Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-valued Action Languages in CLP(FD)
Paper and Code
Dec 15, 2009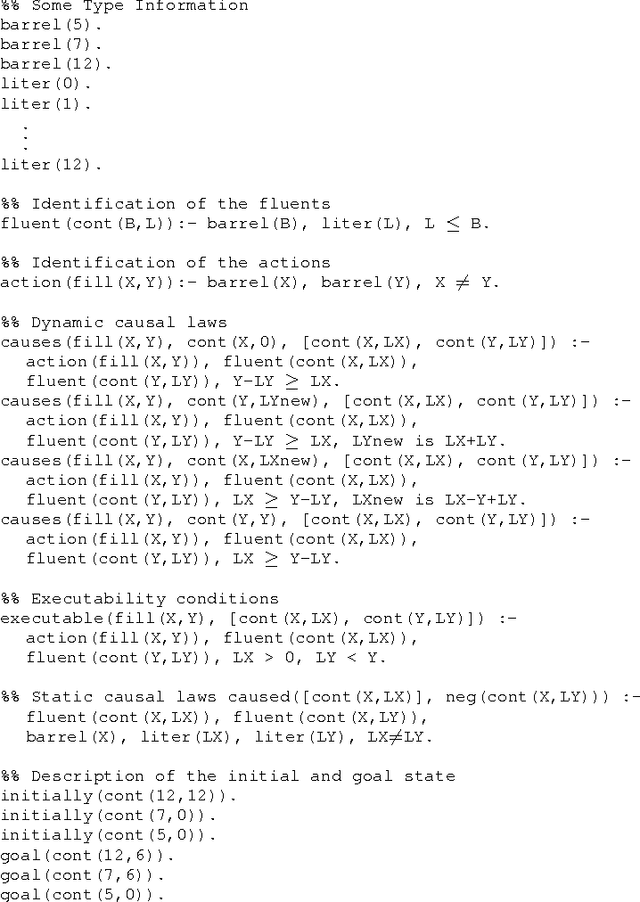



Action description languages, such as A and B, are expressive instruments introduced for formalizing planning domains and planning problem instances. The paper starts by proposing a methodology to encode an action language (with conditional effects and static causal laws), a slight variation of B, using Constraint Logic Programming over Finite Domains. The approach is then generalized to raise the use of constraints to the level of the action language itself. A prototype implementation has been developed, and the preliminary results are presented and discussed. To appear in Theory and Practice of Logic Programming (TPLP)
View paper on