 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Construction Distributions Shape Formal Language Learning In German BabyLMs?
Mar 14, 2025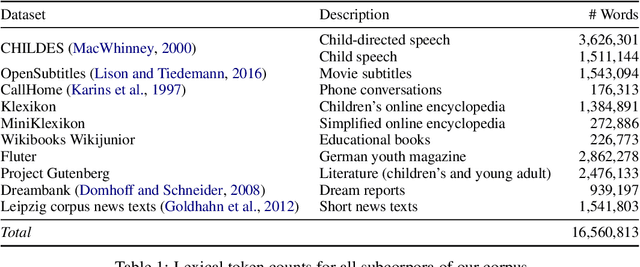
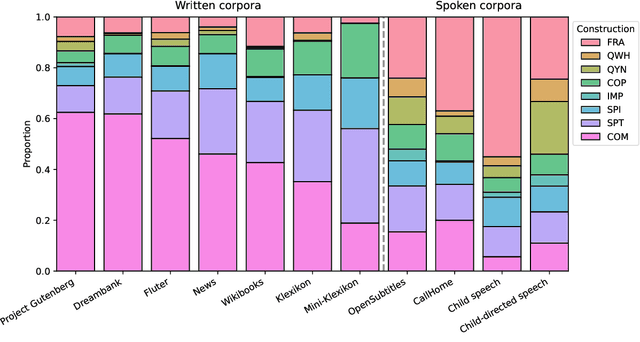
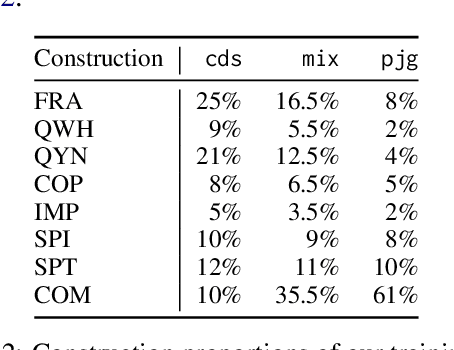
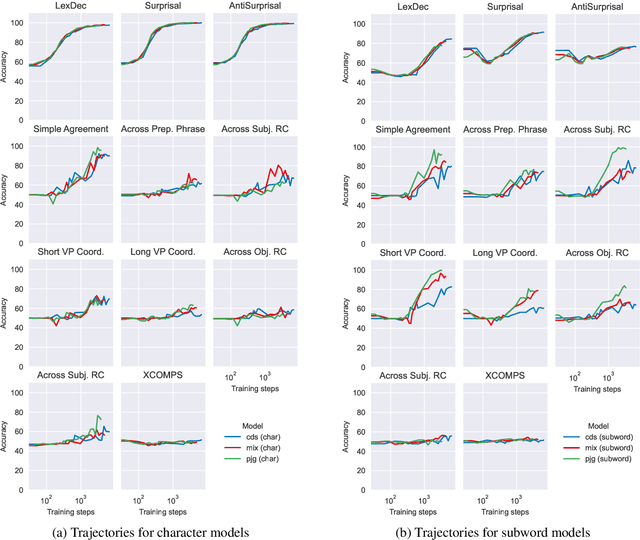
We analyze the influence of utterance-level construction distributions in German child-directed speech on the resulting formal linguistic competence and the underlying learning trajectories for small language models trained on a novel collection of developmentally plausible language data for German. We find that trajectories are surprisingly robust for markedly different distributions of constructions in the training data, which have little effect on final accuracies and almost no effect on global learning trajectories. While syntax learning benefits from more complex utterances, lexical learning culminates in better scores with more fragmentary data. We argue that LMs trained on developmentally plausible data can contribute to debates on how rich or impoverished linguistic stimuli actually are.
Small Language Models Like Small Vocabularies: Probing the Linguistic Abilities of Grapheme- and Phoneme-Based Baby Llamas
Oct 02, 2024

Current language models use subword-based tokenization algorithms like Byte Pair Encoding, which put their validity as models of linguistic representations into question. In this paper, we explore the potential of tokenization-free, phoneme- and grapheme-based language models. We demonstrate that small models based on the Llama architecture can achieve strong linguistic performance on standard syntactic and novel lexical/phonetic benchmarks when trained with character-level vocabularies. We further show that phoneme-based models without any graphemic biases almost match grapheme-based models in standard tasks and novel evaluations. Our findings suggest a promising direction for creating more linguistically plausible language models that are better suited for computational studies of language acquisition and processing.
Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Apr 02, 2024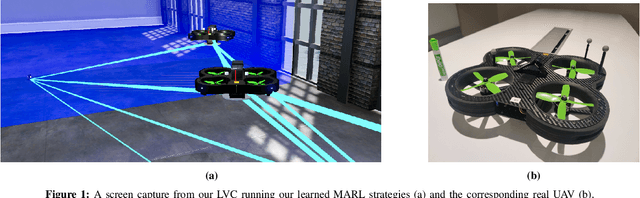
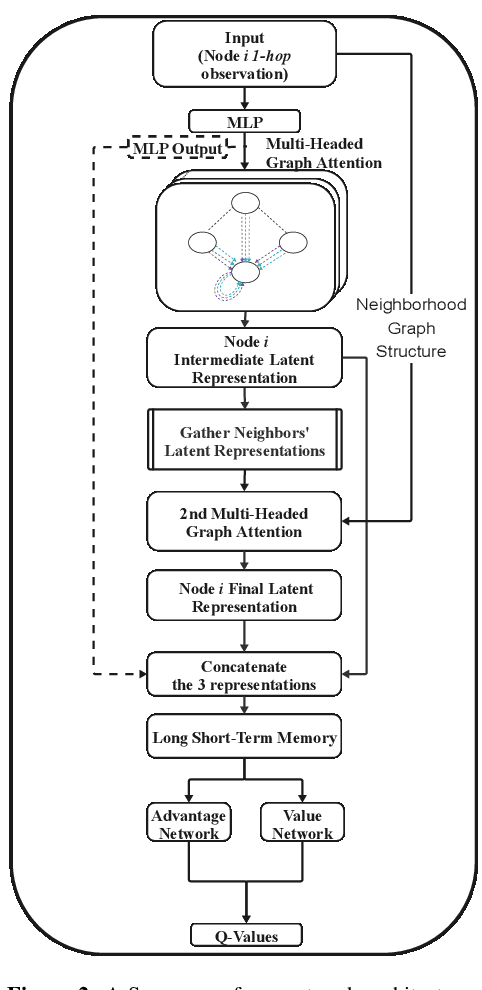
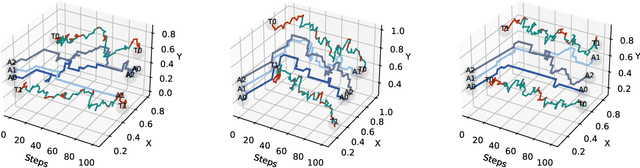
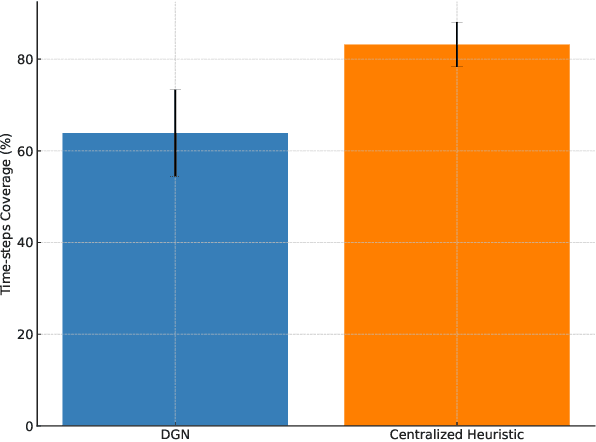
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.