cosine similarity outperforms all contrastive training methods when training on CIFAR-100 instead. Cross-entropy provides competitive results as compared to expensive contrastive training methods.
OODformer: Out-Of-Distribution Detection Transformer
Jul 19, 2021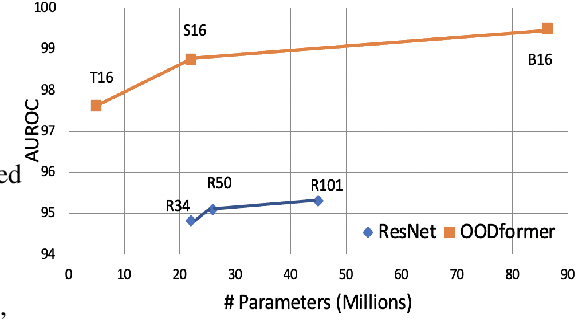
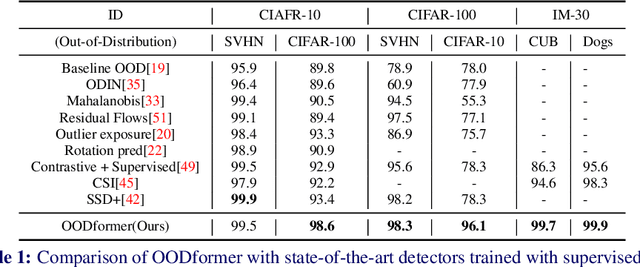
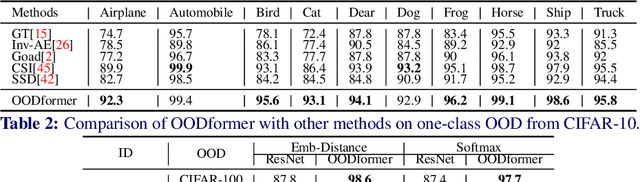
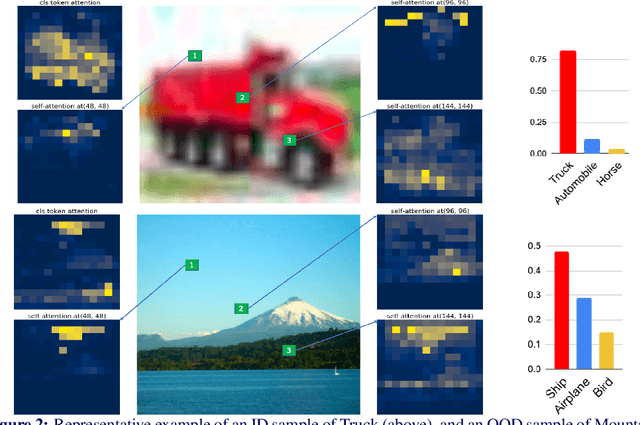
A serious problem in image classification is that a trained model might perform well for input data that originates from the same distribution as the data available for model training, but performs much worse for out-of-distribution (OOD) samples. In real-world safety-critical applications, in particular, it is important to be aware if a new data point is OOD. To date, OOD detection is typically addressed using either confidence scores, auto-encoder based reconstruction, or by contrastive learning. However, the global image context has not yet been explored to discriminate the non-local objectness between in-distribution and OOD samples. This paper proposes a first-of-its-kind OOD detection architecture named OODformer that leverages the contextualization capabilities of the transformer. Incorporating the trans\-former as the principal feature extractor allows us to exploit the object concepts and their discriminate attributes along with their co-occurrence via visual attention. Using the contextualised embedding, we demonstrate OOD detection using both class-conditioned latent space similarity and a network confidence score. Our approach shows improved generalizability across various datasets. We have achieved a new state-of-the-art result on CIFAR-10/-100 and ImageNet30.
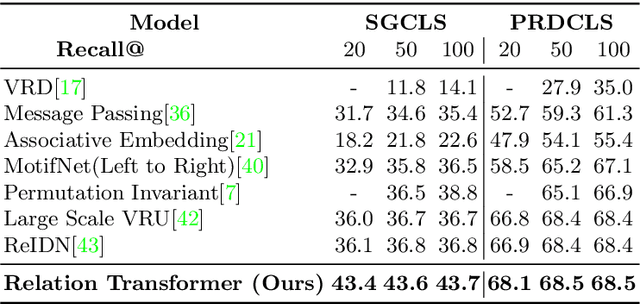
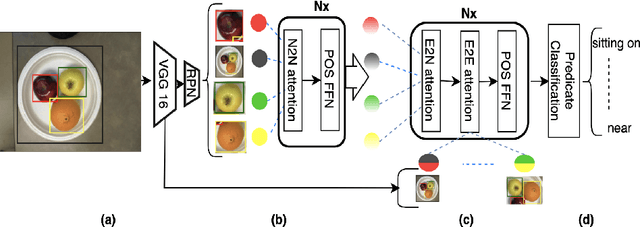
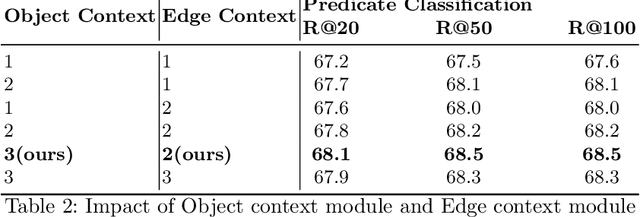
Scenes and Surroundings: Scene Graph Generation using Relation Transformer
Jul 12, 2021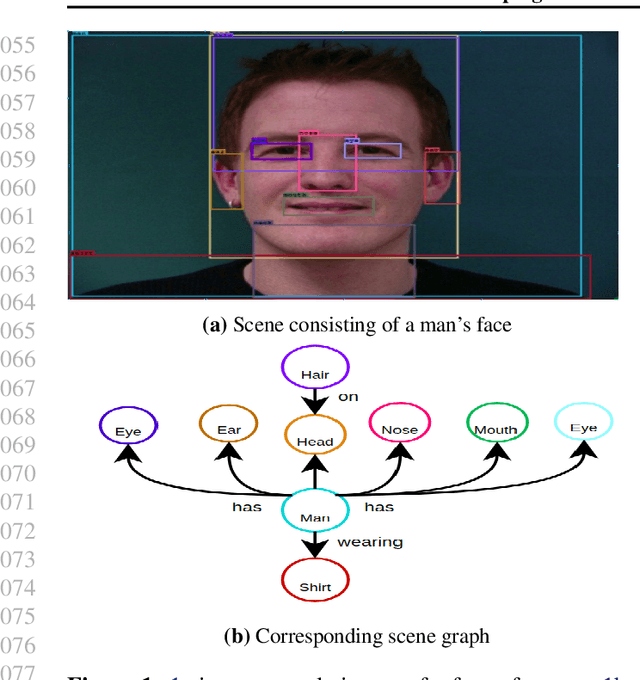
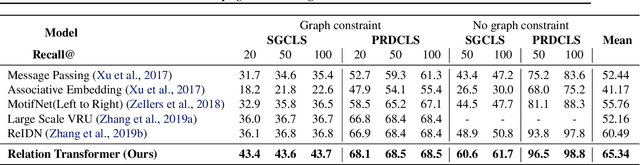
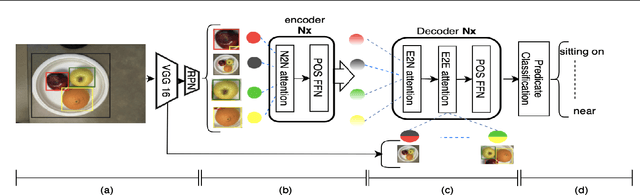
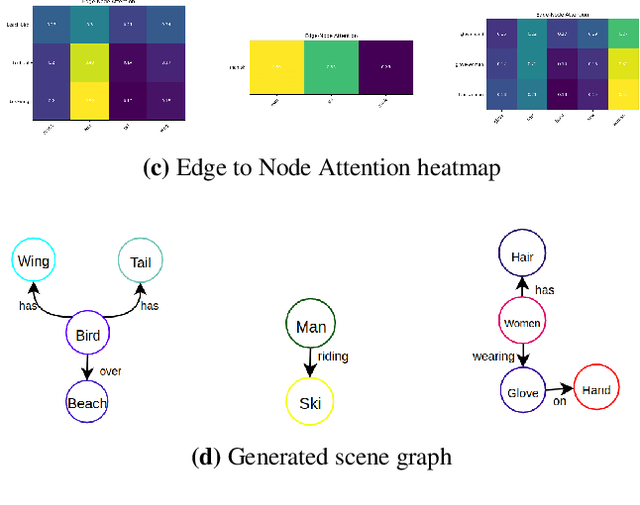
Identifying objects in an image and their mutual relationships as a scene graph leads to a deep understanding of image content. Despite the recent advancement in deep learning, the detection and labeling of visual object relationships remain a challenging task. This work proposes a novel local-context aware architecture named relation transformer, which exploits complex global objects to object and object to edge (relation) interactions. Our hierarchical multi-head attention-based approach efficiently captures contextual dependencies between objects and predicts their relationships. In comparison to state-of-the-art approaches, we have achieved an overall mean \textbf{4.85\%} improvement and a new benchmark across all the scene graph generation tasks on the Visual Genome dataset.
Relation Transformer Network
Apr 13, 2020
The identification of objects in an image, together with their mutual relationships, can lead to a deep understanding of image content. Despite all the recent advances in deep learning, in particular, the detection and labeling of visual object relationships remain a challenging task. In this work, we present the Relation Transformer Network, which is a customized transformer-based architecture that models complex object to object and edge to object interactions, by taking into account global context. Our hierarchical multi-head attention-based approach efficiently models and predicts dependencies between objects and their contextual relationships. In comparison to another state of the art approaches, we achieve an absolute mean 3.72% improvement in performance on the Visual Genome dataset.