 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Epistemic Planning Domain Definition Language: Official Guideline
Jan 28, 2026Epistemic planning extends (multi-agent) automated planning by making agents' knowledge and beliefs first-class aspects of the planning formalism. One of the most well-known frameworks for epistemic planning is Dynamic Epistemic Logic (DEL), which offers an rich and natural semantics for modelling problems in this setting. The high expressive power provided by DEL make DEL-based epistemic planning a challenging problem to tackle both theoretically, and in practical implementations. As a result, existing epistemic planners often target different DEL fragments, and typically rely on ad hoc languages to represent benchmarks, and sometimes no language at all. This fragmentation hampers comparison, reuse, and systematic benchmark development. We address these issues by introducing the Epistemic Planning Domain Definition Language (EPDDL). EPDDL provides a unique PDDL-like representation that captures the entire DEL semantics, enabling uniform specification of epistemic planning tasks. Our contributions are threefold: 1. A formal development of abstract event models, a novel representation for epistemic actions used to define the semantics of our language; 2. A formal specification of EPDDL's syntax and semantics grounded in DEL with abstract event models; 3. A demonstration of EPDDL's practical applicability: we identify useful fragments amenable to current planners and show how they can be represented in EPDDL. Through examples of representative benchmarks, we illustrate how EPDDL facilitates interoperability, reproducible evaluation, and future advances in epistemic planning.
Depth-Bounded Epistemic Planning
Jun 03, 2024

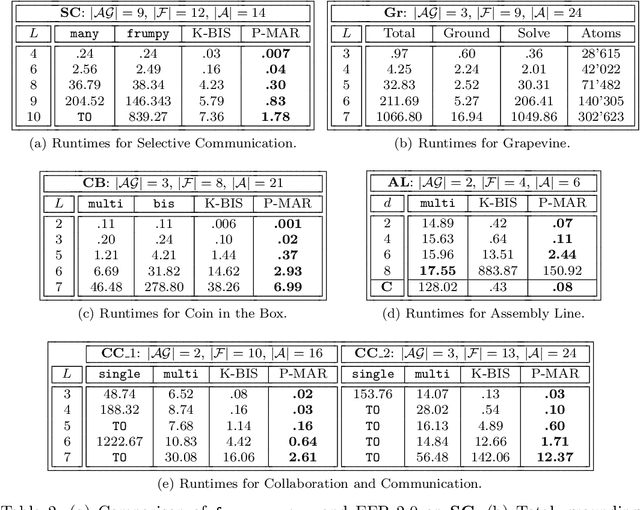
In this paper, we propose a novel algorithm for epistemic planning based on dynamic epistemic logic (DEL). The novelty is that we limit the depth of reasoning of the planning agent to an upper bound b, meaning that the planning agent can only reason about higher-order knowledge to at most (modal) depth b. The algorithm makes use of a novel type of canonical b-bisimulation contraction guaranteeing unique minimal models with respect to b-bisimulation. We show our depth-bounded planning algorithm to be sound. Additionally, we show it to be complete with respect to planning tasks having a solution within bound b of reasoning depth (and hence the iterative bound-deepening variant is complete in the standard sense). For bound b of reasoning depth, the algorithm is shown to be (b + 1)-EXPTIME complete, and furthermore fixed-parameter tractable in the number of agents and atoms. We present both a tree search and a graph search variant of the algorithm, and we benchmark an implementation of the tree search version against a baseline epistemic planner.
DELPHIC: Practical DEL Planning via Possibilities (Extended Version)
Jul 28, 2023



Dynamic Epistemic Logic (DEL) provides a framework for epistemic planning that is capable of representing non-deterministic actions, partial observability, higher-order knowledge and both factual and epistemic change. The high expressivity of DEL challenges existing epistemic planners, which typically can handle only restricted fragments of the whole framework. The goal of this work is to push the envelop of practical DEL planning, ultimately aiming for epistemic planners to be able to deal with the full range of features offered by DEL. Towards this goal, we question the traditional semantics of DEL, defined in terms on Kripke models. In particular, we propose an equivalent semantics defined using, as main building block, so-called possibilities: non well-founded objects representing both factual properties of the world, and what agents consider to be possible. We call the resulting framework DELPHIC. We argue that DELPHIC indeed provides a more compact representation of epistemic states. To substantiate this claim, we implement both approaches in ASP and we set up an experimental evaluation to compare DELPHIC with the traditional, Kripke-based approach. The evaluation confirms that DELPHIC outperforms the traditional approach in space and time.
A Semantic Approach to Decidability in Epistemic Planning (Extended Version)
Jul 28, 2023The use of Dynamic Epistemic Logic (DEL) in multi-agent planning has led to a widely adopted action formalism that can handle nondeterminism, partial observability and arbitrary knowledge nesting. As such expressive power comes at the cost of undecidability, several decidable fragments have been isolated, mainly based on syntactic restrictions of the action formalism. In this paper, we pursue a novel semantic approach to achieve decidability. Namely, rather than imposing syntactical constraints, the semantic approach focuses on the axioms of the logic for epistemic planning. Specifically, we augment the logic of knowledge S5$_n$ and with an interaction axiom called (knowledge) commutativity, which controls the ability of agents to unboundedly reason on the knowledge of other agents. We then provide a threefold contribution. First, we show that the resulting epistemic planning problem is decidable. In doing so, we prove that our framework admits a finitary non-fixpoint characterization of common knowledge, which is of independent interest. Second, we study different generalizations of the commutativity axiom, with the goal of obtaining decidability for more expressive fragments of DEL. Finally, we show that two well-known epistemic planning systems based on action templates, when interpreted under the setting of knowledge, conform to the commutativity axiom, hence proving their decidability.
Modelling Multi-Agent Epistemic Planning in ASP
Aug 07, 2020
Designing agents that reason and act upon the world has always been one of the main objectives of the Artificial Intelligence community. While for planning in "simple" domains the agents can solely rely on facts about the world, in several contexts, e.g., economy, security, justice and politics, the mere knowledge of the world could be insufficient to reach a desired goal. In these scenarios, epistemic reasoning, i.e., reasoning about agents' beliefs about themselves and about other agents' beliefs, is essential to design winning strategies. This paper addresses the problem of reasoning in multi-agent epistemic settings exploiting declarative programming techniques. In particular, the paper presents an actual implementation of a multi-shot Answer Set Programming-based planner that can reason in multi-agent epistemic settings, called PLATO (ePistemic muLti-agent Answer seT programming sOlver). The ASP paradigm enables a concise and elegant design of the planner, w.r.t. other imperative implementations, facilitating the development of formal verification of correctness. The paper shows how the planner, exploiting an ad-hoc epistemic state representation and the efficiency of ASP solvers, has competitive performance results on benchmarks collected from the literature. It is under consideration for acceptance in TPLP.