 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Reinforcement Learning with Control-Theoretic Safety Guarantees for Dynamic Network Bridging
Paper and Code
Apr 02, 2024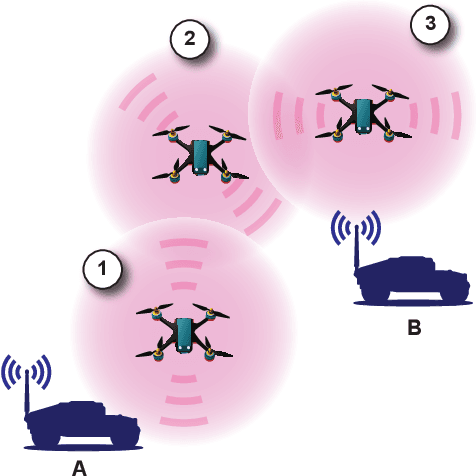

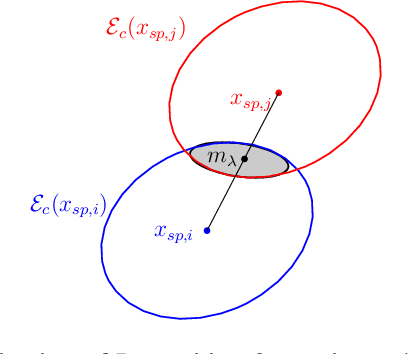

Addressing complex cooperative tasks in safety-critical environments poses significant challenges for Multi-Agent Systems, especially under conditions of partial observability. This work introduces a hybrid approach that integrates Multi-Agent Reinforcement Learning with control-theoretic methods to ensure safe and efficient distributed strategies. Our contributions include a novel setpoint update algorithm that dynamically adjusts agents' positions to preserve safety conditions without compromising the mission's objectives. Through experimental validation, we demonstrate significant advantages over conventional MARL strategies, achieving comparable task performance with zero safety violations. Our findings indicate that integrating safe control with learning approaches not only enhances safety compliance but also achieves good performance in mission objectives.