 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgocentric Tactile and Proximity Sensors as Observation Priors for Humanoid Collision Avoidance
Apr 28, 2026Collision-free motion is often aided by tactile and proximity sensors distributed on the body of the robot due to their resistance to occlusion as opposed to external cameras. However, how to shape the sensor's properties, such as sensing coverage; type; and range, to enable avoidant behavior remains unclear. In this work, we present a reinforcement learning framework for whole-body collision avoidance on a humanoid H1-2 robot and use it to characterize how sensor properties shape learned avoidance behavior. Using dodgeball as a benchmark task, we ablate the properties of sensors distributed across the upper body of the robot and find that raw proximity measurements can substitute for explicit object localization provided the sensing range is sufficient and that sparse non-directional proximity signals outpace dense directional alternatives in sample efficiency.
Liquid Networks with Mixture Density Heads for Efficient Imitation Learning
Mar 28, 2026We compare liquid neural networks with mixture density heads against diffusion policies on Push-T, RoboMimic Can, and PointMaze under a shared-backbone comparison protocol that isolates policy-head effects under matched inputs, training budgets, and evaluation settings. Across tasks, liquid policies use roughly half the parameters (4.3M vs. 8.6M), achieve 2.4x lower offline prediction error, and run 1.8 faster at inference. In sample-efficiency experiments spanning 1% to 46.42% of training data, liquid models remain consistently more robust, with especially large gains in low-data and medium-data regimes. Closed-loop results on Push-T and PointMaze are directionally consistent with offline rankings but noisier, indicating that strong offline density modeling helps deployment while not fully determining closed-loop success. Overall, liquid recurrent multimodal policies provide a compact and practical alternative to iterative denoising for imitation learning.
Robotic Agentic Platform for Intelligent Electric Vehicle Disassembly
Mar 19, 2026Electric vehicles (EV) create an urgent need for scalable battery recycling, yet disassembly of EV battery packs remains largely manual due to high design variability. We present our Robotic Agentic Platform for Intelligent Disassembly (RAPID), designed to investigate perception-driven manipulation, flexible automation, and AI-assisted robot programming in realistic recycling scenarios. The system integrates a gantry-mounted industrial manipulator, RGB-D perception, and an automated nut-running tool for fastener removal on a full-scale EV battery pack. An open-vocabulary object detection pipeline achieves 0.9757 mAP50, enabling reliable identification of screws, nuts, busbars, and other components. We experimentally evaluate (n=204) three one-shot fastener removal strategies: taught-in poses (97% success rate, 24 min duration), one-shot vision execution (57%, 29 min), and visual servoing (83%, 36 min), comparing success rate and disassembly time for the battery's top cover fasteners. To support flexible interaction, we introduce agentic AI specifications for robotic disassembly tasks, allowing LLM agents to translate high-level instructions into robot actions through structured tool interfaces and ROS services. We evaluate SmolAgents with GPT-4o-mini and Qwen 3.5 9B/4B on edge hardware. Tool-based interfaces achieve 100% task completion, while automatic ROS service discovery shows 43.3% failure rates, highlighting the need for structured robot APIs for reliable LLM-driven control. This open-source platform enables systematic investigation of human-robot collaboration, agentic robot programming, and increasingly autonomous disassembly workflows, providing a practical foundation for research toward scalable robotic battery recycling.
Cutting the Cord: System Architecture for Low-Cost, GPU-Accelerated Bimanual Mobile Manipulation
Mar 10, 2026We present a bimanual mobile manipulator built on the open-source XLeRobot with integrated onboard compute for less than \$1300. Key contributions include: (1) optimized mechanical design maximizing stiffness-to-weight ratio, (2) a Tri-Bus power topology isolating compute from motor-induced voltage transients, and (3) embedded autonomy using NVIDIA Jetson Orin Nano for untethered operation. The platform enables teleoperation, autonomous SLAM navigation, and vision-based manipulation without external dependencies, providing a low-cost alternative for research and education in robotics and robot learning.
Characterization, Analytical Planning, and Hybrid Force Control for the Inspire RH56DFX Hand
Mar 09, 2026Commercially accessible dexterous robot hands are increasingly prevalent, but many remain difficult to use as scientific instruments. For example, the Inspire RH56DFX hand exposes only uncalibrated proprioceptive information and shows unreliable contact behavior at high speed (up to 1618% force limit overshoot). Furthermore, its underactuated, coupled finger linkages make antipodal grasps non-trivial. We contribute three improvements to the Inspire RH56DFX to transform it from a black-box device to a research tool: (1) hardware characterization (force calibration, latency, and overshoot), (2) a sim2real validated MuJoCo model for analytical width-to-grasp planning, and (3) a hybrid, closed-loop speed-force grasp controller. We validate these components on peg-in-hole insertion, achieving 65% success and outperforming a wrist-force-only baseline of 10% and on 300 grasps across 15 physically diverse objects, achieving 87% success and outperforming plan-free grasps and learned grasps. Our approach is modular, designed for compatibility with external object detectors and vision-language models for width & force estimation and high-level planning, and provides an interpretable and immediately deployable interface for dexterous manipulation with the Inspire RH56DFX hand, open-sourced at this website https://correlllab.github.io/rh56dfx.html.
FAME: Force-Adaptive RL for Expanding the Manipulation Envelope of a Full-Scale Humanoid
Mar 09, 2026Maintaining balance under external hand forces is critical for humanoid bimanual manipulation, where interaction forces propagate through the kinematic chain and constrain the feasible manipulation envelope. We propose \textbf{FAME}, a force-adaptive reinforcement learning framework that conditions a standing policy on a learned latent context encoding upper-body joint configuration and bimanual interaction forces. During training, we apply diverse, spherically sampled 3D forces on each hand to inject disturbances in simulation together with an upper-body pose curriculum, exposing the policy to manipulation-induced perturbations across continuously varying arm configurations. At deployment, interaction forces are estimated from the robot dynamics and fed to the same encoder, enabling online adaptation without wrist force/torque sensors. In simulation across five fixed arm configurations with randomized hand forces and commanded base heights, FAME improves mean standing success to 73.84%, compared to 51.40% for the curriculum-only baseline and 29.44% for the base policy. We further deploy the learned policy on a full-scale Unitree H12 humanoid and evaluate robustness in representative load-interaction scenarios, including asymmetric single-arm load and symmetric bimanual load. Code and videos are available on https://fame10.github.io/Fame/
On the Dual-Use Dilemma in Physical Reasoning and Force
May 24, 2025



Humans learn how and when to apply forces in the world via a complex physiological and psychological learning process. Attempting to replicate this in vision-language models (VLMs) presents two challenges: VLMs can produce harmful behavior, which is particularly dangerous for VLM-controlled robots which interact with the world, but imposing behavioral safeguards can limit their functional and ethical extents. We conduct two case studies on safeguarding VLMs which generate forceful robotic motion, finding that safeguards reduce both harmful and helpful behavior involving contact-rich manipulation of human body parts. Then, we discuss the key implication of this result--that value alignment may impede desirable robot capabilities--for model evaluation and robot learning.
Unfettered Forceful Skill Acquisition with Physical Reasoning and Coordinate Frame Labeling
May 14, 2025Vision language models (VLMs) exhibit vast knowledge of the physical world, including intuition of physical and spatial properties, affordances, and motion. With fine-tuning, VLMs can also natively produce robot trajectories. We demonstrate that eliciting wrenches, not trajectories, allows VLMs to explicitly reason about forces and leads to zero-shot generalization in a series of manipulation tasks without pretraining. We achieve this by overlaying a consistent visual representation of relevant coordinate frames on robot-attached camera images to augment our query. First, we show how this addition enables a versatile motion control framework evaluated across four tasks (opening and closing a lid, pushing a cup or chair) spanning prismatic and rotational motion, an order of force and position magnitude, different camera perspectives, annotation schemes, and two robot platforms over 220 experiments, resulting in 51% success across the four tasks. Then, we demonstrate that the proposed framework enables VLMs to continually reason about interaction feedback to recover from task failure or incompletion, with and without human supervision. Finally, we observe that prompting schemes with visual annotation and embodied reasoning can bypass VLM safeguards. We characterize prompt component contribution to harmful behavior elicitation and discuss its implications for developing embodied reasoning. Our code, videos, and data are available at: https://scalingforce.github.io/.
Towards Forceful Robotic Foundation Models: a Literature Survey
Apr 16, 2025
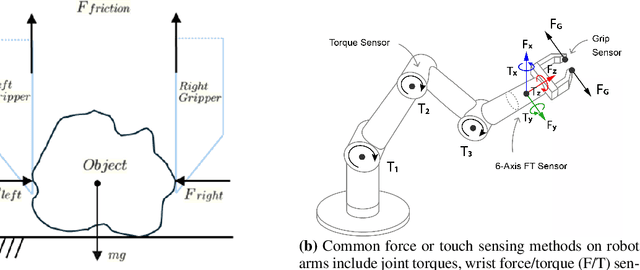


This article reviews contemporary methods for integrating force, including both proprioception and tactile sensing, in robot manipulation policy learning. We conduct a comparative analysis on various approaches for sensing force, data collection, behavior cloning, tactile representation learning, and low-level robot control. From our analysis, we articulate when and why forces are needed, and highlight opportunities to improve learning of contact-rich, generalist robot policies on the path toward highly capable touch-based robot foundation models. We generally find that while there are few tasks such as pouring, peg-in-hole insertion, and handling delicate objects, the performance of imitation learning models is not at a level of dynamics where force truly matters. Also, force and touch are abstract quantities that can be inferred through a wide range of modalities and are often measured and controlled implicitly. We hope that juxtaposing the different approaches currently in use will help the reader to gain a systemic understanding and help inspire the next generation of robot foundation models.
A Machine Learning Approach to Contact Localization in Variable Density Three-Dimensional Tactile Artificial Skin
Dec 01, 2024



Estimating the location of contact is a primary function of artificial tactile sensing apparatuses that perceive the environment through touch. Existing contact localization methods use flat geometry and uniform sensor distributions as a simplifying assumption, limiting their ability to be used on 3D surfaces with variable density sensing arrays. This paper studies contact localization on an artificial skin embedded with mutual capacitance tactile sensors, arranged non-uniformly in an unknown distribution along a semi-conical 3D geometry. A fully connected neural network is trained to localize the touching points on the embedded tactile sensors. The studied online model achieves a localization error of $5.7 \pm 3.0$ mm. This research contributes a versatile tool and robust solution for contact localization that is ambiguous in shape and internal sensor distribution.