 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-UNETR for PSMA PET/CT Lesion Segmentation: Automated Tumor Quantification and Overall Survival Stratification in Prostate Cancer
Jun 16, 2026Introduction: To develop and evaluate Fine-UNETR, a Vision Transformer-based architecture for automated segmentation of PSMA-avid lesions on whole-body PET/CT, and to assess clinical utility of AI-derived tumor burden biomarkers for overall survival stratification in radioligand therapy. Methods: In this retrospective study, 373 PSMA PET/CT scans (mean age, 71+-8 years) from patients with prostate cancer were analyzed. Fine-UNETR, a modified UNETR with 8x8x8 voxel patch embedding and axial sliding window training, was trained on 299 scans and validated on 74 scans. Overall survival stratification was assessed in an independent cohort of 67 pre-radioligand therapy patients using Kaplan-Meier analysis and log-rank testing. External validation was performed on 192 cases from the AutoPET IV PSMA PET/CT dataset. Results: Fine-UNETR achieved a Dice similarity coefficient (DSC) of 66.63%, sensitivity of 70.27%, precision of 67.77%, and a lesion detection rate of 79.53% (96.05% for lesions with SUVmax >= 5). On the external validation dataset, the model achieved a DSC of 44.11% and a lesion detection rate of 87.18%, indicating that lesion detection performance was preserved despite reduced voxel-level overlap. AI-derived biomarkers showed excellent agreement with ground truth (total tumor volume: r=0.984; total lesion uptake: r=0.989; lesion count: r=0.960). In the clinical cohort, total tumor volume (p=0.0019), SUVmax (p=0.014), and SUVmean (p=0.016) significantly stratified overall survival. Conclusion: Fine-UNETR enables accurate automated whole-body PSMA lesion segmentation and tumor burden quantification. Performance on an external dataset demonstrates robustness despite evidence of domain shift. AI-derived biomarkers significantly stratified overall survival in a pre-radioligand therapy cohort, supporting the clinical utility of automated PSMA PET/CT quantification for prognostication.
Mixed Supervision of Histopathology Improves Prostate Cancer Classification from MRI
Dec 13, 2022



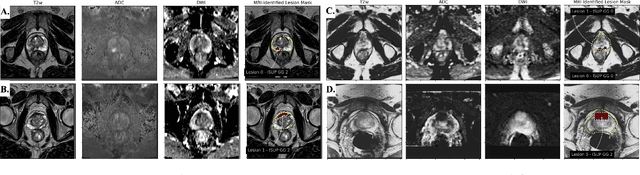
Non-invasive prostate cancer detection from MRI has the potential to revolutionize patient care by providing early detection of clinically-significant disease (ISUP grade group >= 2), but has thus far shown limited positive predictive value. To address this, we present an MRI-based deep learning method for predicting clinically significant prostate cancer applicable to a patient population with subsequent ground truth biopsy results ranging from benign pathology to ISUP grade group~5. Specifically, we demonstrate that mixed supervision via diverse histopathological ground truth improves classification performance despite the cost of reduced concordance with image-based segmentation. That is, where prior approaches have utilized pathology results as ground truth derived from targeted biopsies and whole-mount prostatectomy to strongly supervise the localization of clinically significant cancer, our approach also utilizes weak supervision signals extracted from nontargeted systematic biopsies with regional localization to improve overall performance. Our key innovation is performing regression by distribution rather than simply by value, enabling use of additional pathology findings traditionally ignored by deep learning strategies. We evaluated our model on a dataset of 973 (testing n=160) multi-parametric prostate MRI exams collected at UCSF from 2015-2018 followed by MRI/ultrasound fusion (targeted) biopsy and systematic (nontargeted) biopsy of the prostate gland, demonstrating that deep networks trained with mixed supervision of histopathology can significantly exceed the performance of the Prostate Imaging-Reporting and Data System (PI-RADS) clinical standard for prostate MRI interpretation.
Physics-driven Deep Learning for PET/MRI
Jun 11, 2022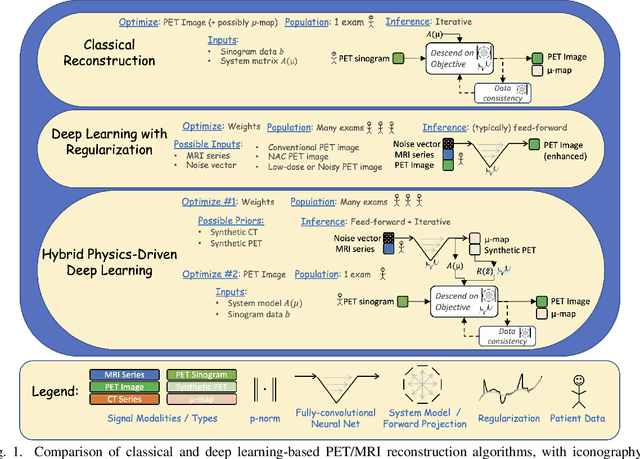
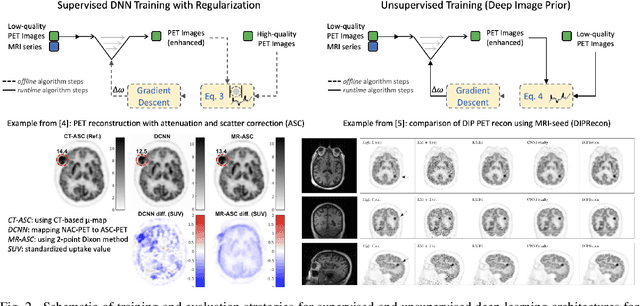
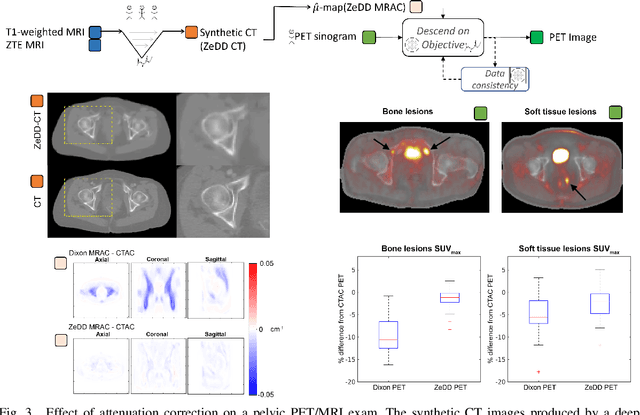
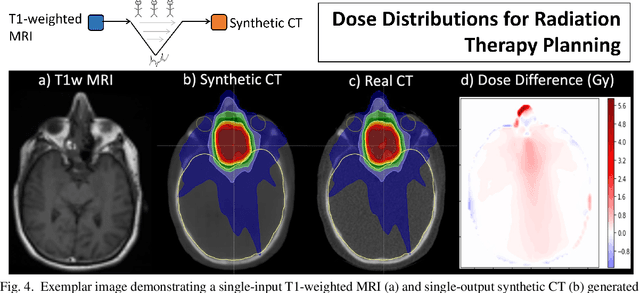
In this paper, we review physics- and data-driven reconstruction techniques for simultaneous positron emission tomography (PET) / magnetic resonance imaging (MRI) systems, which have significant advantages for clinical imaging of cancer, neurological disorders, and heart disease. These reconstruction approaches utilize priors, either structural or statistical, together with a physics-based description of the PET system response. However, due to the nested representation of the forward problem, direct PET/MRI reconstruction is a nonlinear problem. We elucidate how a multi-faceted approach accommodates hybrid data- and physics-driven machine learning for reconstruction of 3D PET/MRI, summarizing important deep learning developments made in the last 5 years to address attenuation correction, scattering, low photon counts, and data consistency. We also describe how applications of these multi-modality approaches extend beyond PET/MRI to improving accuracy in radiation therapy planning. We conclude by discussing opportunities for extending the current state-of-the-art following the latest trends in physics- and deep learning-based computational imaging and next-generation detector hardware.
Synthetic PET via Domain Translation of 3D MRI
Jun 11, 2022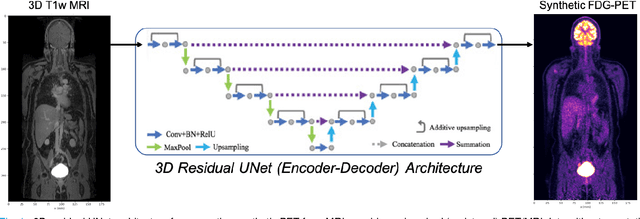
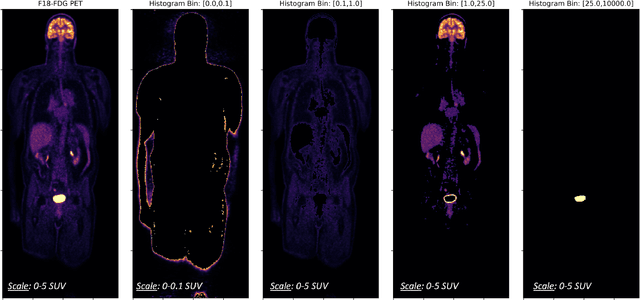
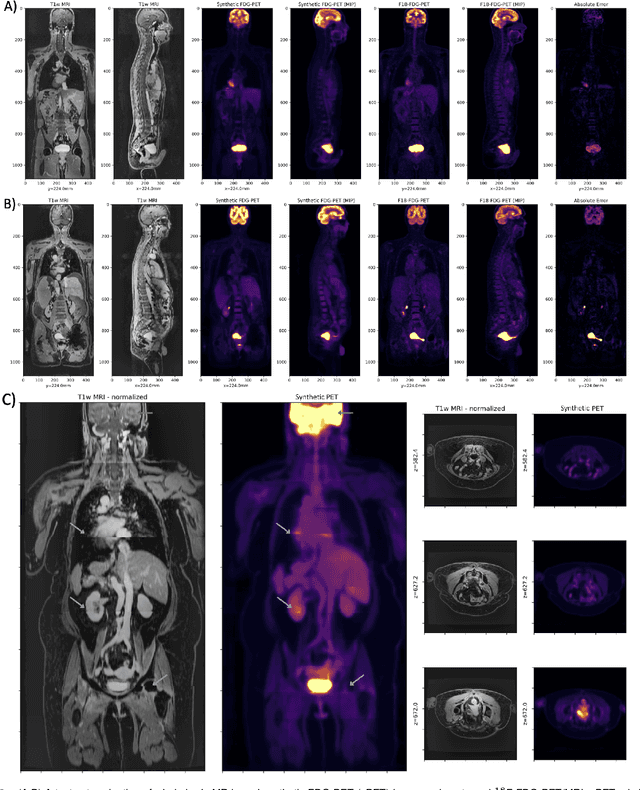
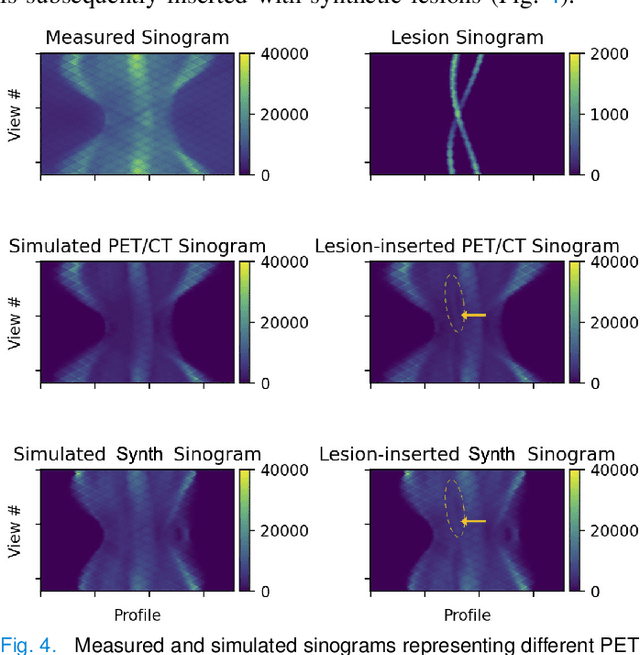
Historically, patient datasets have been used to develop and validate various reconstruction algorithms for PET/MRI and PET/CT. To enable such algorithm development, without the need for acquiring hundreds of patient exams, in this paper we demonstrate a deep learning technique to generate synthetic but realistic whole-body PET sinograms from abundantly-available whole-body MRI. Specifically, we use a dataset of 56 $^{18}$F-FDG-PET/MRI exams to train a 3D residual UNet to predict physiologic PET uptake from whole-body T1-weighted MRI. In training we implemented a balanced loss function to generate realistic uptake across a large dynamic range and computed losses along tomographic lines of response to mimic the PET acquisition. The predicted PET images are forward projected to produce synthetic PET time-of-flight (ToF) sinograms that can be used with vendor-provided PET reconstruction algorithms, including using CT-based attenuation correction (CTAC) and MR-based attenuation correction (MRAC). The resulting synthetic data recapitulates physiologic $^{18}$F-FDG uptake, e.g. high uptake localized to the brain and bladder, as well as uptake in liver, kidneys, heart and muscle. To simulate abnormalities with high uptake, we also insert synthetic lesions. We demonstrate that this synthetic PET data can be used interchangeably with real PET data for the PET quantification task of comparing CT and MR-based attenuation correction methods, achieving $\leq 7.6\%$ error in mean-SUV compared to using real data. These results together show that the proposed synthetic PET data pipeline can be reasonably used for development, evaluation, and validation of PET/MRI reconstruction methods.
Federated Learning with Research Prototypes for Multi-Center MRI-based Detection of Prostate Cancer with Diverse Histopathology
Jun 11, 2022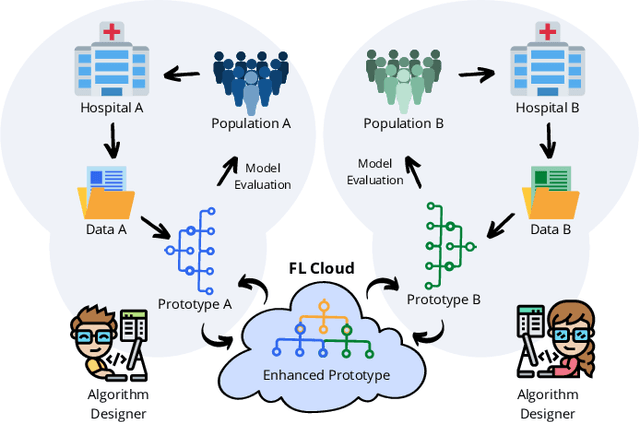
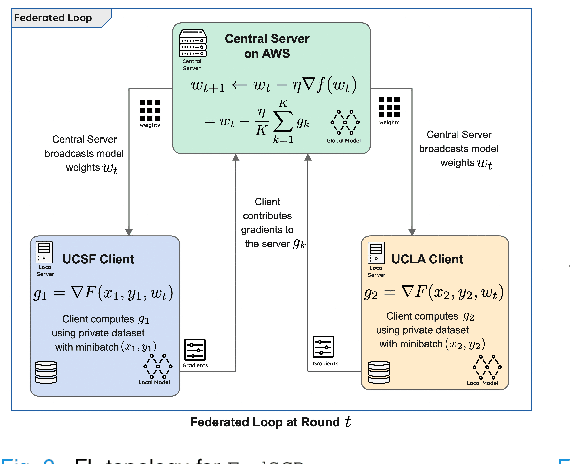
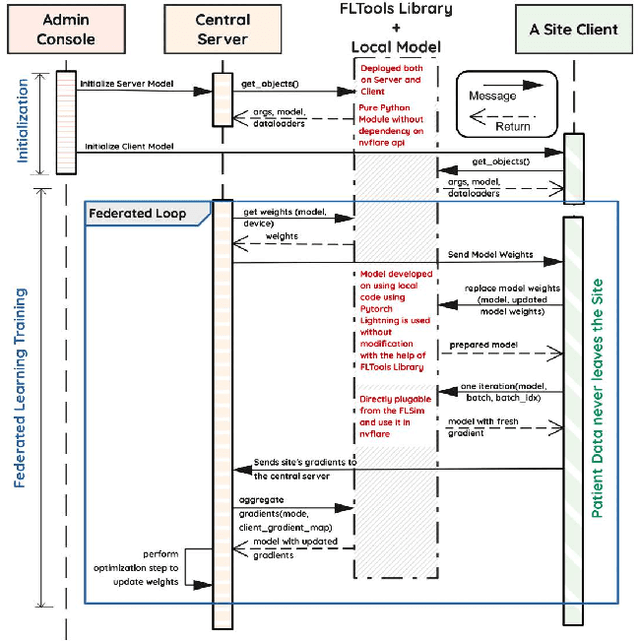
Early prostate cancer detection and staging from MRI are extremely challenging tasks for both radiologists and deep learning algorithms, but the potential to learn from large and diverse datasets remains a promising avenue to increase their generalization capability both within- and across clinics. To enable this for prototype-stage algorithms, where the majority of existing research remains, in this paper we introduce a flexible federated learning framework for cross-site training, validation, and evaluation of deep prostate cancer detection algorithms. Our approach utilizes an abstracted representation of the model architecture and data, which allows unpolished prototype deep learning models to be trained without modification using the NVFlare federated learning framework. Our results show increases in prostate cancer detection and classification accuracy using a specialized neural network model and diverse prostate biopsy data collected at two University of California research hospitals, demonstrating the efficacy of our approach in adapting to different datasets and improving MR-biomarker discovery. We open-source our FLtools system, which can be easily adapted to other deep learning projects for medical imaging.
Scan-specific Self-supervised Bayesian Deep Non-linear Inversion for Undersampled MRI Reconstruction
Mar 01, 2022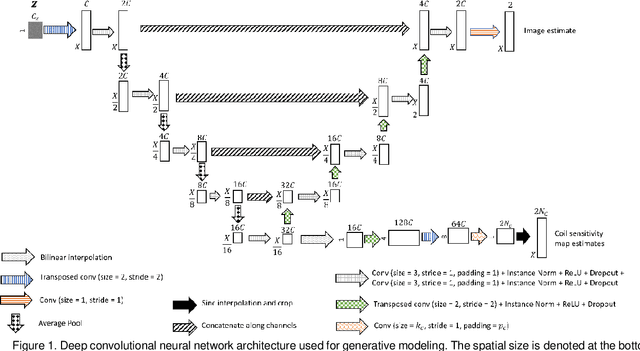
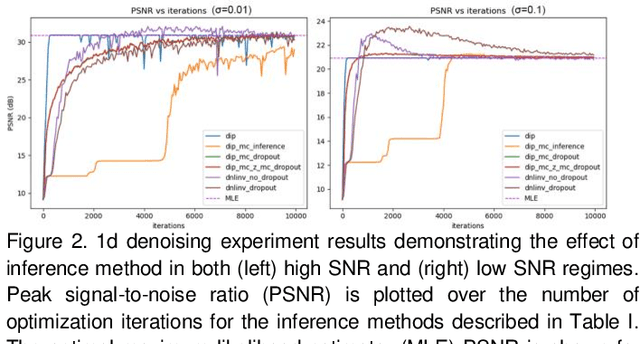
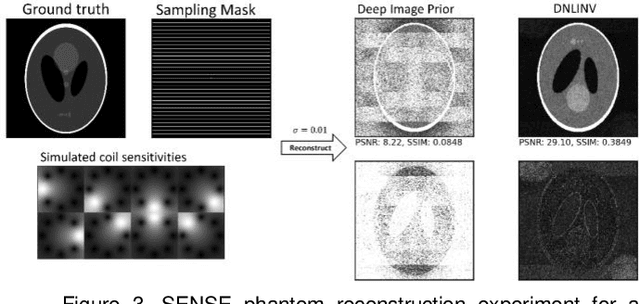
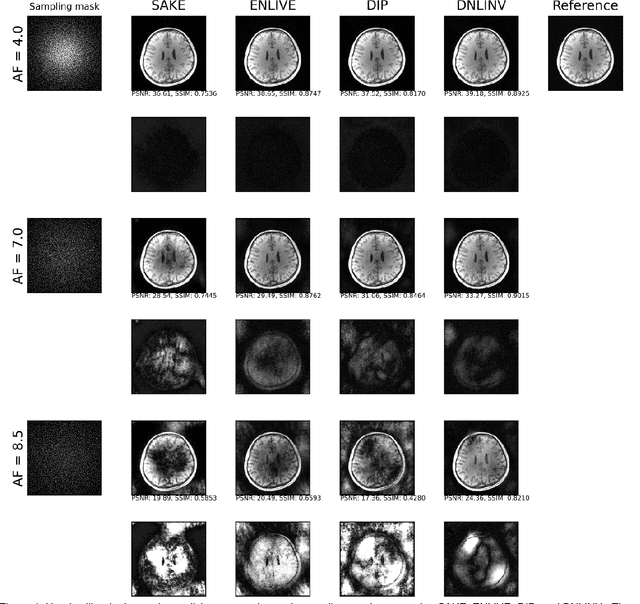
Magnetic resonance imaging is subject to slow acquisition times due to the inherent limitations in data sampling. Recently, supervised deep learning has emerged as a promising technique for reconstructing sub-sampled MRI. However, supervised deep learning requires a large dataset of fully-sampled data. Although unsupervised or self-supervised deep learning methods have emerged to address the limitations of supervised deep learning approaches, they still require a database of images. In contrast, scan-specific deep learning methods learn and reconstruct using only the sub-sampled data from a single scan. Current scan-specific approaches require a fully-sampled auto calibration scan region in k-space that cost additional scan time. Here, we introduce Scan-Specific Self-Supervised Bayesian Deep Non-Linear Inversion (DNLINV) that does not require an auto calibration scan region. DNLINV utilizes a deep image prior-type generative modeling approach and relies on approximate Bayesian inference to regularize the deep convolutional neural network. We demonstrate our approach on several anatomies, contrasts, and sampling patterns and show improved performance over existing approaches in scan-specific calibrationless parallel imaging and compressed sensing.
Utilizing the Structure of the Curvelet Transform with Compressed Sensing
Jul 24, 2021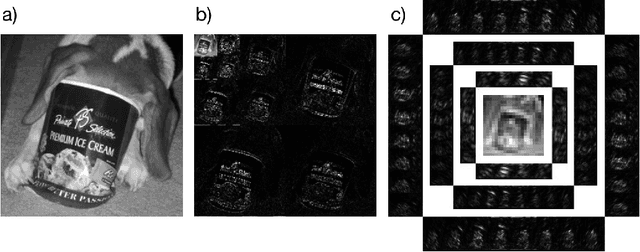
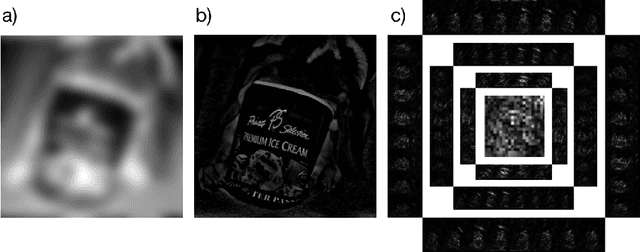
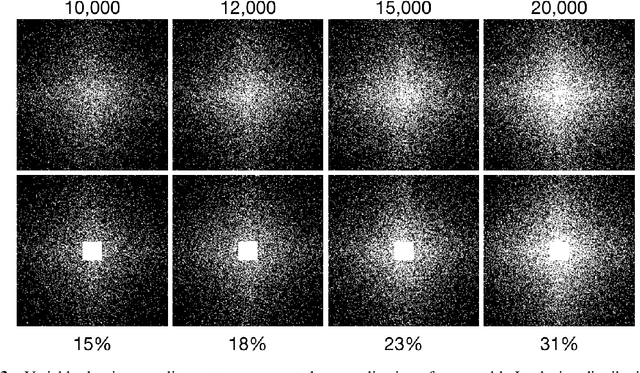
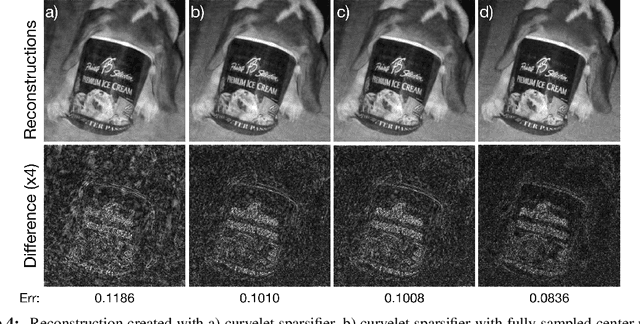
The discrete curvelet transform decomposes an image into a set of fundamental components that are distinguished by direction and size as well as a low-frequency representation. The curvelet representation is approximately sparse; thus, it is a useful sparsifying transformation to be used with compressed sensing. Although the curvelet transform of a natural image is sparse, the low-frequency portion is not. This manuscript presents a method to modify the sparsifying transformation to take advantage of this fact. Instead of relying on sparsity for this low-frequency estimate, the Nyquist-Shannon theorem specifies a square region to be collected centered on the $0$ frequency. A Basis Pursuit Denoising problem is solved to determine the missing details after modifying the sparisfying transformation to take advantage of the known fully sampled region. Finally, by taking advantage of this structure with a redundant dictionary comprised of both the wavelet and curvelet transforms, additional gains in quality are achieved.
Least Squares Optimal Density Compensation for the Gridding Non-uniform Discrete Fourier Transform
Jun 16, 2021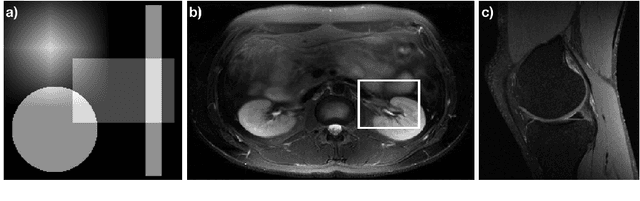
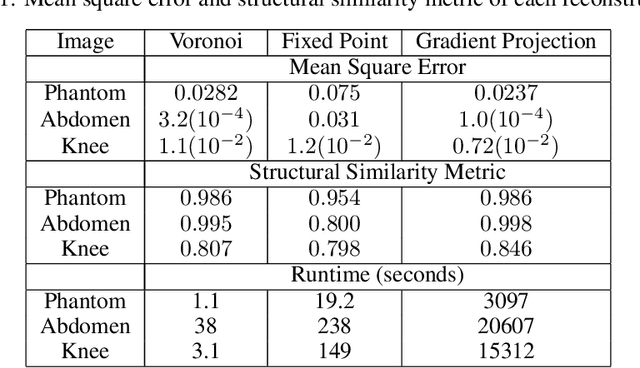
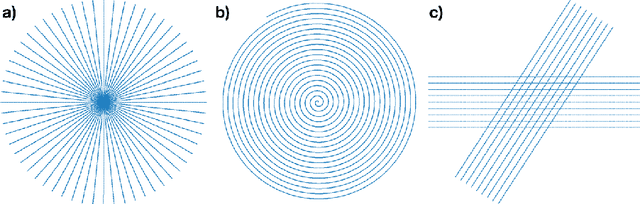
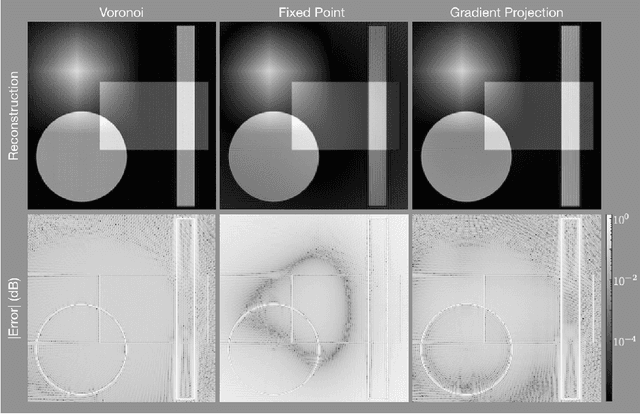
The Gridding algorithm has shown great utility for reconstructing images from non-uniformly spaced samples in the Fourier domain in several imaging modalities. Due to the non-uniform spacing, some correction for the variable density of the samples must be made. Existing methods for generating density compensation values are either sub-optimal or only consider a finite set of points (a set of measure 0) in the optimization. This manuscript presents the first density compensation algorithm for a general trajectory that takes into account the point spread function over a set of non-zero measure. We show that the images reconstructed with Gridding using the density compensation values of this method are of superior quality when compared to density compensation weights determined in other ways. Results are shown with a numerical phantom and with magnetic resonance images of the abdomen and the knee.
Anisotropic field-of-views in radial imaging
Jan 12, 2021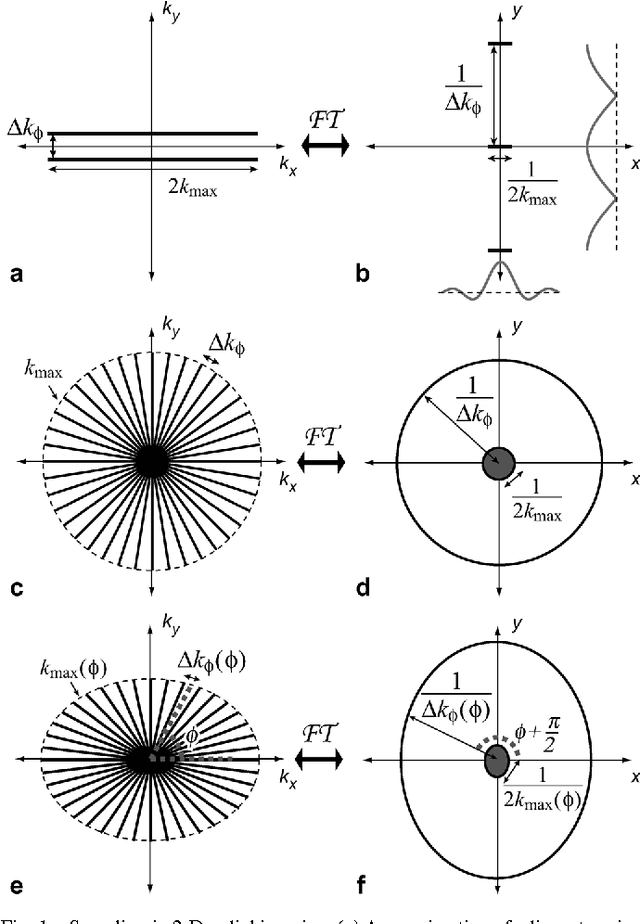
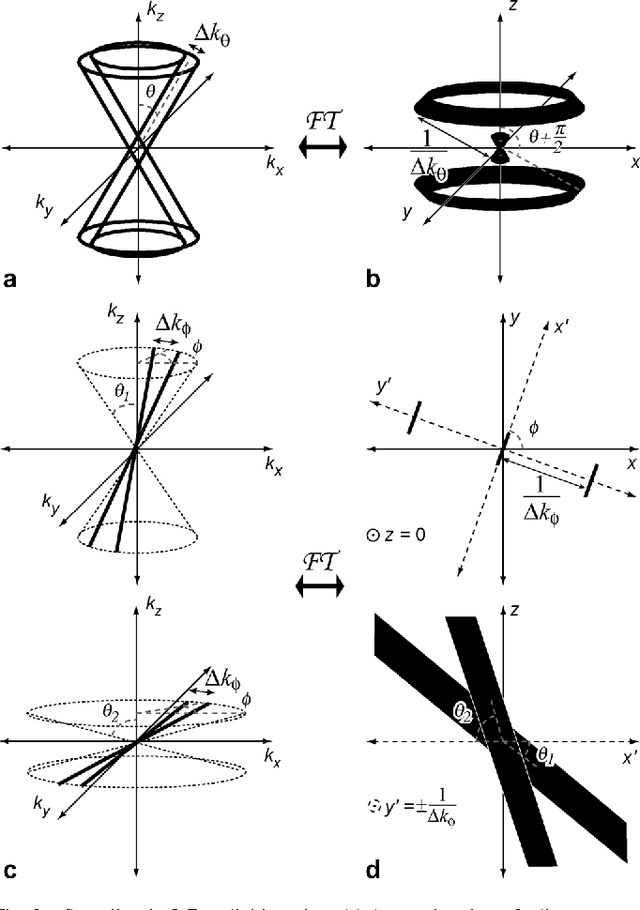
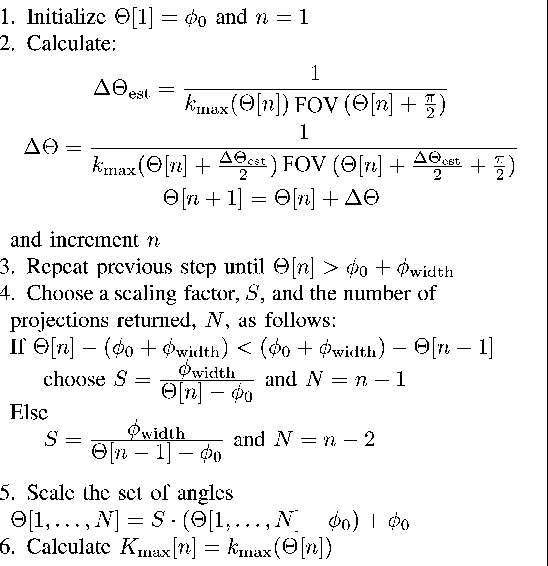

Radial imaging techniques, such as projection-reconstruction (PR), are used in magnetic resonance imaging (MRI) for dynamic imaging, angiography, and short-imaging. They are robust to flow and motion, have diffuse aliasing patterns, and support short readouts and echo times. One drawback is that standard implementations do not support anisotropic field-of-view (FOV) shapes, which are used to match the imaging parameters to the object or region-of-interest. A set of fast, simple algorithms for 2-D and 3-D PR, and 3-D cones acquisitions are introduced that match the sampling density in frequency space to the desired FOV shape. Tailoring the acquisitions allows for reduction of aliasing artifacts in undersampled applications or scan time reductions without introducing aliasing in fully-sampled applications. It also makes possible new radial imaging applications that were previously unsuitable, such as imaging elongated regions or thin slabs. 2-D PR longitudinal leg images and thin-slab, single breath-hold 3-D PR abdomen images, both with isotropic resolution, demonstrate these new possibilities. No scan time to volume efficiency is lost by using anisotropic FOVs. The acquisition trajectories can be computed on a scan by scan basis.
Predicting Generalization in Deep Learning via Local Measures of Distortion
Dec 16, 2020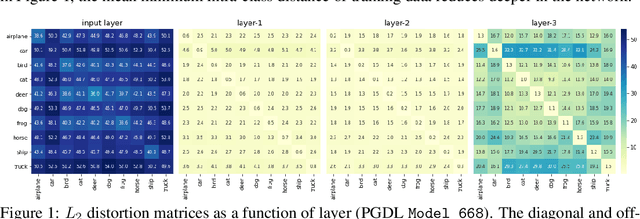
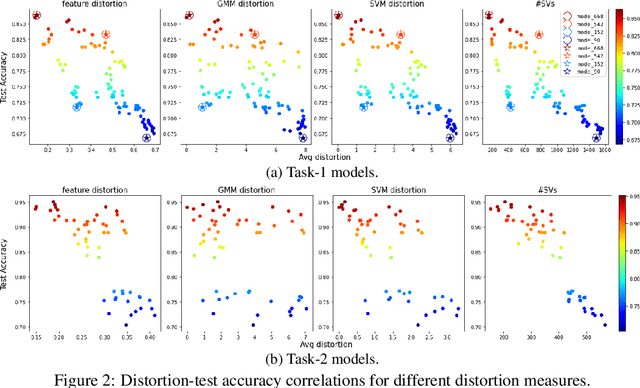
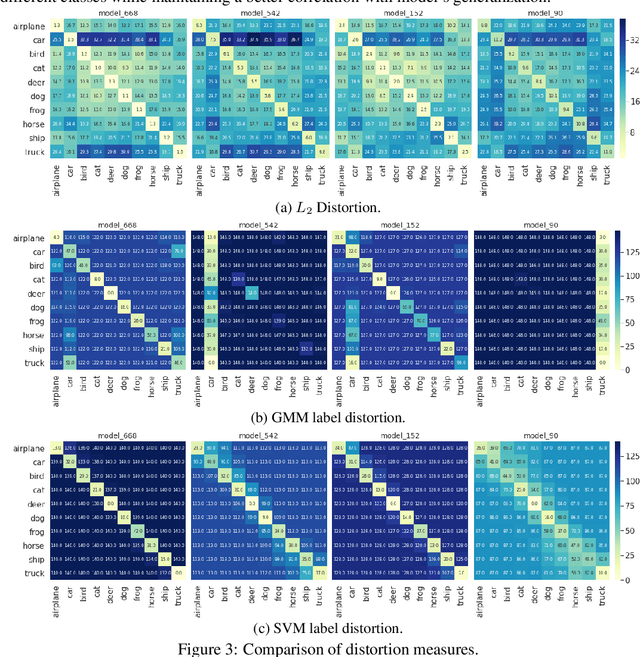
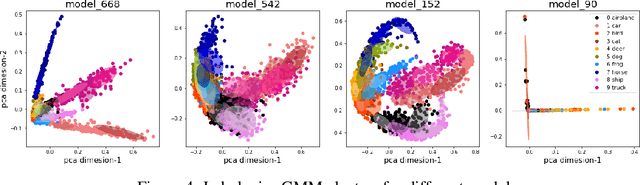
We study generalization in deep learning by appealing to complexity measures originally developed in approximation and information theory. While these concepts are challenged by the high-dimensional and data-defined nature of deep learning, we show that simple vector quantization approaches such as PCA, GMMs, and SVMs capture their spirit when applied layer-wise to deep extracted features giving rise to relatively inexpensive complexity measures that correlate well with generalization performance. We discuss our results in 2020 NeurIPS PGDL challenge.