 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization, Analytical Planning, and Hybrid Force Control for the Inspire RH56DFX Hand
Mar 09, 2026Commercially accessible dexterous robot hands are increasingly prevalent, but many remain difficult to use as scientific instruments. For example, the Inspire RH56DFX hand exposes only uncalibrated proprioceptive information and shows unreliable contact behavior at high speed (up to 1618% force limit overshoot). Furthermore, its underactuated, coupled finger linkages make antipodal grasps non-trivial. We contribute three improvements to the Inspire RH56DFX to transform it from a black-box device to a research tool: (1) hardware characterization (force calibration, latency, and overshoot), (2) a sim2real validated MuJoCo model for analytical width-to-grasp planning, and (3) a hybrid, closed-loop speed-force grasp controller. We validate these components on peg-in-hole insertion, achieving 65% success and outperforming a wrist-force-only baseline of 10% and on 300 grasps across 15 physically diverse objects, achieving 87% success and outperforming plan-free grasps and learned grasps. Our approach is modular, designed for compatibility with external object detectors and vision-language models for width & force estimation and high-level planning, and provides an interpretable and immediately deployable interface for dexterous manipulation with the Inspire RH56DFX hand, open-sourced at this website https://correlllab.github.io/rh56dfx.html.
On the Dual-Use Dilemma in Physical Reasoning and Force
May 24, 2025



Humans learn how and when to apply forces in the world via a complex physiological and psychological learning process. Attempting to replicate this in vision-language models (VLMs) presents two challenges: VLMs can produce harmful behavior, which is particularly dangerous for VLM-controlled robots which interact with the world, but imposing behavioral safeguards can limit their functional and ethical extents. We conduct two case studies on safeguarding VLMs which generate forceful robotic motion, finding that safeguards reduce both harmful and helpful behavior involving contact-rich manipulation of human body parts. Then, we discuss the key implication of this result--that value alignment may impede desirable robot capabilities--for model evaluation and robot learning.
Unfettered Forceful Skill Acquisition with Physical Reasoning and Coordinate Frame Labeling
May 14, 2025Vision language models (VLMs) exhibit vast knowledge of the physical world, including intuition of physical and spatial properties, affordances, and motion. With fine-tuning, VLMs can also natively produce robot trajectories. We demonstrate that eliciting wrenches, not trajectories, allows VLMs to explicitly reason about forces and leads to zero-shot generalization in a series of manipulation tasks without pretraining. We achieve this by overlaying a consistent visual representation of relevant coordinate frames on robot-attached camera images to augment our query. First, we show how this addition enables a versatile motion control framework evaluated across four tasks (opening and closing a lid, pushing a cup or chair) spanning prismatic and rotational motion, an order of force and position magnitude, different camera perspectives, annotation schemes, and two robot platforms over 220 experiments, resulting in 51% success across the four tasks. Then, we demonstrate that the proposed framework enables VLMs to continually reason about interaction feedback to recover from task failure or incompletion, with and without human supervision. Finally, we observe that prompting schemes with visual annotation and embodied reasoning can bypass VLM safeguards. We characterize prompt component contribution to harmful behavior elicitation and discuss its implications for developing embodied reasoning. Our code, videos, and data are available at: https://scalingforce.github.io/.
Towards Forceful Robotic Foundation Models: a Literature Survey
Apr 16, 2025
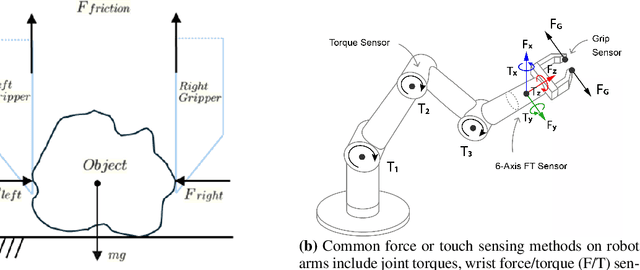


This article reviews contemporary methods for integrating force, including both proprioception and tactile sensing, in robot manipulation policy learning. We conduct a comparative analysis on various approaches for sensing force, data collection, behavior cloning, tactile representation learning, and low-level robot control. From our analysis, we articulate when and why forces are needed, and highlight opportunities to improve learning of contact-rich, generalist robot policies on the path toward highly capable touch-based robot foundation models. We generally find that while there are few tasks such as pouring, peg-in-hole insertion, and handling delicate objects, the performance of imitation learning models is not at a level of dynamics where force truly matters. Also, force and touch are abstract quantities that can be inferred through a wide range of modalities and are often measured and controlled implicitly. We hope that juxtaposing the different approaches currently in use will help the reader to gain a systemic understanding and help inspire the next generation of robot foundation models.
Just Add Force for Contact-Rich Robot Policies
Oct 17, 2024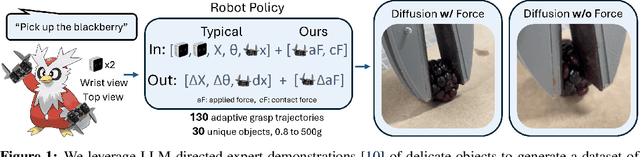
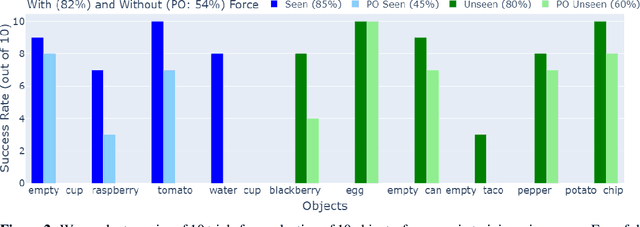
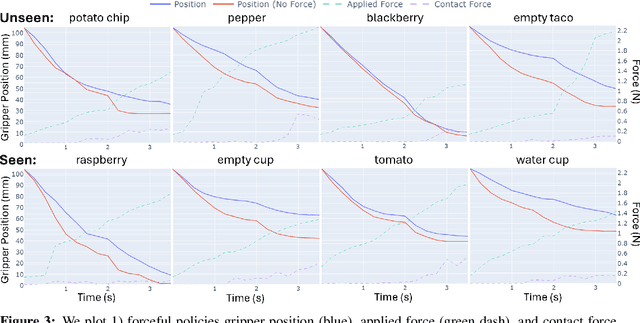
Robot trajectories used for learning end-to-end robot policies typically contain end-effector and gripper position, workspace images, and language. Policies learned from such trajectories are unsuitable for delicate grasping, which require tightly coupled and precise gripper force and gripper position. We collect and make publically available 130 trajectories with force feedback of successful grasps on 30 unique objects. Our current-based method for sensing force, albeit noisy, is gripper-agnostic and requires no additional hardware. We train and evaluate two diffusion policies: one with (forceful) the collected force feedback and one without (position-only). We find that forceful policies are superior to position-only policies for delicate grasping and are able to generalize to unseen delicate objects, while reducing grasp policy latency by near 4x, relative to LLM-based methods. With our promising results on limited data, we hope to signal to others to consider investing in collecting force and other such tactile information in new datasets, enabling more robust, contact-rich manipulation in future robot foundation models. Our data, code, models, and videos are viewable at https://justaddforce.github.io/.
DeliGrasp: Inferring Object Mass, Friction, and Compliance with LLMs for Adaptive and Minimally Deforming Grasp Policies
Mar 12, 2024



Large language models (LLMs) can provide rich physical descriptions of most worldly objects, allowing robots to achieve more informed and capable grasping. We leverage LLMs' common sense physical reasoning and code-writing abilities to infer an object's physical characteristics--mass $m$, friction coefficient $\mu$, and spring constant $k$--from a semantic description, and then translate those characteristics into an executable adaptive grasp policy. Using a current-controllable, two-finger gripper with a built-in depth camera, we demonstrate that LLM-generated, physically-grounded grasp policies outperform traditional grasp policies on a custom benchmark of 12 delicate and deformable items including food, produce, toys, and other everyday items, spanning two orders of magnitude in mass and required pick-up force. We also demonstrate how compliance feedback from DeliGrasp policies can aid in downstream tasks such as measuring produce ripeness. Our code and videos are available at: https://deligrasp.github.io