 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Sensing Coverage and Compliance of 3D-Printed Artificial Skins Through Multi-Modal Sensing and Soft Materials
Apr 28, 20263D-printed artificial skins are a scalable approach to whole-body tactile and proximity coverage, but prior implementations have been limited to unimodal sensing and rigid materials. To improve the practical usability of 3D-printed artificial skins, we present a hybrid time-of-flight (ToF) and self-capacitance (SC) sensing skin that demonstrates multi-modal sensing integration, soft compliant coverings for impact absorption and pressure sensing, and a streamlined electrical interface between printed conductive traces and external electronics. We show that combining ToF and SC modalities enables contact detection, scene reconstruction, and pressure-correlated tactile responses with the compliant covering by deploying six artificial skin units with 40 sensing elements over an FR3 robot arm.
Form-Fitting, Large-Area Sensor Mounting for Obstacle Detection
Mar 24, 2026We introduce a low-cost method for mounting sensors onto robot links for large-area sensing coverage that does not require the sensor's positions or orientations to be calibrated before use. Using computer aided design (CAD), a robot skin covering, or skin unit, can be procedurally generated to fit around a nondevelopable surface, a 3D surface that cannot be flattened into a 2D plane without distortion, of a robot. The skin unit embeds mounts for printed circuit boards of any size to keep sensors in fixed and known locations. We demonstrate our method by constructing point cloud images of obstacles within the proximity of a Franka Research 3 robot's operational environment using an array of time of flight (ToF) imagers mounted on a printed skin unit and attached to the robot arm.
Design of a Robot-Assisted Chemical Dialysis System
Mar 10, 2026Scientists perform diverse manual procedures that are tedious and laborious. Such procedures are considered a bottleneck for modern experimental science, as they consume time and increase burdens in fields including material science and medicine. We employ a user-centered approach to designing a robot-assisted system for dialysis, a common multi-day purification method used in polymer and protein synthesis. Through two usability studies, we obtain participant feedback and revise design requirements to develop the final system that satisfies scientists' needs and has the potential for applications in other experimental workflows. We anticipate that integration of this system into real synthesis procedures in a chemical wet lab will decrease workload on scientists during long experimental procedures and provide an effective approach to designing more systems that have the potential to accelerate scientific discovery and liberate scientists from tedious labor.
Design, Mapping, and Contact Anticipation with 3D-printed Whole-Body Tactile and Proximity Sensors
Mar 05, 2026Robots operating in dynamic and shared environments benefit from anticipating contact before it occurs. We present GenTact-Prox, a fully 3D-printed artificial skin that integrates tactile and proximity sensing for contact detection and anticipation. The artificial skin platform is modular in design, procedurally generated to fit any robot morphology, and can cover the whole body of a robot. The skin achieved detection ranges of up to 18 cm during evaluation. To characterize how robots perceive nearby space through this skin, we introduce a data-driven framework for mapping the Perisensory Space -- the body-centric volume of space around the robot where sensors provide actionable information for contact anticipation. We demonstrate this approach on a Franka Research 3 robot equipped with five GenTact-Prox units, enabling online object-aware operation and contact prediction.
GenTact Toolbox: A Computational Design Pipeline to Procedurally Generate Context-Driven 3D Printed Whole-Body Tactile Skins
Dec 01, 2024Developing whole-body tactile skins for robots remains a challenging task, as existing solutions often prioritize modular, one-size-fits-all designs, which, while versatile, fail to account for the robot's specific shape and the unique demands of its operational context. In this work, we introduce the GenTact Toolbox, a computational pipeline for creating versatile whole-body tactile skins tailored to both robot shape and application domain. Our pipeline includes procedural mesh generation for conforming to a robot's topology, task-driven simulation to refine sensor distribution, and multi-material 3D printing for shape-agnostic fabrication. We validate our approach by creating and deploying six capacitive sensing skins on a Franka Research 3 robot arm in a human-robot interaction scenario. This work represents a shift from one-size-fits-all tactile sensors toward context-driven, highly adaptable designs that can be customized for a wide range of robotic systems and applications.
A Sensor Position Localization Method for Flexible, Non-Uniform Capacitive Tactile Sensor Arrays
Dec 01, 2024



Tactile sensing is used in robotics to obtain real-time feedback during physical interactions. Fine object manipulation is a robotic application that benefits from a high density of sensors to accurately estimate object pose, whereas a low sensing resolution is sufficient for collision detection. Introducing variable sensing resolution into a single tactile sensing array can increase the range of tactile use cases, but also invokes challenges in localizing internal sensor positions. In this work, we present a mutual capacitance sensor array with variable sensor density, VARSkin, along with a localization method that determines the position of each sensor in the non-uniform array. When tested on two distinct artificial skin patches with concealed sensor layouts, our method achieves a localization accuracy within $\pm 2mm$. We also provide a comprehensive error analysis, offering strategies for further precision improvement.
A Machine Learning Approach to Contact Localization in Variable Density Three-Dimensional Tactile Artificial Skin
Dec 01, 2024



Estimating the location of contact is a primary function of artificial tactile sensing apparatuses that perceive the environment through touch. Existing contact localization methods use flat geometry and uniform sensor distributions as a simplifying assumption, limiting their ability to be used on 3D surfaces with variable density sensing arrays. This paper studies contact localization on an artificial skin embedded with mutual capacitance tactile sensors, arranged non-uniformly in an unknown distribution along a semi-conical 3D geometry. A fully connected neural network is trained to localize the touching points on the embedded tactile sensors. The studied online model achieves a localization error of $5.7 \pm 3.0$ mm. This research contributes a versatile tool and robust solution for contact localization that is ambiguous in shape and internal sensor distribution.
CAT-RRT: Motion Planning that Admits Contact One Link at a Time
Oct 09, 2023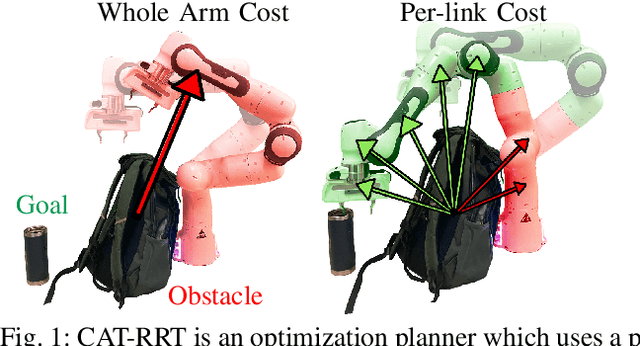



Current motion planning approaches rely on binary collision checking to evaluate the validity of a state and thereby dictate where the robot is allowed to move. This approach leaves little room for robots to engage in contact with an object, as is often necessary when operating in densely cluttered spaces. In this work, we propose an alternative method that considers contact states as high-cost states that the robot should avoid but can traverse if necessary to complete a task. More specifically, we introduce Contact Admissible Transition-based Rapidly exploring Random Trees (CAT-RRT), a planner that uses a novel per-link cost heuristic to find a path by traversing high-cost obstacle regions. Through extensive testing, we find that state-of-the-art optimization planners tend to over-explore low-cost states, which leads to slow and inefficient convergence to contact regions. Conversely, CAT-RRT searches both low and high-cost regions simultaneously with an adaptive thresholding mechanism carried out at each robot link. This leads to paths with a balance between efficiency, path length, and contact cost.
Contact Anticipation for Physical Human-Robot Interaction with Robotic Manipulators using Onboard Proximity Sensors
Nov 16, 2021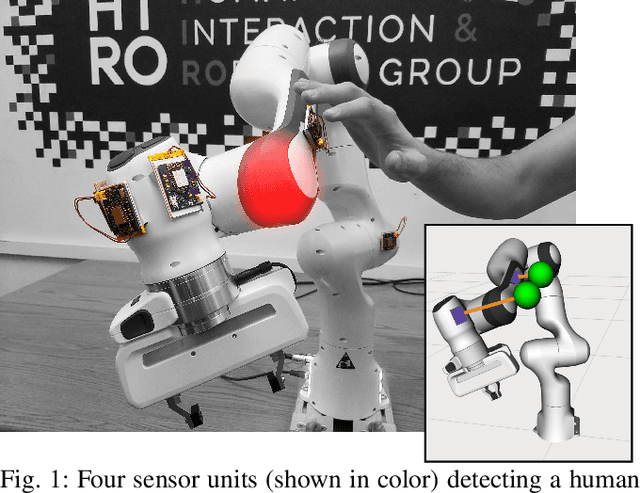
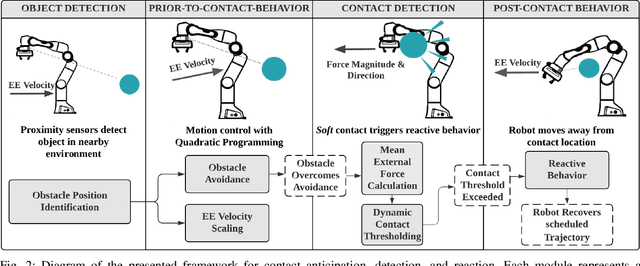
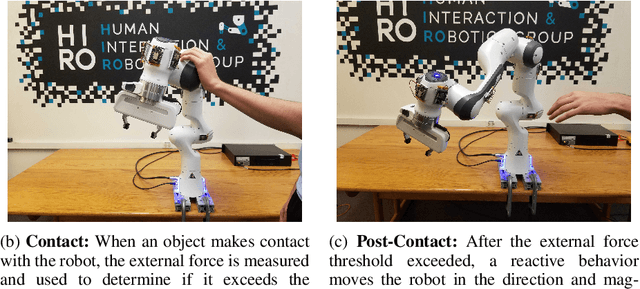
In this paper, we present a framework that unites obstacle avoidance and deliberate physical interaction for robotic manipulators. As humans and robots begin to coexist in work and household environments, pure collision avoidance is insufficient, as human-robot contact is inevitable and, in some situations, desired. Our work enables manipulators to anticipate, detect, and act on contact. To achieve this, we allow limited deviation from the robot's original trajectory through velocity reduction and motion restrictions. Then, if contact occurs, a robot can detect it and maneuver based on a novel dynamic contact thresholding algorithm. The core contribution of this work is dynamic contact thresholding, which allows a manipulator with onboard proximity sensors to track nearby objects and reduce contact forces in anticipation of a collision. Our framework elicits natural behavior during physical human-robot interaction. We evaluate our system on a variety of scenarios using the Franka Emika Panda robot arm; collectively, our results demonstrate that our contribution is not only able to avoid and react on contact, but also anticipate it.
Self-Contained Kinematic Calibration of a Novel Whole-Body Artificial Skin for Human-Robot Collaboration
Oct 27, 2021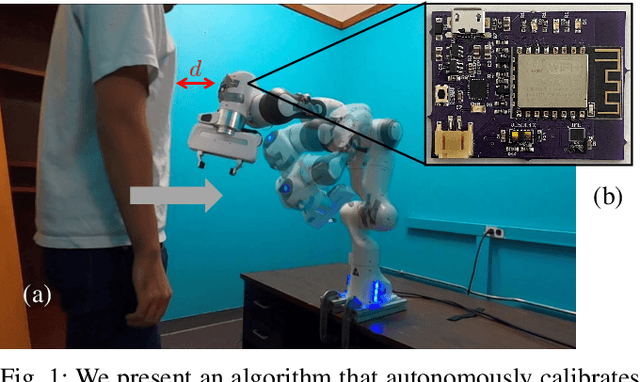
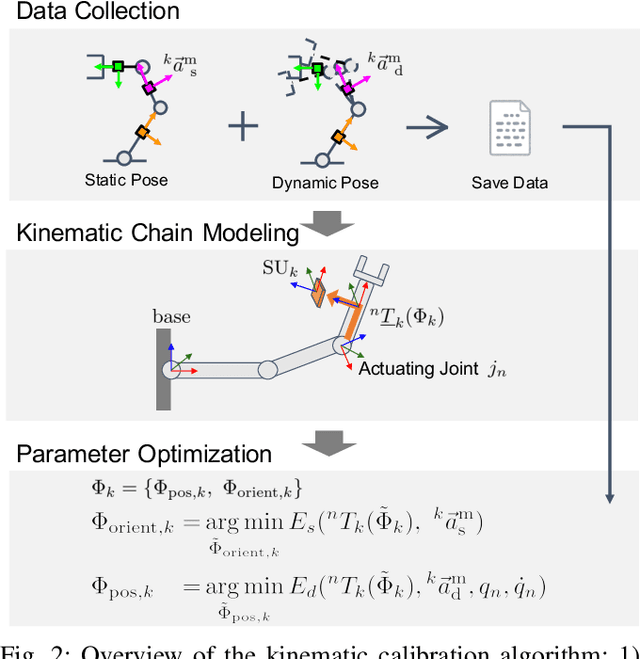
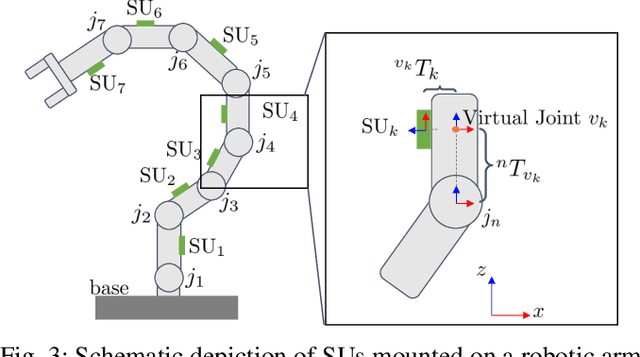
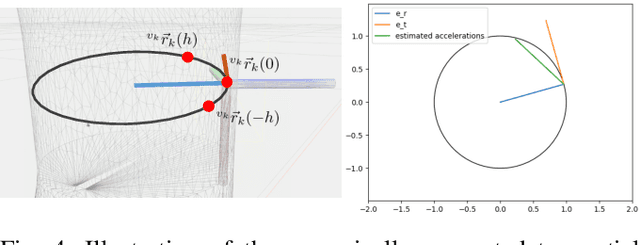
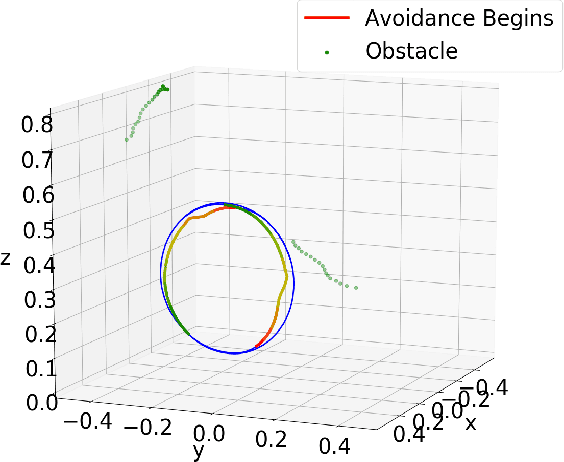
In this paper, we present an accelerometer-based kinematic calibration algorithm to accurately estimate the pose of multiple sensor units distributed along a robot body. Our approach is self-contained, can be used on any robot provided with a Denavit-Hartenberg kinematic model, and on any skin equipped with Inertial Measurement Units (IMUs). To validate the proposed method, we first conduct extensive experimentation in simulation and demonstrate a sub-cm positional error from ground truth data --an improvement of six times with respect to prior work; subsequently, we then perform a real-world evaluation on a seven degrees-of-freedom collaborative platform. For this purpose, we additionally introduce a novel design for a stand-alone artificial skin equipped with an IMU for use with the proposed algorithm and a proximity sensor for sensing distance to nearby objects. In conclusion, in this work, we demonstrate seamless integration between a novel hardware design, an accurate calibration method, and preliminary work on applications: the high positional accuracy effectively enables to locate distributed proximity data and allows for a distributed avoidance controller to safely avoid obstacles and people without the need of additional sensing.