 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Anticipation for Physical Human-Robot Interaction with Robotic Manipulators using Onboard Proximity Sensors
Nov 16, 2021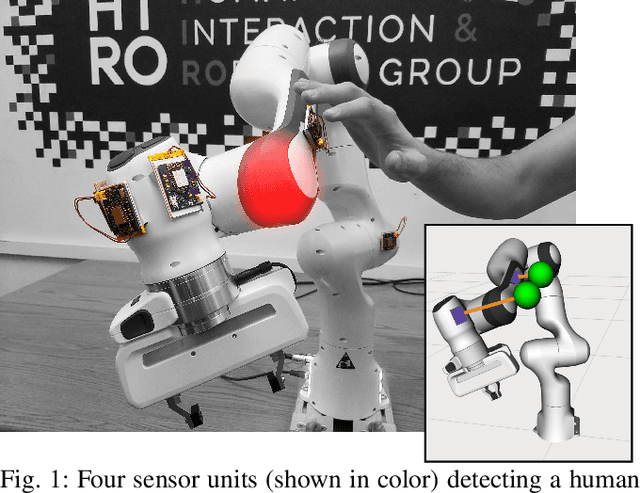
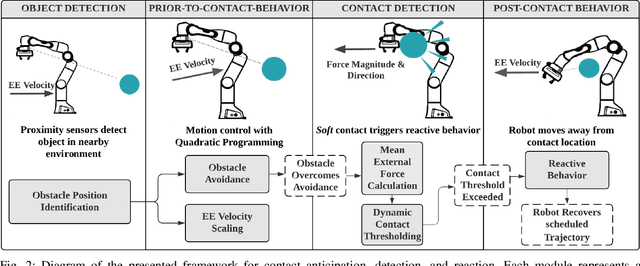
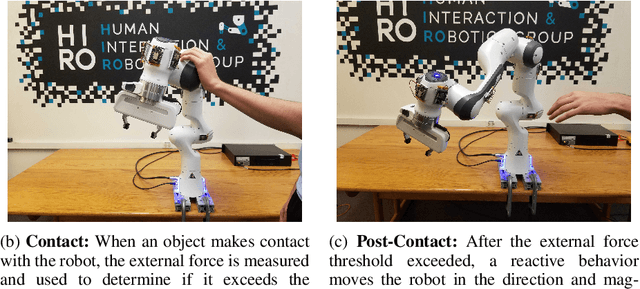
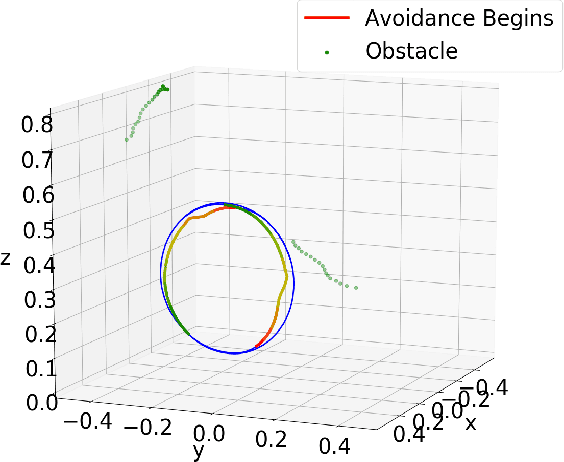
In this paper, we present a framework that unites obstacle avoidance and deliberate physical interaction for robotic manipulators. As humans and robots begin to coexist in work and household environments, pure collision avoidance is insufficient, as human-robot contact is inevitable and, in some situations, desired. Our work enables manipulators to anticipate, detect, and act on contact. To achieve this, we allow limited deviation from the robot's original trajectory through velocity reduction and motion restrictions. Then, if contact occurs, a robot can detect it and maneuver based on a novel dynamic contact thresholding algorithm. The core contribution of this work is dynamic contact thresholding, which allows a manipulator with onboard proximity sensors to track nearby objects and reduce contact forces in anticipation of a collision. Our framework elicits natural behavior during physical human-robot interaction. We evaluate our system on a variety of scenarios using the Franka Emika Panda robot arm; collectively, our results demonstrate that our contribution is not only able to avoid and react on contact, but also anticipate it.
Self-Contained Kinematic Calibration of a Novel Whole-Body Artificial Skin for Human-Robot Collaboration
Oct 27, 2021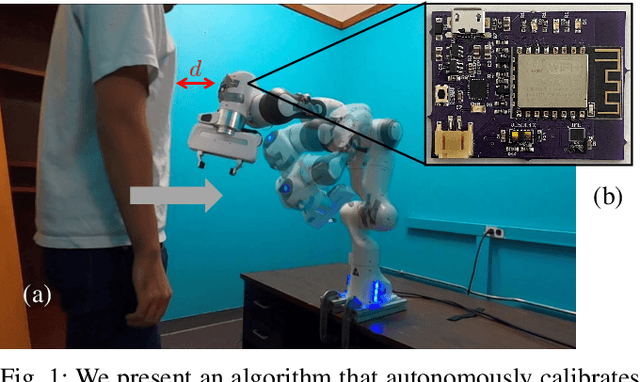
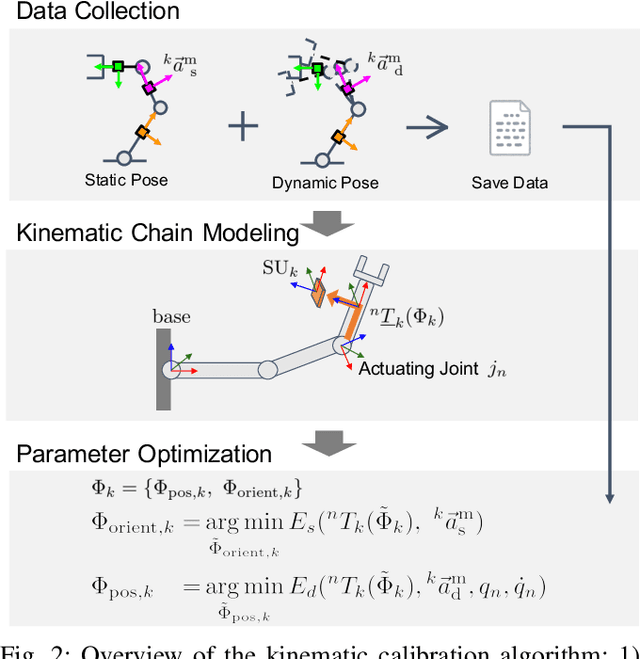
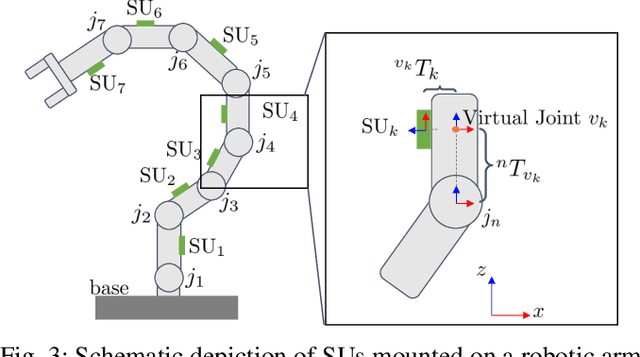
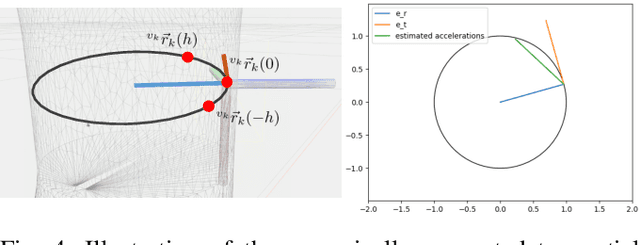
In this paper, we present an accelerometer-based kinematic calibration algorithm to accurately estimate the pose of multiple sensor units distributed along a robot body. Our approach is self-contained, can be used on any robot provided with a Denavit-Hartenberg kinematic model, and on any skin equipped with Inertial Measurement Units (IMUs). To validate the proposed method, we first conduct extensive experimentation in simulation and demonstrate a sub-cm positional error from ground truth data --an improvement of six times with respect to prior work; subsequently, we then perform a real-world evaluation on a seven degrees-of-freedom collaborative platform. For this purpose, we additionally introduce a novel design for a stand-alone artificial skin equipped with an IMU for use with the proposed algorithm and a proximity sensor for sensing distance to nearby objects. In conclusion, in this work, we demonstrate seamless integration between a novel hardware design, an accurate calibration method, and preliminary work on applications: the high positional accuracy effectively enables to locate distributed proximity data and allows for a distributed avoidance controller to safely avoid obstacles and people without the need of additional sensing.