 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Agents Coordination: Action Languages meet CLP(FD) and Linda
Paper and Code
Oct 04, 2011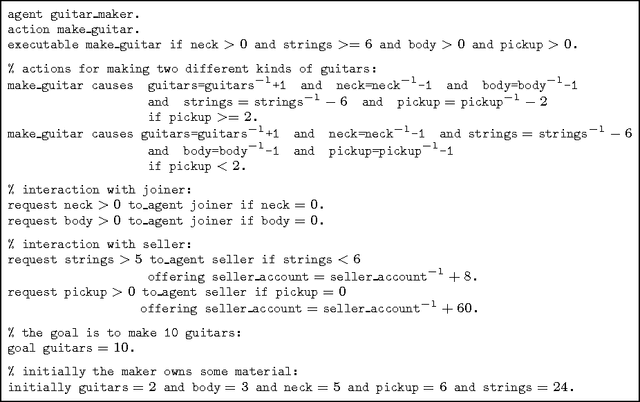
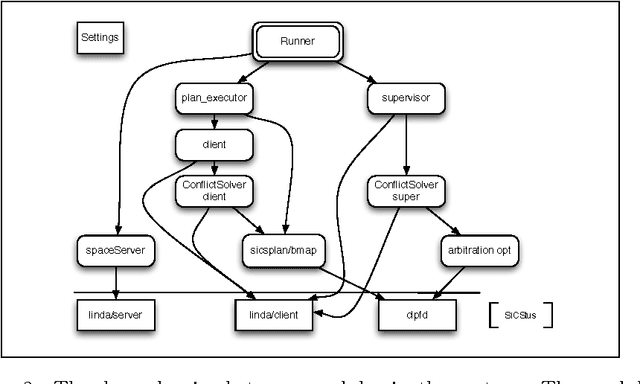
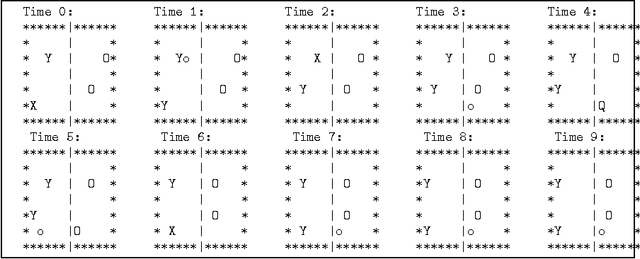
The paper presents a knowledge representation formalism, in the form of a high-level Action Description Language for multi-agent systems, where autonomous agents reason and act in a shared environment. Agents are autonomously pursuing individual goals, but are capable of interacting through a shared knowledge repository. In their interactions through shared portions of the world, the agents deal with problems of synchronization and concurrency; the action language allows the description of strategies to ensure a consistent global execution of the agents' autonomously derived plans. A distributed planning problem is formalized by providing the declarative specifications of the portion of the problem pertaining a single agent. Each of these specifications is executable by a stand-alone CLP-based planner. The coordination among agents exploits a Linda infrastructure. The proposal is validated in a prototype implementation developed in SICStus Prolog. To appear in Theory and Practice of Logic Programming (TPLP).