 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformance Checking of Fuzzy Logs against Declarative Temporal Specifications
Jun 17, 2024Traditional conformance checking tasks assume that event data provide a faithful and complete representation of the actual process executions. This assumption has been recently questioned: more and more often events are not traced explicitly, but are instead indirectly obtained as the result of event recognition pipelines, and thus inherently come with uncertainty. In this work, differently from the typical probabilistic interpretation of uncertainty, we consider the relevant case where uncertainty refers to which activity is actually conducted, under a fuzzy semantics. In this novel setting, we consider the problem of checking whether fuzzy event data conform with declarative temporal rules specified as Declare patterns or, more generally, as formulae of linear temporal logic over finite traces (LTLf). This requires to relax the assumption that at each instant only one activity is executed, and to correspondingly redefine boolean operators of the logic with a fuzzy semantics. Specifically, we provide a threefold contribution. First, we define a fuzzy counterpart of LTLf tailored to our purpose. Second, we cast conformance checking over fuzzy logs as a verification problem in this logic. Third, we provide a proof-of-concept, efficient implementation based on the PyTorch Python library, suited to check conformance of multiple fuzzy traces at once.
A Semantic Approach to Decidability in Epistemic Planning (Extended Version)
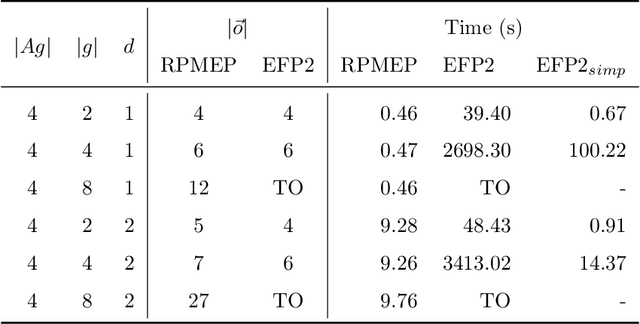
Jul 28, 2023The use of Dynamic Epistemic Logic (DEL) in multi-agent planning has led to a widely adopted action formalism that can handle nondeterminism, partial observability and arbitrary knowledge nesting. As such expressive power comes at the cost of undecidability, several decidable fragments have been isolated, mainly based on syntactic restrictions of the action formalism. In this paper, we pursue a novel semantic approach to achieve decidability. Namely, rather than imposing syntactical constraints, the semantic approach focuses on the axioms of the logic for epistemic planning. Specifically, we augment the logic of knowledge S5$_n$ and with an interaction axiom called (knowledge) commutativity, which controls the ability of agents to unboundedly reason on the knowledge of other agents. We then provide a threefold contribution. First, we show that the resulting epistemic planning problem is decidable. In doing so, we prove that our framework admits a finitary non-fixpoint characterization of common knowledge, which is of independent interest. Second, we study different generalizations of the commutativity axiom, with the goal of obtaining decidability for more expressive fragments of DEL. Finally, we show that two well-known epistemic planning systems based on action templates, when interpreted under the setting of knowledge, conform to the commutativity axiom, hence proving their decidability.
DELPHIC: Practical DEL Planning via Possibilities (Extended Version)
Jul 28, 2023



Dynamic Epistemic Logic (DEL) provides a framework for epistemic planning that is capable of representing non-deterministic actions, partial observability, higher-order knowledge and both factual and epistemic change. The high expressivity of DEL challenges existing epistemic planners, which typically can handle only restricted fragments of the whole framework. The goal of this work is to push the envelop of practical DEL planning, ultimately aiming for epistemic planners to be able to deal with the full range of features offered by DEL. Towards this goal, we question the traditional semantics of DEL, defined in terms on Kripke models. In particular, we propose an equivalent semantics defined using, as main building block, so-called possibilities: non well-founded objects representing both factual properties of the world, and what agents consider to be possible. We call the resulting framework DELPHIC. We argue that DELPHIC indeed provides a more compact representation of epistemic states. To substantiate this claim, we implement both approaches in ASP and we set up an experimental evaluation to compare DELPHIC with the traditional, Kripke-based approach. The evaluation confirms that DELPHIC outperforms the traditional approach in space and time.
Conformance Checking with Uncertainty via SMT (Extended Version)
Jun 15, 2022
Logs of real-life processes often feature uncertainty pertaining the recorded timestamps, data values, and/or events. We consider the problem of checking conformance of uncertain logs against data-aware reference processes. Specifically, we show how to solve it via SMT encodings, lifting previous work on data-aware SMT-based conformance checking to this more sophisticated setting. Our approach is modular, in that it homogeneously accommodates for different types of uncertainty. Moreover, using appropriate cost functions, different conformance checking tasks can be addressed. We show the correctness of our approach and witness feasibility through a proof-of-concept implementation.
Soundness of Data-Aware Processes with Arithmetic Conditions
Mar 28, 2022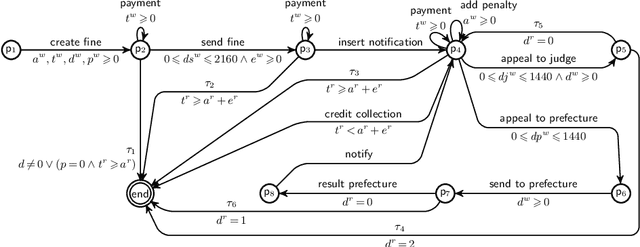
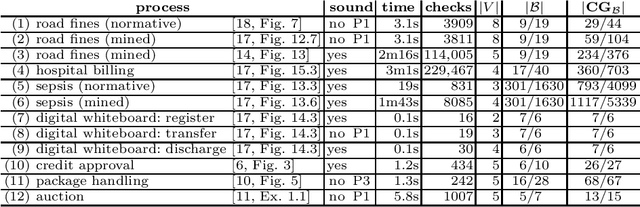
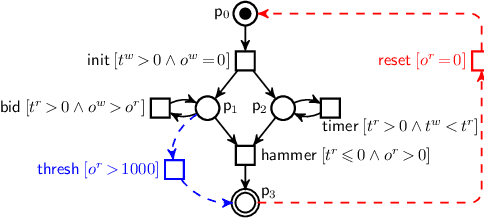
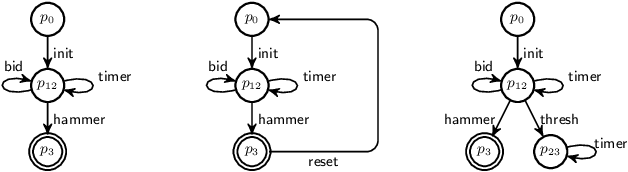
Data-aware processes represent and integrate structural and behavioural constraints in a single model, and are thus increasingly investigated in business process management and information systems engineering. In this spectrum, Data Petri nets (DPNs) have gained increasing popularity thanks to their ability to balance simplicity with expressiveness. The interplay of data and control-flow makes checking the correctness of such models, specifically the well-known property of soundness, crucial and challenging. A major shortcoming of previous approaches for checking soundness of DPNs is that they consider data conditions without arithmetic, an essential feature when dealing with real-world, concrete applications. In this paper, we attack this open problem by providing a foundational and operational framework for assessing soundness of DPNs enriched with arithmetic data conditions. The framework comes with a proof-of-concept implementation that, instead of relying on ad-hoc techniques, employs off-the-shelf established SMT technologies. The implementation is validated on a collection of examples from the literature, and on synthetic variants constructed from such examples.
Linear-Time Verification of Data-Aware Dynamic Systems with Arithmetic
Mar 15, 2022
Combined modeling and verification of dynamic systems and the data they operate on has gained momentum in AI and in several application domains. We investigate the expressive yet concise framework of data-aware dynamic systems (DDS), extending it with linear arithmetic, and provide the following contributions. First, we introduce a new, semantic property of "finite summary", which guarantees the existence of a faithful finite-state abstraction. We rely on this to show that checking whether a witness exists for a linear-time, finite-trace property is decidable for DDSs with finite summary. Second, we demonstrate that several decidability conditions studied in formal methods and database theory can be seen as concrete, checkable instances of this property. This also gives rise to new decidability results. Third, we show how the abstract, uniform property of finite summary leads to modularity results: a system enjoys finite summary if it can be partitioned appropriately into smaller systems that possess the property. Our results allow us to analyze systems that were out of reach in earlier approaches. Finally, we demonstrate the feasibility of our approach in a prototype implementation.
Efficient Multi-agent Epistemic Planning: Teaching Planners About Nested Belief
Oct 06, 2021

Many AI applications involve the interaction of multiple autonomous agents, requiring those agents to reason about their own beliefs, as well as those of other agents. However, planning involving nested beliefs is known to be computationally challenging. In this work, we address the task of synthesizing plans that necessitate reasoning about the beliefs of other agents. We plan from the perspective of a single agent with the potential for goals and actions that involve nested beliefs, non-homogeneous agents, co-present observations, and the ability for one agent to reason as if it were another. We formally characterize our notion of planning with nested belief, and subsequently demonstrate how to automatically convert such problems into problems that appeal to classical planning technology for solving efficiently. Our approach represents an important step towards applying the well-established field of automated planning to the challenging task of planning involving nested beliefs of multiple agents.
CoCoMoT: Conformance Checking of Multi-Perspective Processes via SMT (Extended Version)
Mar 18, 2021Conformance checking is a key process mining task for comparing the expected behavior captured in a process model and the actual behavior recorded in a log. While this problem has been extensively studied for pure control-flow processes, conformance checking with multi-perspective processes is still at its infancy. In this paper, we attack this challenging problem by considering processes that combine the data and control-flow dimensions. In particular, we adopt data Petri nets (DPNs) as the underlying reference formalism, and show how solid, well-established automated reasoning techniques can be effectively employed for computing conformance metrics and data-aware alignments. We do so by introducing the CoCoMoT (Computing Conformance Modulo Theories) framework, with a fourfold contribution. First, we show how SAT-based encodings studied in the pure control-flow setting can be lifted to our data-aware case, using SMT as the underlying formal and algorithmic framework. Second, we introduce a novel preprocessing technique based on a notion of property-preserving clustering, to speed up the computation of conformance checking outputs. Third, we provide a proof-of-concept implementation that uses a state-of-the-art SMT solver and report on preliminary experiments. Finally, we discuss how CoCoMoT directly lends itself to a number of further tasks, like multi- and anti-alignments, log analysis by clustering, and model repair.
SMT-based Safety Verification of Parameterised Multi-Agent Systems
Aug 14, 2020

In this paper we study the verification of parameterised multi-agent systems (MASs), and in particular the task of verifying whether unwanted states, characterised as a given state formula, are reachable in a given MAS, i.e., whether the MAS is unsafe. The MAS is parameterised and the model only describes the finite set of possible agent templates, while the actual number of concrete agent instances for each template is unbounded and cannot be foreseen. This makes the state-space infinite. As safety may of course depend on the number of agent instances in the system, the verification result must be correct irrespective of such number. We solve this problem via infinite-state model checking based on satisfiability modulo theories (SMT), relying on the theory of array-based systems: we present parameterised MASs as particular array-based systems, under two execution semantics for the MAS, which we call concurrent and interleaved. We prove our decidability results under these assumptions and illustrate our implementation approach, called SAFE: the Swarm Safety Detector, based on the third-party model checker MCMT, which we evaluate experimentally. Finally, we discuss how this approach lends itself to richer parameterised and data-aware MAS settings beyond the state-of-the-art solutions in the literature, which we leave as future work.
Situation Calculus for Synthesis of Manufacturing Controllers
Jul 12, 2018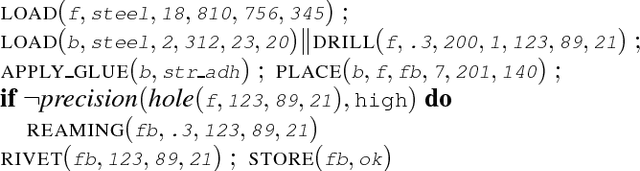
Manufacturing is transitioning from a mass production model to a manufacturing as a service model in which manufacturing facilities 'bid' to produce products. To decide whether to bid for a complex, previously unseen product, a manufacturing facility must be able to synthesize, 'on the fly', a process plan controller that delegates abstract manufacturing tasks in the supplied process recipe to the appropriate manufacturing resources, e.g., CNC machines, robots etc. Previous work in applying AI behaviour composition to synthesize process plan controllers has considered only finite state ad-hoc representations. Here, we study the problem in the relational setting of the Situation Calculus. By taking advantage of recent work on abstraction in the Situation Calculus, process recipes and available resources are represented by ConGolog programs over, respectively, an abstract and a concrete action theory. This allows us to capture the problem in a formal, general framework, and show decidability for the case of bounded action theories. We also provide techniques for actually synthesizing the controller.