 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Language Interaction with Databases on Edge Devices in the Internet of Battlefield Things
Jun 05, 2025The expansion of the Internet of Things (IoT) in the battlefield, Internet of Battlefield Things (IoBT), gives rise to new opportunities for enhancing situational awareness. To increase the potential of IoBT for situational awareness in critical decision making, the data from these devices must be processed into consumer-ready information objects, and made available to consumers on demand. To address this challenge we propose a workflow that makes use of natural language processing (NLP) to query a database technology and return a response in natural language. Our solution utilizes Large Language Models (LLMs) that are sized for edge devices to perform NLP as well as graphical databases which are well suited for dynamic connected networks which are pervasive in the IoBT. Our architecture employs LLMs for both mapping questions in natural language to Cypher database queries as well as to summarize the database output back to the user in natural language. We evaluate several medium sized LLMs for both of these tasks on a database representing publicly available data from the US Army's Multipurpose Sensing Area (MSA) at the Jornada Range in Las Cruces, NM. We observe that Llama 3.1 (8 billion parameters) outperforms the other models across all the considered metrics. Most importantly, we note that, unlike current methods, our two step approach allows the relaxation of the Exact Match (EM) requirement of the produced Cypher queries with ground truth code and, in this way, it achieves a 19.4% increase in accuracy. Our workflow lays the ground work for deploying LLMs on edge devices to enable natural language interactions with databases containing information objects for critical decision making.
SERN: Simulation-Enhanced Realistic Navigation for Multi-Agent Robotic Systems in Contested Environments
Oct 22, 2024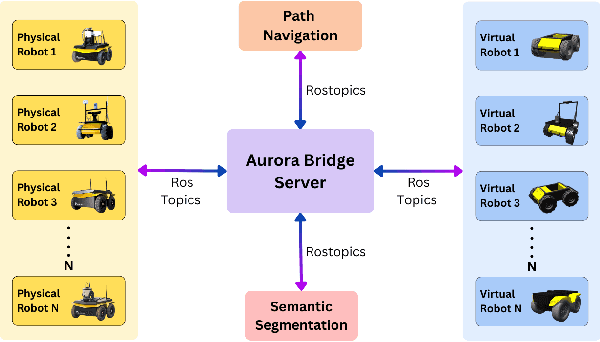
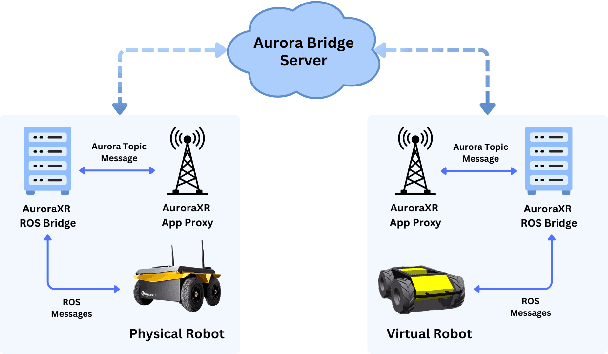
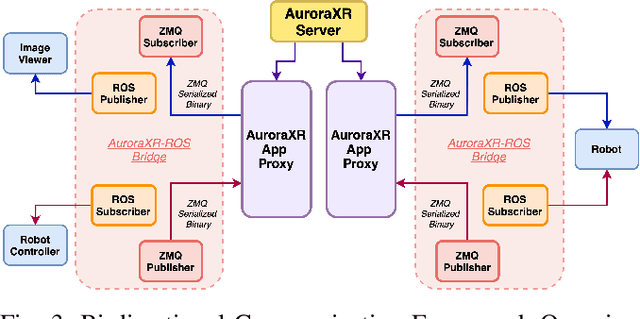
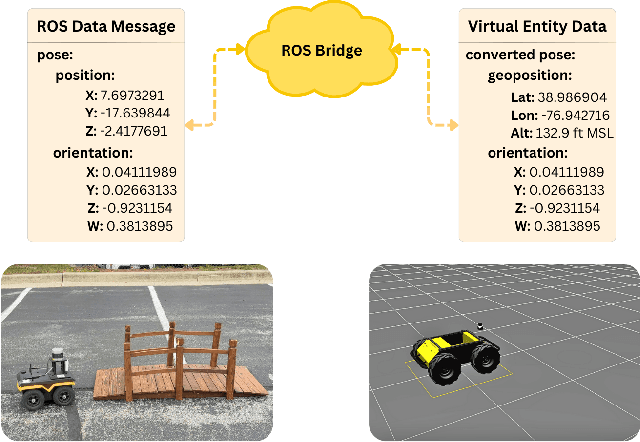
The increasing deployment of autonomous systems in complex environments necessitates efficient communication and task completion among multiple agents. This paper presents SERN (Simulation-Enhanced Realistic Navigation), a novel framework integrating virtual and physical environments for real-time collaborative decision-making in multi-robot systems. SERN addresses key challenges in asset deployment and coordination through a bi-directional communication framework using the AuroraXR ROS Bridge. Our approach advances the SOTA through accurate real-world representation in virtual environments using Unity high-fidelity simulator; synchronization of physical and virtual robot movements; efficient ROS data distribution between remote locations; and integration of SOTA semantic segmentation for enhanced environmental perception. Our evaluations show a 15% to 24% improvement in latency and up to a 15% increase in processing efficiency compared to traditional ROS setups. Real-world and virtual simulation experiments with multiple robots demonstrate synchronization accuracy, achieving less than 5 cm positional error and under 2-degree rotational error. These results highlight SERN's potential to enhance situational awareness and multi-agent coordination in diverse, contested environments.
Multi-Agent Reinforcement Learning with Control-Theoretic Safety Guarantees for Dynamic Network Bridging
Apr 02, 2024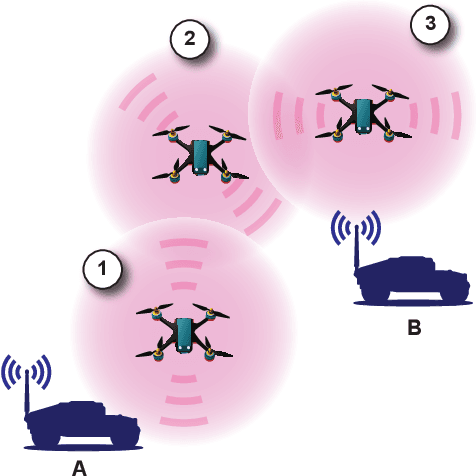

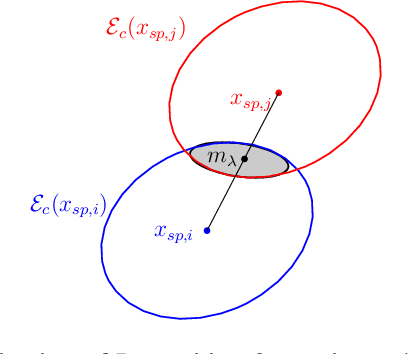

Addressing complex cooperative tasks in safety-critical environments poses significant challenges for Multi-Agent Systems, especially under conditions of partial observability. This work introduces a hybrid approach that integrates Multi-Agent Reinforcement Learning with control-theoretic methods to ensure safe and efficient distributed strategies. Our contributions include a novel setpoint update algorithm that dynamically adjusts agents' positions to preserve safety conditions without compromising the mission's objectives. Through experimental validation, we demonstrate significant advantages over conventional MARL strategies, achieving comparable task performance with zero safety violations. Our findings indicate that integrating safe control with learning approaches not only enhances safety compliance but also achieves good performance in mission objectives.
Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Apr 02, 2024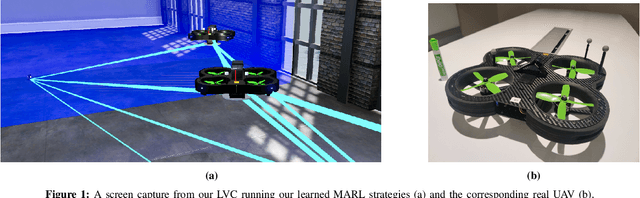
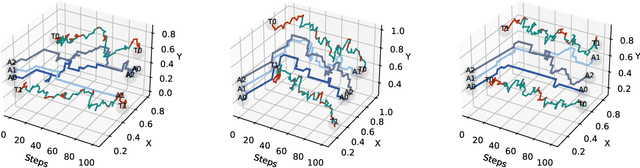
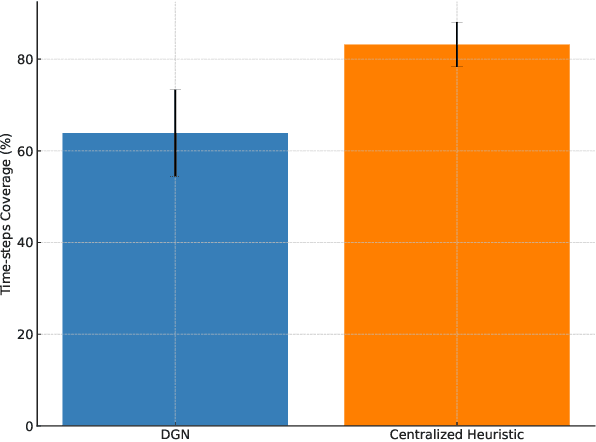
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.
Learning Collaborative Information Dissemination with Graph-based Multi-Agent Reinforcement Learning
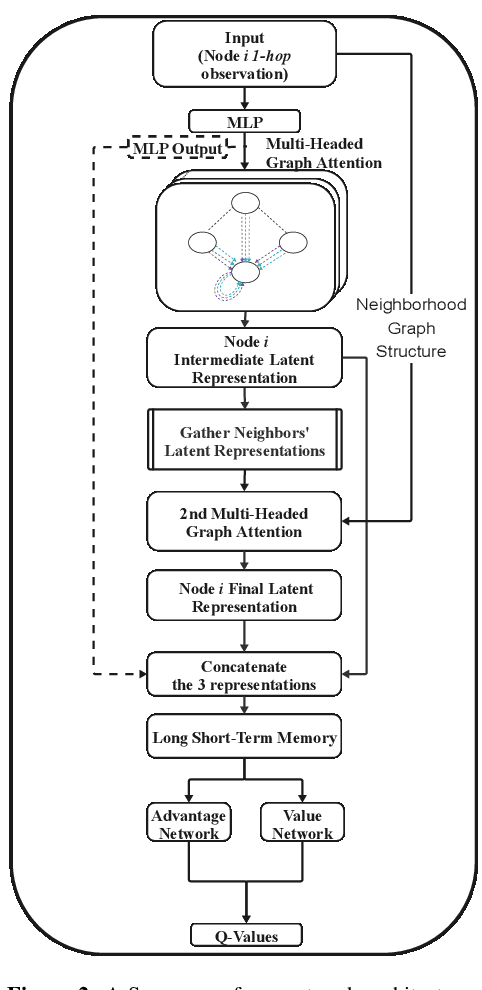
Aug 25, 2023In modern communication systems, efficient and reliable information dissemination is crucial for supporting critical operations across domains like disaster response, autonomous vehicles, and sensor networks. This paper introduces a Multi-Agent Reinforcement Learning (MARL) approach as a significant step forward in achieving more decentralized, efficient, and collaborative solutions. We propose a Decentralized-POMDP formulation for information dissemination, empowering each agent to independently decide on message forwarding. This constitutes a significant paradigm shift from traditional heuristics based on Multi-Point Relay (MPR) selection. Our approach harnesses Graph Convolutional Reinforcement Learning, employing Graph Attention Networks (GAT) with dynamic attention to capture essential network features. We propose two approaches, L-DGN and HL-DGN, which differ in the information that is exchanged among agents. We evaluate the performance of our decentralized approaches, by comparing them with a widely-used MPR heuristic, and we show that our trained policies are able to efficiently cover the network while bypassing the MPR set selection process. Our approach promises a first step toward bolstering the resilience of real-world broadcast communication infrastructures via learned, collaborative information dissemination.
Learning to Sail Dynamic Networks: The MARLIN Reinforcement Learning Framework for Congestion Control in Tactical Environments
Jun 27, 2023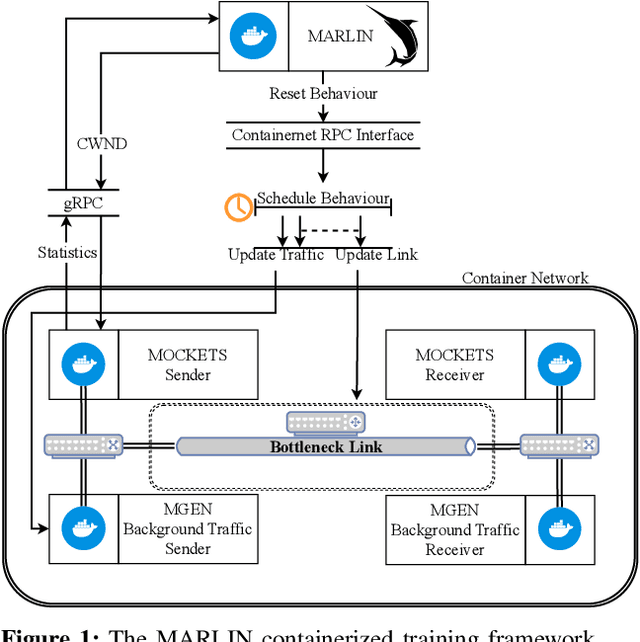
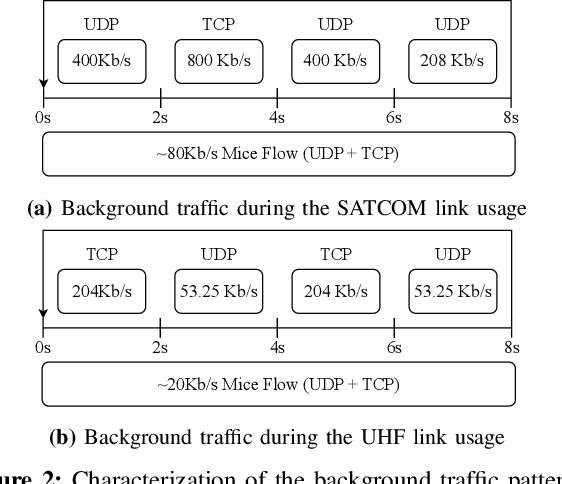
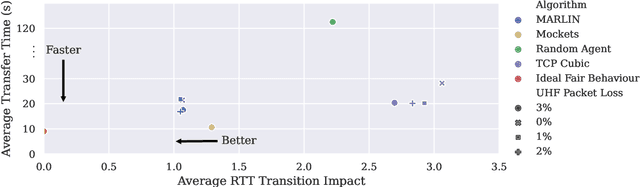
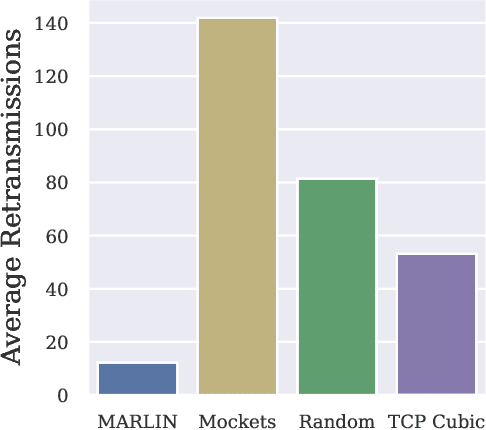
Conventional Congestion Control (CC) algorithms,such as TCP Cubic, struggle in tactical environments as they misinterpret packet loss and fluctuating network performance as congestion symptoms. Recent efforts, including our own MARLIN, have explored the use of Reinforcement Learning (RL) for CC, but they often fall short of generalization, particularly in competitive, unstable, and unforeseen scenarios. To address these challenges, this paper proposes an RL framework that leverages an accurate and parallelizable emulation environment to reenact the conditions of a tactical network. We also introduce refined RL formulation and performance evaluation methods tailored for agents operating in such intricate scenarios. We evaluate our RL learning framework by training a MARLIN agent in conditions replicating a bottleneck link transition between a Satellite Communication (SATCOM) and an UHF Wide Band (UHF) radio link. Finally, we compared its performance in file transfer tasks against Transmission Control Protocol (TCP) Cubic and the default strategy implemented in the Mockets tactical communication middleware. The results demonstrate that the MARLIN RL agent outperforms both TCP and Mockets under different perspectives and highlight the effectiveness of specialized RL solutions in optimizing CC for tactical network environments.
HeteroEdge: Addressing Asymmetry in Heterogeneous Collaborative Autonomous Systems
May 05, 2023
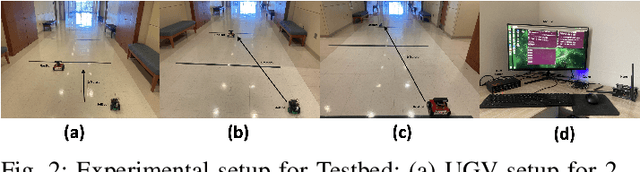


Gathering knowledge about surroundings and generating situational awareness for IoT devices is of utmost importance for systems developed for smart urban and uncontested environments. For example, a large-area surveillance system is typically equipped with multi-modal sensors such as cameras and LIDARs and is required to execute deep learning algorithms for action, face, behavior, and object recognition. However, these systems face power and memory constraints due to their ubiquitous nature, making it crucial to optimize data processing, deep learning algorithm input, and model inference communication. In this paper, we propose a self-adaptive optimization framework for a testbed comprising two Unmanned Ground Vehicles (UGVs) and two NVIDIA Jetson devices. This framework efficiently manages multiple tasks (storage, processing, computation, transmission, inference) on heterogeneous nodes concurrently. It involves compressing and masking input image frames, identifying similar frames, and profiling devices to obtain boundary conditions for optimization.. Finally, we propose and optimize a novel parameter split-ratio, which indicates the proportion of the data required to be offloaded to another device while considering the networking bandwidth, busy factor, memory (CPU, GPU, RAM), and power constraints of the devices in the testbed. Our evaluations captured while executing multiple tasks (e.g., PoseNet, SegNet, ImageNet, DetectNet, DepthNet) simultaneously, reveal that executing 70% (split-ratio=70%) of the data on the auxiliary node minimizes the offloading latency by approx. 33% (18.7 ms/image to 12.5 ms/image) and the total operation time by approx. 47% (69.32s to 36.43s) compared to the baseline configuration (executing on the primary node).
Enhancing object detection robustness: A synthetic and natural perturbation approach
Apr 20, 2023



Robustness against real-world distribution shifts is crucial for the successful deployment of object detection models in practical applications. In this paper, we address the problem of assessing and enhancing the robustness of object detection models against natural perturbations, such as varying lighting conditions, blur, and brightness. We analyze four state-of-the-art deep neural network models, Detr-ResNet-101, Detr-ResNet-50, YOLOv4, and YOLOv4-tiny, using the COCO 2017 dataset and ExDark dataset. By simulating synthetic perturbations with the AugLy package, we systematically explore the optimal level of synthetic perturbation required to improve the models robustness through data augmentation techniques. Our comprehensive ablation study meticulously evaluates the impact of synthetic perturbations on object detection models performance against real-world distribution shifts, establishing a tangible connection between synthetic augmentation and real-world robustness. Our findings not only substantiate the effectiveness of synthetic perturbations in improving model robustness, but also provide valuable insights for researchers and practitioners in developing more robust and reliable object detection models tailored for real-world applications.
MARLIN: Soft Actor-Critic based Reinforcement Learning for Congestion Control in Real Networks
Feb 02, 2023Fast and efficient transport protocols are the foundation of an increasingly distributed world. The burden of continuously delivering improved communication performance to support next-generation applications and services, combined with the increasing heterogeneity of systems and network technologies, has promoted the design of Congestion Control (CC) algorithms that perform well under specific environments. The challenge of designing a generic CC algorithm that can adapt to a broad range of scenarios is still an open research question. To tackle this challenge, we propose to apply a novel Reinforcement Learning (RL) approach. Our solution, MARLIN, uses the Soft Actor-Critic algorithm to maximize both entropy and return and models the learning process as an infinite-horizon task. We trained MARLIN on a real network with varying background traffic patterns to overcome the sim-to-real mismatch that researchers have encountered when applying RL to CC. We evaluated our solution on the task of file transfer and compared it to TCP Cubic. While further research is required, results have shown that MARLIN can achieve comparable results to TCP with little hyperparameter tuning, in a task significantly different from its training setting. Therefore, we believe that our work represents a promising first step toward building CC algorithms based on the maximum entropy RL framework.