 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXAI-LAW: A Logic Programming Tool for Modeling, Explaining, and Learning Legal Decisions
Jan 07, 2026We propose an approach to model articles of the Italian Criminal Code (ICC), using Answer Set Programming (ASP), and to semi-automatically learn legal rules from examples based on prior judicial decisions. The developed tool is intended to support legal experts during the criminal trial phase by providing reasoning and possible legal outcomes. The methodology involves analyzing and encoding articles of the ICC in ASP, including "crimes against the person" and property offenses. The resulting model is validated on a set of previous verdicts and refined as necessary. During the encoding process, contradictions may arise; these are properly handled by the system, which also generates possible decisions for new cases and provides explanations through a tool that leverages the "supportedness" of stable models. The automatic explainability offered by the tool can also be used to clarify the logic behind judicial decisions, making the decision-making process more interpretable. Furthermore, the tool integrates an inductive logic programming system for ASP, which is employed to generalize legal rules from case examples.
* In Proceedings ICLP 2025, arXiv:2601.00047
An xAI Approach for Data-to-Text Processing with ASP
Aug 30, 2023The generation of natural language text from data series gained renewed interest among AI research goals. Not surprisingly, the few proposals in the state of the art are based on training some system, in order to produce a text that describes and that is coherent to the data provided as input. Main challenges of such approaches are the proper identification of "what" to say (the key descriptive elements to be addressed in the data) and "how" to say: the correspondence and accuracy between data and text, the presence of contradictions/redundancy in the text, the control of the amount of synthesis. This paper presents a framework that is compliant with xAI requirements. In particular we model ASP/Python programs that enable an explicit control of accuracy errors and amount of synthesis, with proven optimal solutions. The text description is hierarchically organized, in a top-down structure where text is enriched with further details, according to logic rules. The generation of natural language descriptions' structure is also managed by logic rules.
* In Proceedings ICLP 2023, arXiv:2308.14898
Parallel Logic Programming: A Sequel
Nov 22, 2021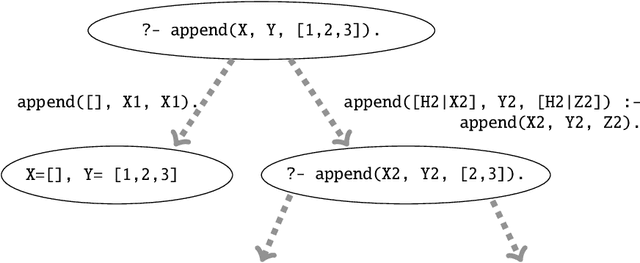
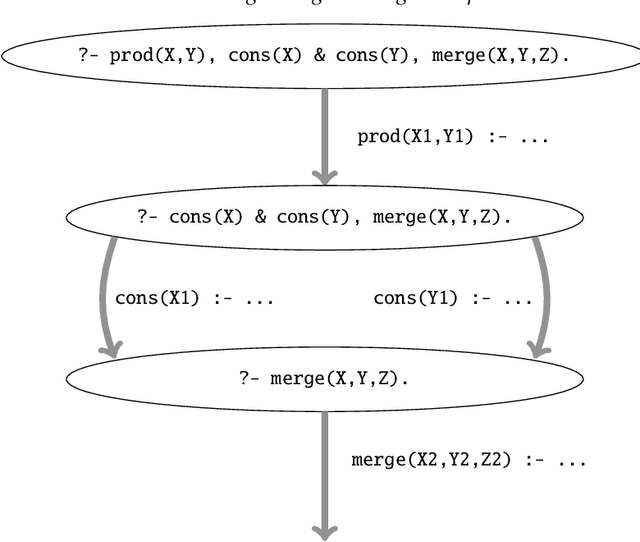
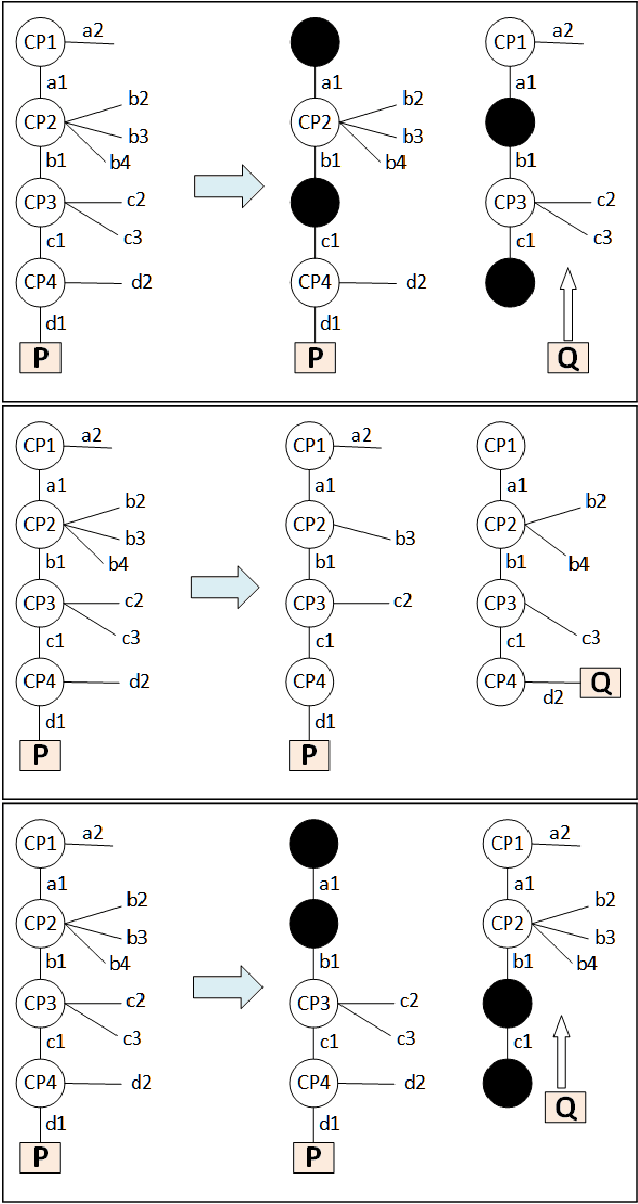
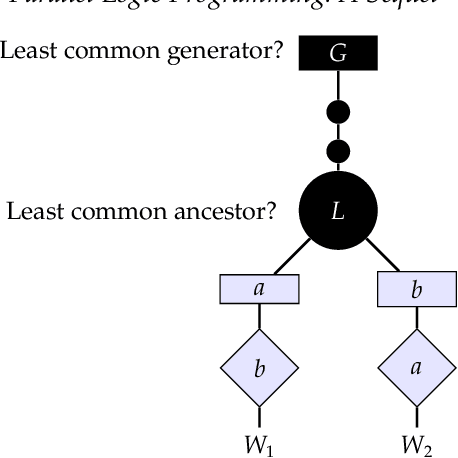
Multi-core and highly-connected architectures have become ubiquitous, and this has brought renewed interest in language-based approaches to the exploitation of parallelism. Since its inception, logic programming has been recognized as a programming paradigm with great potential for automated exploitation of parallelism. The comprehensive survey of the first twenty years of research in parallel logic programming, published in 2001, has served since as a fundamental reference to researchers and developers. The contents are quite valid today, but at the same time the field has continued evolving at a fast pace in the years that have followed. Many of these achievements and ongoing research have been driven by the rapid pace of technological innovation, that has led to advances such as very large clusters, the wide diffusion of multi-core processors, the game-changing role of general-purpose graphic processing units, and the ubiquitous adoption of cloud computing. This has been paralleled by significant advances within logic programming, such as tabling, more powerful static analysis and verification, the rapid growth of Answer Set Programming, and in general, more mature implementations and systems. This survey provides a review of the research in parallel logic programming covering the period since 2001, thus providing a natural continuation of the previous survey. The goal of the survey is to serve not only as a reference for researchers and developers of logic programming systems, but also as engaging reading for anyone interested in logic and as a useful source for researchers in parallel systems outside logic programming. Under consideration in Theory and Practice of Logic Programming (TPLP).
Modelling Multi-Agent Epistemic Planning in ASP
Aug 07, 2020
Designing agents that reason and act upon the world has always been one of the main objectives of the Artificial Intelligence community. While for planning in "simple" domains the agents can solely rely on facts about the world, in several contexts, e.g., economy, security, justice and politics, the mere knowledge of the world could be insufficient to reach a desired goal. In these scenarios, epistemic reasoning, i.e., reasoning about agents' beliefs about themselves and about other agents' beliefs, is essential to design winning strategies. This paper addresses the problem of reasoning in multi-agent epistemic settings exploiting declarative programming techniques. In particular, the paper presents an actual implementation of a multi-shot Answer Set Programming-based planner that can reason in multi-agent epistemic settings, called PLATO (ePistemic muLti-agent Answer seT programming sOlver). The ASP paradigm enables a concise and elegant design of the planner, w.r.t. other imperative implementations, facilitating the development of formal verification of correctness. The paper shows how the planner, exploiting an ad-hoc epistemic state representation and the efficiency of ASP solvers, has competitive performance results on benchmarks collected from the literature. It is under consideration for acceptance in TPLP.
GPU-based parallelism for ASP-solving
Sep 04, 2019
Answer Set Programming (ASP) has become, the paradigm of choice in the field of logic programming and non-monotonic reasoning. Thanks to the availability of efficient solvers, ASP has been successfully employed in a large number of application domains. The term GPU-computing indicates a recent programming paradigm aimed at enabling the use of modern parallel Graphical Processing Units (GPUs) for general purpose computing. In this paper we describe an approach to ASP-solving that exploits GPU parallelism. The design of a GPU-based solver poses various challenges due to the peculiarities of GPUs' software and hardware architectures and to the intrinsic nature of the satisfiability problem.
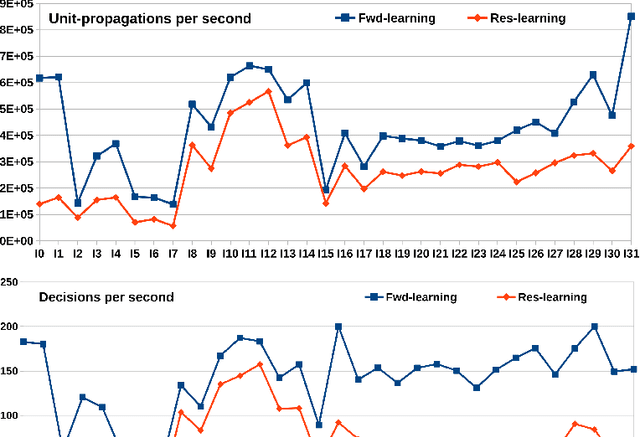
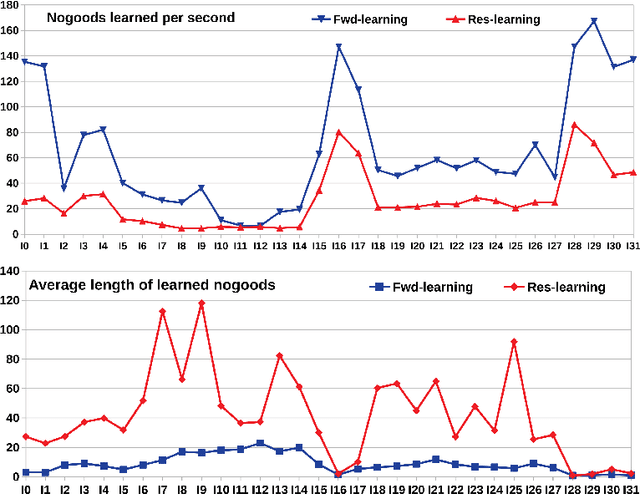
Solving DCOPs with Distributed Large Neighborhood Search
Feb 23, 2017

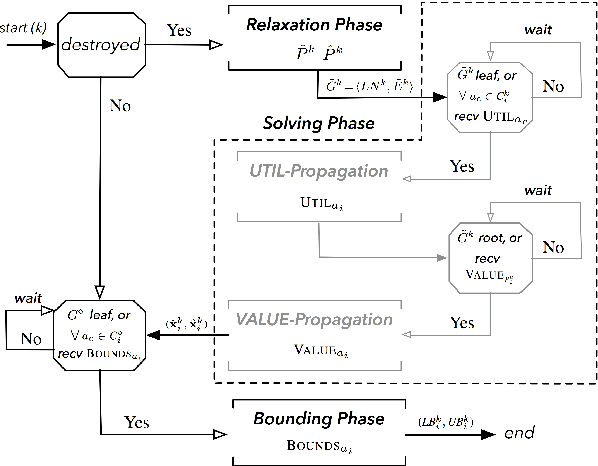
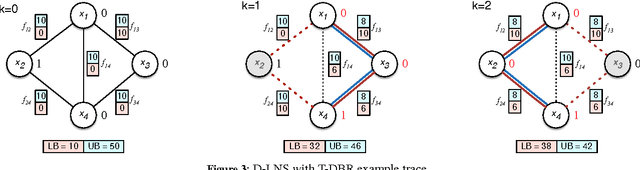
The field of Distributed Constraint Optimization has gained momentum in recent years, thanks to its ability to address various applications related to multi-agent cooperation. Nevertheless, solving Distributed Constraint Optimization Problems (DCOPs) optimally is NP-hard. Therefore, in large-scale, complex applications, incomplete DCOP algorithms are necessary. Current incomplete DCOP algorithms suffer of one or more of the following limitations: they (a) find local minima without providing quality guarantees; (b) provide loose quality assessment; or (c) are unable to benefit from the structure of the problem, such as domain-dependent knowledge and hard constraints. Therefore, capitalizing on strategies from the centralized constraint solving community, we propose a Distributed Large Neighborhood Search (D-LNS) framework to solve DCOPs. The proposed framework (with its novel repair phase) provides guarantees on solution quality, refining upper and lower bounds during the iterative process, and can exploit domain-dependent structures. Our experimental results show that D-LNS outperforms other incomplete DCOP algorithms on both structured and unstructured problem instances.
Planning as Tabled Logic Programming
Jul 14, 2015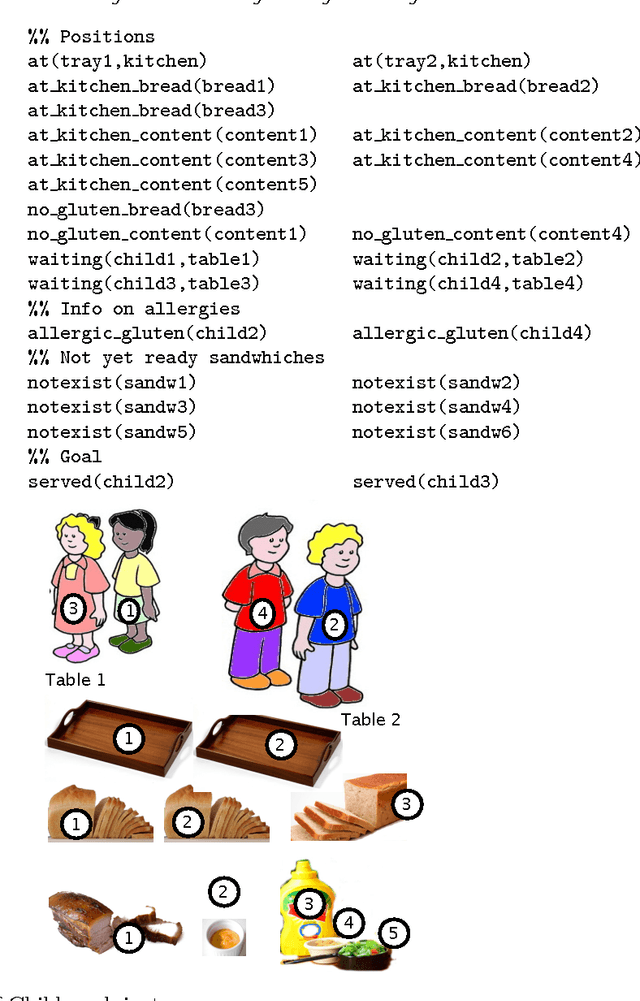

This paper describes Picat's planner, its implementation, and planning models for several domains used in International Planning Competition (IPC) 2014. Picat's planner is implemented by use of tabling. During search, every state encountered is tabled, and tabled states are used to effectively perform resource-bounded search. In Picat, structured data can be used to avoid enumerating all possible permutations of objects, and term sharing is used to avoid duplication of common state data. This paper presents several modeling techniques through the example models, ranging from designing state representations to facilitate data sharing and symmetry breaking, encoding actions with operations for efficient precondition checking and state updating, to incorporating domain knowledge and heuristics. Broadly, this paper demonstrates the effectiveness of tabled logic programming for planning, and argues the importance of modeling despite recent significant progress in domain-independent PDDL planners.
* 27 pages in TPLP 2015
Introduction to the 28th International Conference on Logic Programming Special Issue
Oct 15, 2012We are proud to introduce this special issue of the Journal of Theory and Practice of Logic Programming (TPLP), dedicated to the full papers accepted for the 28th International Conference on Logic Programming (ICLP). The ICLP meetings started in Marseille in 1982 and since then constitute the main venue for presenting and discussing work in the area of logic programming.
Autonomous Agents Coordination: Action Languages meet CLP(FD) and Linda
Oct 04, 2011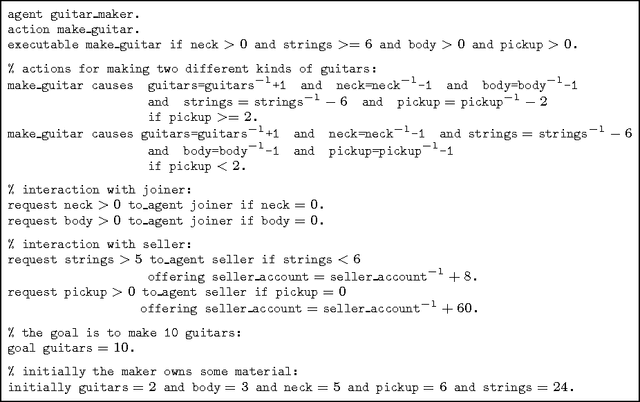
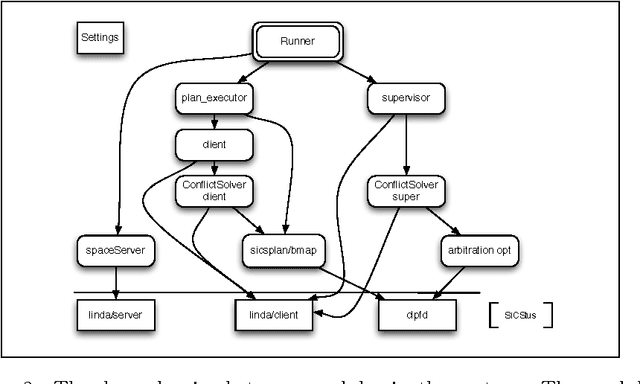
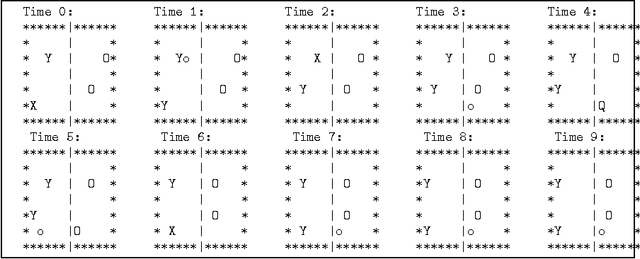
The paper presents a knowledge representation formalism, in the form of a high-level Action Description Language for multi-agent systems, where autonomous agents reason and act in a shared environment. Agents are autonomously pursuing individual goals, but are capable of interacting through a shared knowledge repository. In their interactions through shared portions of the world, the agents deal with problems of synchronization and concurrency; the action language allows the description of strategies to ensure a consistent global execution of the agents' autonomously derived plans. A distributed planning problem is formalized by providing the declarative specifications of the portion of the problem pertaining a single agent. Each of these specifications is executable by a stand-alone CLP-based planner. The coordination among agents exploits a Linda infrastructure. The proposal is validated in a prototype implementation developed in SICStus Prolog. To appear in Theory and Practice of Logic Programming (TPLP).
CLP-based protein fragment assembly
Jul 29, 2010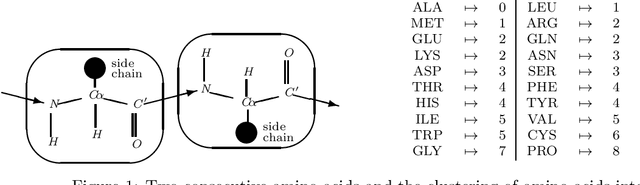
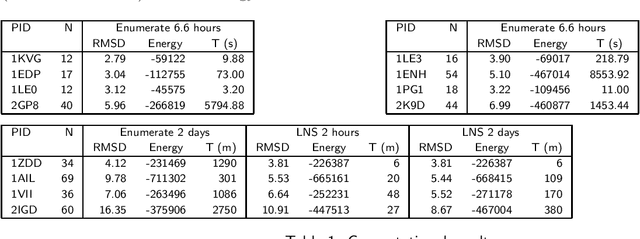
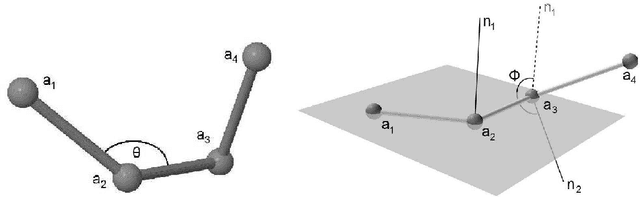
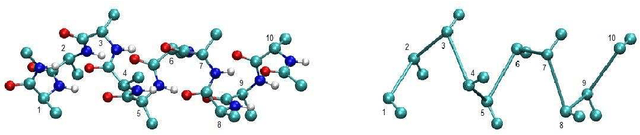
The paper investigates a novel approach, based on Constraint Logic Programming (CLP), to predict the 3D conformation of a protein via fragments assembly. The fragments are extracted by a preprocessor-also developed for this work- from a database of known protein structures that clusters and classifies the fragments according to similarity and frequency. The problem of assembling fragments into a complete conformation is mapped to a constraint solving problem and solved using CLP. The constraint-based model uses a medium discretization degree Ca-side chain centroid protein model that offers efficiency and a good approximation for space filling. The approach adapts existing energy models to the protein representation used and applies a large neighboring search strategy. The results shows the feasibility and efficiency of the method. The declarative nature of the solution allows to include future extensions, e.g., different size fragments for better accuracy.
* special issue dedicated to ICLP 2010