 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuasiNav: Asymmetric Cost-Aware Navigation Planning with Constrained Quasimetric Reinforcement Learning
Oct 22, 2024Autonomous navigation in unstructured outdoor environments is inherently challenging due to the presence of asymmetric traversal costs, such as varying energy expenditures for uphill versus downhill movement. Traditional reinforcement learning methods often assume symmetric costs, which can lead to suboptimal navigation paths and increased safety risks in real-world scenarios. In this paper, we introduce QuasiNav, a novel reinforcement learning framework that integrates quasimetric embeddings to explicitly model asymmetric costs and guide efficient, safe navigation. QuasiNav formulates the navigation problem as a constrained Markov decision process (CMDP) and employs quasimetric embeddings to capture directionally dependent costs, allowing for a more accurate representation of the terrain. This approach is combined with adaptive constraint tightening within a constrained policy optimization framework to dynamically enforce safety constraints during learning. We validate QuasiNav across three challenging navigation scenarios-undulating terrains, asymmetric hill traversal, and directionally dependent terrain traversal-demonstrating its effectiveness in both simulated and real-world environments. Experimental results show that QuasiNav significantly outperforms conventional methods, achieving higher success rates, improved energy efficiency, and better adherence to safety constraints.
SERN: Simulation-Enhanced Realistic Navigation for Multi-Agent Robotic Systems in Contested Environments
Oct 22, 2024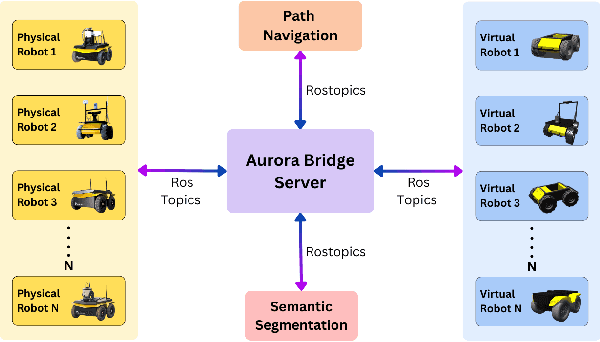
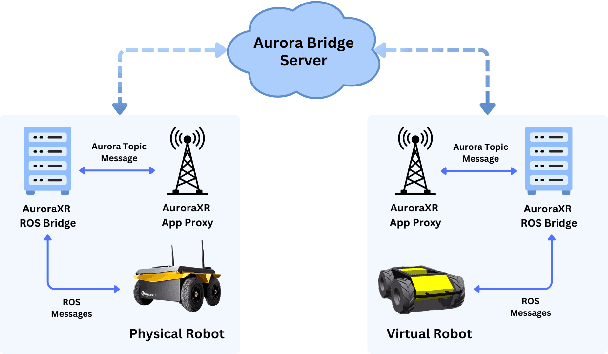
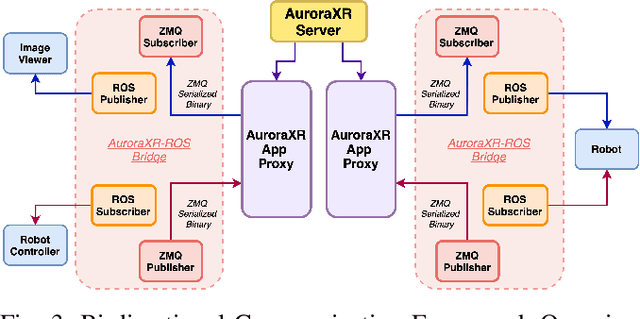
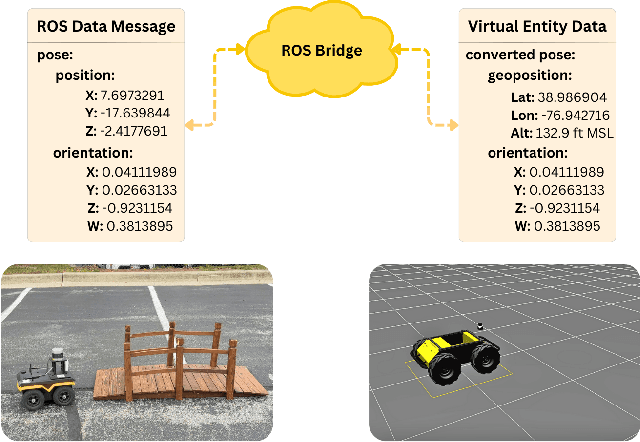
The increasing deployment of autonomous systems in complex environments necessitates efficient communication and task completion among multiple agents. This paper presents SERN (Simulation-Enhanced Realistic Navigation), a novel framework integrating virtual and physical environments for real-time collaborative decision-making in multi-robot systems. SERN addresses key challenges in asset deployment and coordination through a bi-directional communication framework using the AuroraXR ROS Bridge. Our approach advances the SOTA through accurate real-world representation in virtual environments using Unity high-fidelity simulator; synchronization of physical and virtual robot movements; efficient ROS data distribution between remote locations; and integration of SOTA semantic segmentation for enhanced environmental perception. Our evaluations show a 15% to 24% improvement in latency and up to a 15% increase in processing efficiency compared to traditional ROS setups. Real-world and virtual simulation experiments with multiple robots demonstrate synchronization accuracy, achieving less than 5 cm positional error and under 2-degree rotational error. These results highlight SERN's potential to enhance situational awareness and multi-agent coordination in diverse, contested environments.
On games and simulators as a platform for development of artificial intelligence for command and control
Oct 21, 2021
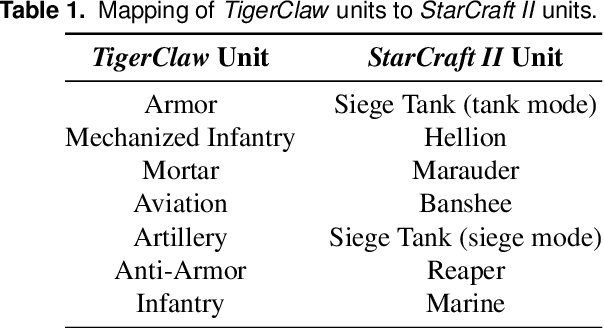
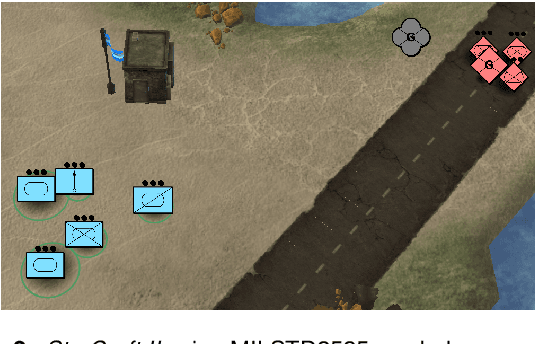
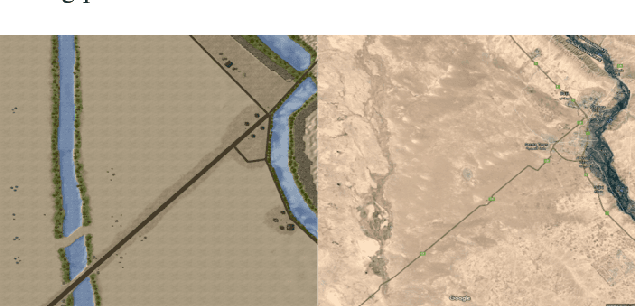
Games and simulators can be a valuable platform to execute complex multi-agent, multiplayer, imperfect information scenarios with significant parallels to military applications: multiple participants manage resources and make decisions that command assets to secure specific areas of a map or neutralize opposing forces. These characteristics have attracted the artificial intelligence (AI) community by supporting development of algorithms with complex benchmarks and the capability to rapidly iterate over new ideas. The success of artificial intelligence algorithms in real-time strategy games such as StarCraft II have also attracted the attention of the military research community aiming to explore similar techniques in military counterpart scenarios. Aiming to bridge the connection between games and military applications, this work discusses past and current efforts on how games and simulators, together with the artificial intelligence algorithms, have been adapted to simulate certain aspects of military missions and how they might impact the future battlefield. This paper also investigates how advances in virtual reality and visual augmentation systems open new possibilities in human interfaces with gaming platforms and their military parallels.