 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Contained Kinematic Calibration of a Novel Whole-Body Artificial Skin for Human-Robot Collaboration
Paper and Code
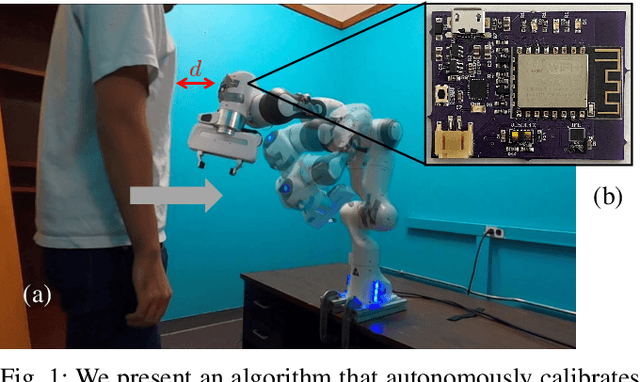
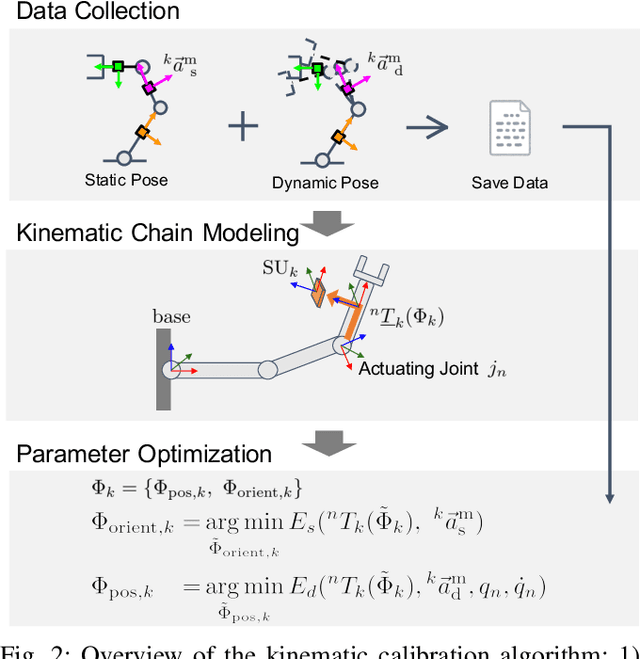
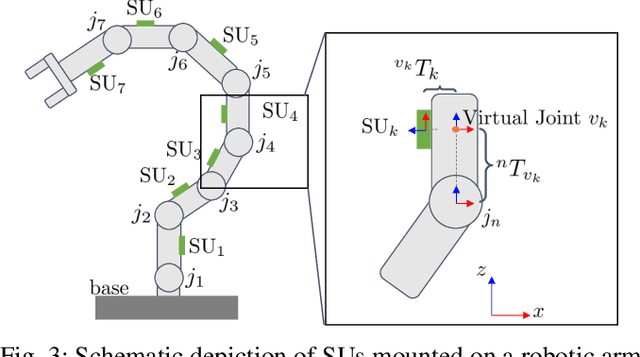
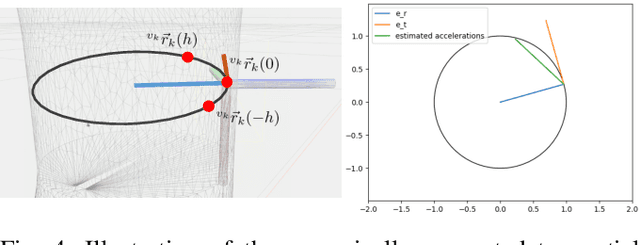
In this paper, we present an accelerometer-based kinematic calibration algorithm to accurately estimate the pose of multiple sensor units distributed along a robot body. Our approach is self-contained, can be used on any robot provided with a Denavit-Hartenberg kinematic model, and on any skin equipped with Inertial Measurement Units (IMUs). To validate the proposed method, we first conduct extensive experimentation in simulation and demonstrate a sub-cm positional error from ground truth data --an improvement of six times with respect to prior work; subsequently, we then perform a real-world evaluation on a seven degrees-of-freedom collaborative platform. For this purpose, we additionally introduce a novel design for a stand-alone artificial skin equipped with an IMU for use with the proposed algorithm and a proximity sensor for sensing distance to nearby objects. In conclusion, in this work, we demonstrate seamless integration between a novel hardware design, an accurate calibration method, and preliminary work on applications: the high positional accuracy effectively enables to locate distributed proximity data and allows for a distributed avoidance controller to safely avoid obstacles and people without the need of additional sensing.