 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAM-Seg: A Continuous-valued Embedding Approach for Semantic Image Generation
Mar 19, 2025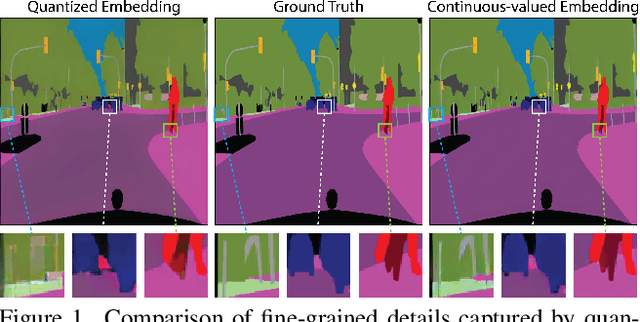
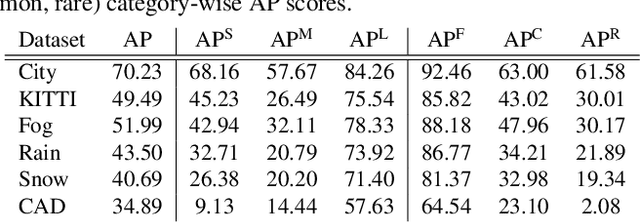
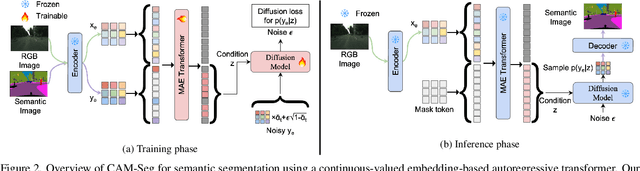
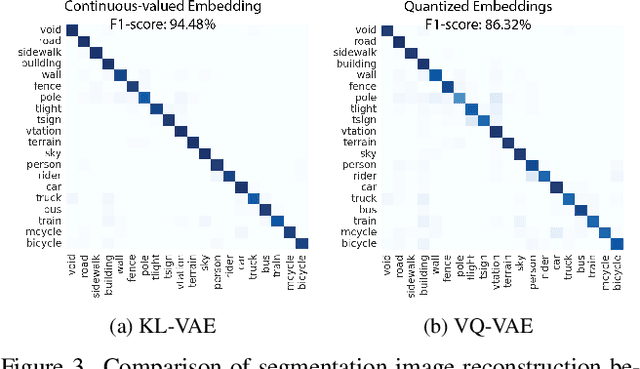
Traditional transformer-based semantic segmentation relies on quantized embeddings. However, our analysis reveals that autoencoder accuracy on segmentation mask using quantized embeddings (e.g. VQ-VAE) is 8% lower than continuous-valued embeddings (e.g. KL-VAE). Motivated by this, we propose a continuous-valued embedding framework for semantic segmentation. By reformulating semantic mask generation as a continuous image-to-embedding diffusion process, our approach eliminates the need for discrete latent representations while preserving fine-grained spatial and semantic details. Our key contribution includes a diffusion-guided autoregressive transformer that learns a continuous semantic embedding space by modeling long-range dependencies in image features. Our framework contains a unified architecture combining a VAE encoder for continuous feature extraction, a diffusion-guided transformer for conditioned embedding generation, and a VAE decoder for semantic mask reconstruction. Our setting facilitates zero-shot domain adaptation capabilities enabled by the continuity of the embedding space. Experiments across diverse datasets (e.g., Cityscapes and domain-shifted variants) demonstrate state-of-the-art robustness to distribution shifts, including adverse weather (e.g., fog, snow) and viewpoint variations. Our model also exhibits strong noise resilience, achieving robust performance ($\approx$ 95% AP compared to baseline) under gaussian noise, moderate motion blur, and moderate brightness/contrast variations, while experiencing only a moderate impact ($\approx$ 90% AP compared to baseline) from 50% salt and pepper noise, saturation and hue shifts. Code available: https://github.com/mahmed10/CAMSS.git
SERN: Simulation-Enhanced Realistic Navigation for Multi-Agent Robotic Systems in Contested Environments
Oct 22, 2024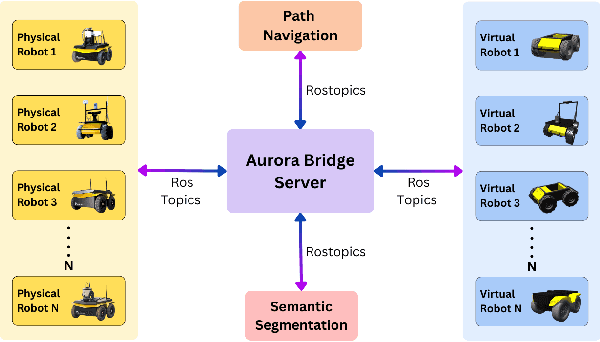
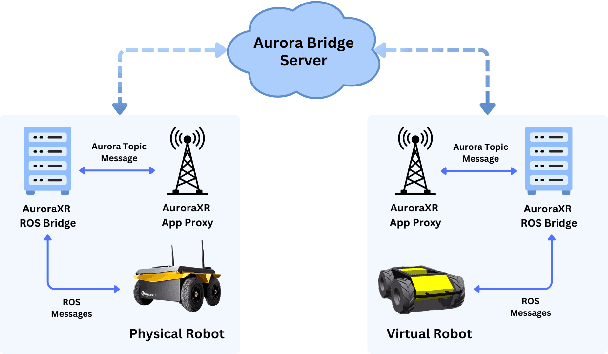
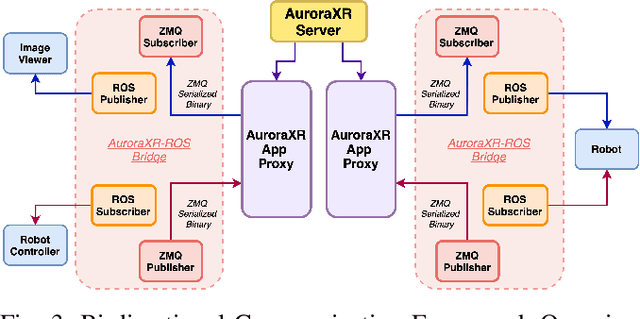
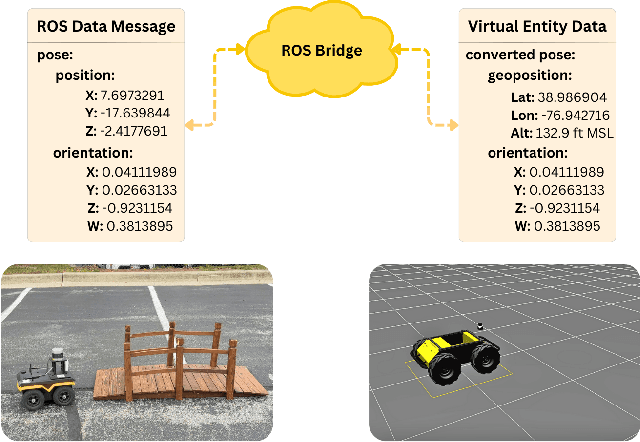
The increasing deployment of autonomous systems in complex environments necessitates efficient communication and task completion among multiple agents. This paper presents SERN (Simulation-Enhanced Realistic Navigation), a novel framework integrating virtual and physical environments for real-time collaborative decision-making in multi-robot systems. SERN addresses key challenges in asset deployment and coordination through a bi-directional communication framework using the AuroraXR ROS Bridge. Our approach advances the SOTA through accurate real-world representation in virtual environments using Unity high-fidelity simulator; synchronization of physical and virtual robot movements; efficient ROS data distribution between remote locations; and integration of SOTA semantic segmentation for enhanced environmental perception. Our evaluations show a 15% to 24% improvement in latency and up to a 15% increase in processing efficiency compared to traditional ROS setups. Real-world and virtual simulation experiments with multiple robots demonstrate synchronization accuracy, achieving less than 5 cm positional error and under 2-degree rotational error. These results highlight SERN's potential to enhance situational awareness and multi-agent coordination in diverse, contested environments.
Novel Categories Discovery from probability matrix perspective
Jul 07, 2023Novel Categories Discovery (NCD) tackles the open-world problem of classifying known and clustering novel categories based on the class semantics using partial class space annotated data. Unlike traditional pseudo-label and retraining, we investigate NCD from the novel data probability matrix perspective. We leverage the connection between NCD novel data sampling with provided novel class Multinoulli (categorical) distribution and hypothesize to implicitly achieve semantic-based novel data clustering by learning their class distribution. We propose novel constraints on first-order (mean) and second-order (covariance) statistics of probability matrix features while applying instance-wise information constraints. In particular, we align the neuron distribution (activation patterns) under a large batch of Monte-Carlo novel data sampling by matching their empirical features mean and covariance with the provided Multinoulli-distribution. Simultaneously, we minimize entropy and enforce prediction consistency for each instance. Our simple approach successfully realizes semantic-based novel data clustering provided the semantic similarity between label-unlabeled classes. We demonstrate the discriminative capacity of our approaches in image and video modalities. Moreover, we perform extensive ablation studies regarding data, networks, and our framework components to provide better insights. Our approach maintains ~94%, ~93%, and ~85%, classification accuracy in labeled data while achieving ~90%, ~84%, and ~72% clustering accuracy for novel categories for Cifar10, UCF101, and MPSC-ARL datasets that matches state-of-the-art approaches without any external clustering.
NEV-NCD: Negative Learning, Entropy, and Variance regularization based novel action categories discovery
Apr 14, 2023



Novel Categories Discovery (NCD) facilitates learning from a partially annotated label space and enables deep learning (DL) models to operate in an open-world setting by identifying and differentiating instances of novel classes based on the labeled data notions. One of the primary assumptions of NCD is that the novel label space is perfectly disjoint and can be equipartitioned, but it is rarely realized by most NCD approaches in practice. To better align with this assumption, we propose a novel single-stage joint optimization-based NCD method, Negative learning, Entropy, and Variance regularization NCD (NEV-NCD). We demonstrate the efficacy of NEV-NCD in previously unexplored NCD applications of video action recognition (VAR) with the public UCF101 dataset and a curated in-house partial action-space annotated multi-view video dataset. We perform a thorough ablation study by varying the composition of final joint loss and associated hyper-parameters. During our experiments with UCF101 and multi-view action dataset, NEV-NCD achieves ~ 83% classification accuracy in test instances of labeled data. NEV-NCD achieves ~ 70% clustering accuracy over unlabeled data outperforming both naive baselines (by ~ 40%) and state-of-the-art pseudo-labeling-based approaches (by ~ 3.5%) over both datasets. Further, we propose to incorporate optional view-invariant feature learning with the multiview dataset to identify novel categories from novel viewpoints. Our additional view-invariance constraint improves the discriminative accuracy for both known and unknown categories by ~ 10% for novel viewpoints.
Language Representation Models for Fine-Grained Sentiment Classification
May 27, 2020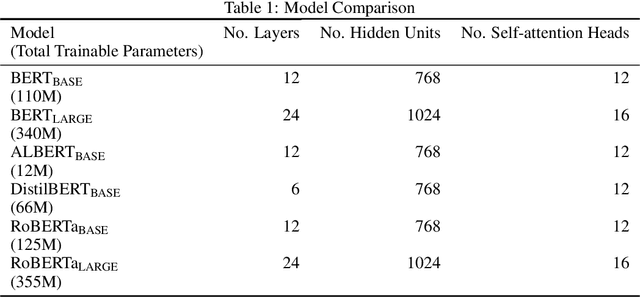
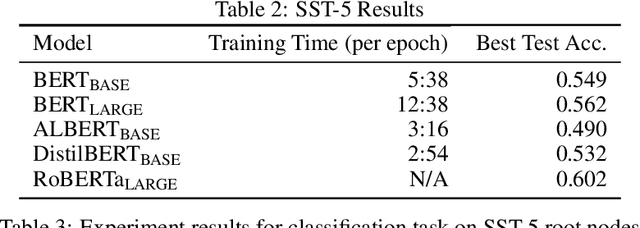
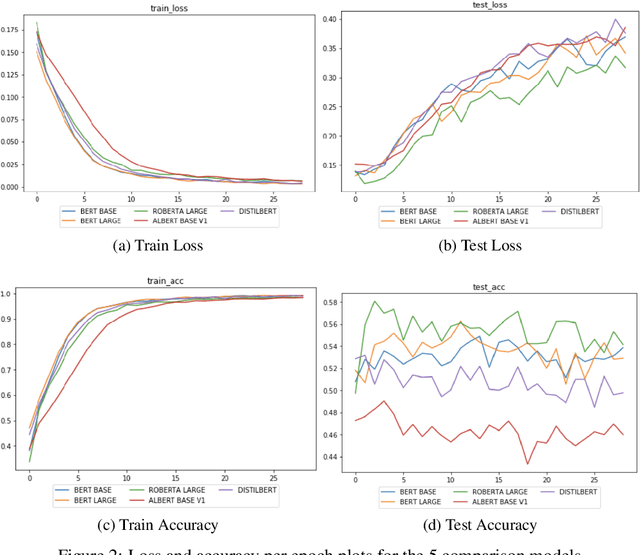
Sentiment classification is a quickly advancing field of study with applications in almost any field. While various models and datasets have shown high accuracy inthe task of binary classification, the task of fine-grained sentiment classification is still an area with room for significant improvement. Analyzing the SST-5 dataset,previous work by Munikar et al. (2019) showed that the embedding tool BERT allowed a simple model to achieve state-of-the-art accuracy. Since that paper, several BERT alternatives have been published, with three primary ones being AlBERT (Lan et al., 2019), DistilBERT (Sanh et al. 2019), and RoBERTa (Liu etal. 2019). While these models report some improvement over BERT on the popular benchmarks GLUE, SQuAD, and RACE, they have not been applied to the fine-grained classification task. In this paper, we examine whether the improvements hold true when applied to a novel task, by replicating the BERT model from Munikar et al., and swapping the embedding layer to the alternative models. Over the experiments, we found that AlBERT suffers significantly more accuracy loss than reported on other tasks, DistilBERT has accuracy loss similar to their reported loss on other tasks while being the fastest model to train, and RoBERTa reaches anew state-of-the-art accuracy for prediction on the SST-5 root level (60.2%).