 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward smart composites: small-scale, untethered prediction and control for soft sensor/actuator systems
May 22, 2022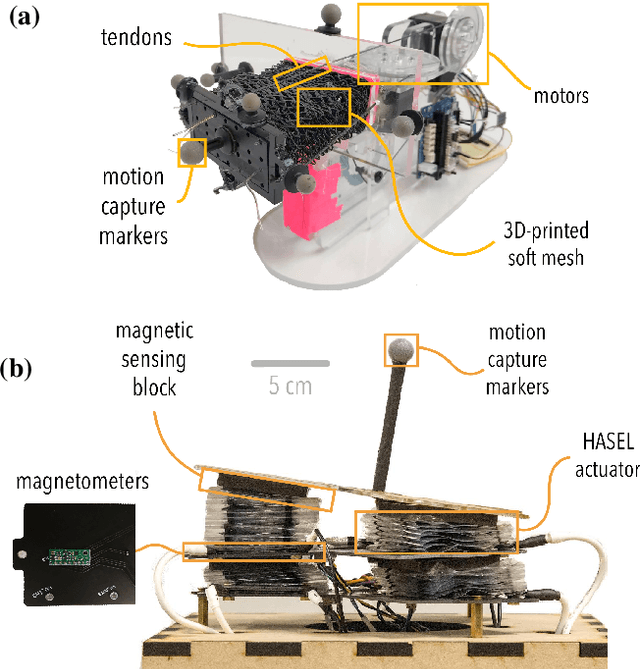
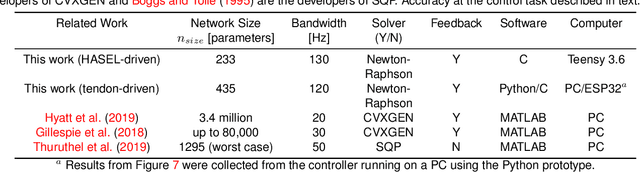
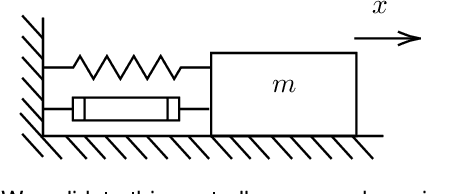
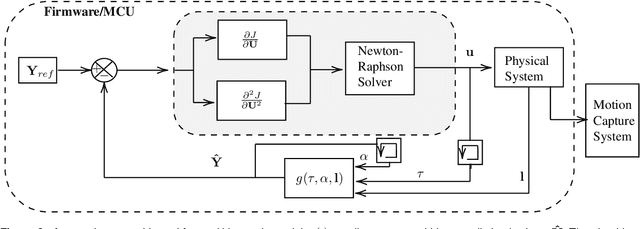
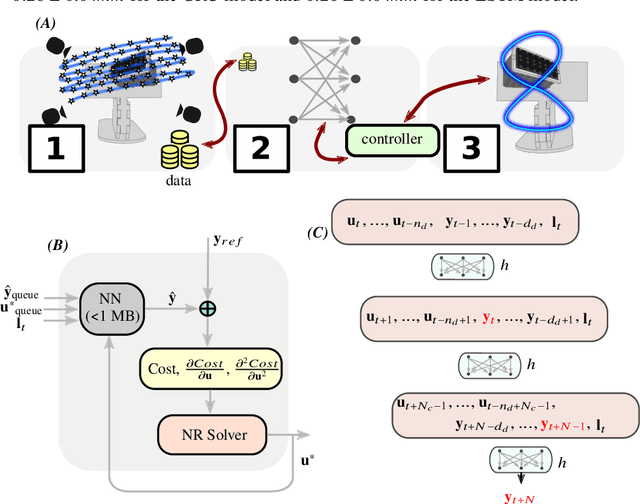
We present a suite of algorithms and tools for model-predictive control of sensor/actuator systems with embedded microcontroller units (MCU). These MCUs can be colocated with sensors and actuators, thereby enabling a new class of smart composites capable of autonomous behavior that does not require an external computer. In this approach, kinematics are learned using a neural network model from offline data and compiled into MCU code using nn4mc, an open-source tool. Online Newton-Raphson optimization solves for the control input. Shallow neural network models applied to 1D sensor signals allow for reduced model sizes and increased control loop frequencies. We validate this approach on a simulated mass-spring-damper system and two experimental setups with different sensing, actuation, and computational hardware: a tendon-based platform with embedded optical lace sensors and a HASEL-based platform with magnetic sensors. Experimental results indicate effective high-bandwidth tracking of reference paths (120 Hz and higher) with a small memory footprint (less than or equal to 6.4% of available flash). The measured path following error does not exceed 2 mm in the tendon-based platform, and the predicted path following error does not exceed 1 mm in the HASEL-based platform. This controller code's mean power consumption in an ARM Cortex-M4 computer is 45.4 mW. This control approach is also compatible with Tensorflow Lite models and equivalent compilers. Embedded intelligence in composite materials enables a new class of composites that infuse intelligence into structures and systems, making them capable of responding to environmental stimuli using their proprioception.
High-bandwidth nonlinear control for soft actuators with recursive network models
Jan 04, 2021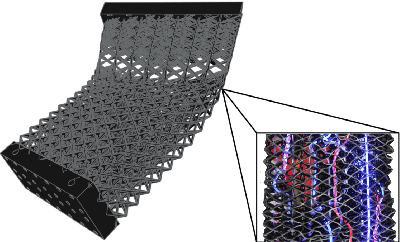
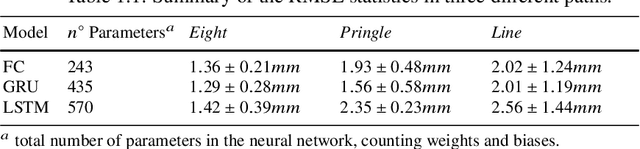
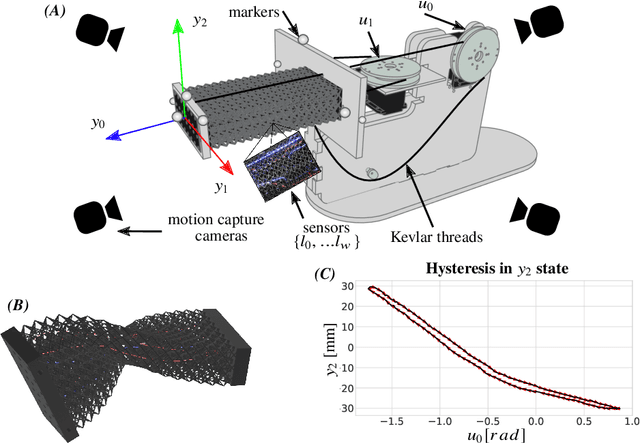
We present a high-bandwidth, lightweight, and nonlinear output tracking technique for soft actuators that combines parsimonious recursive layers for forward output predictions and online optimization using Newton-Raphson. This technique allows for reduced model sizes and increased control loop frequencies when compared with conventional RNN models. Experimental results of this controller prototype on a single soft actuator with soft positional sensors indicate effective tracking of referenced spatial trajectories and rejection of mechanical and electromagnetic disturbances. These are evidenced by root mean squared path tracking errors (RMSE) of 1.8mm using a fully connected (FC) substructure, 1.62mm using a gated recurrent unit (GRU) and 2.11mm using a long short term memory (LSTM) unit, all averaged over three tasks. Among these models, the highest flash memory requirement is 2.22kB enabling co-location of controller and actuator.
Miniaturized Circuitry for Capacitive Self-sensing and Closed-loop Control of Soft Electrostatic Transducers
Sep 15, 2020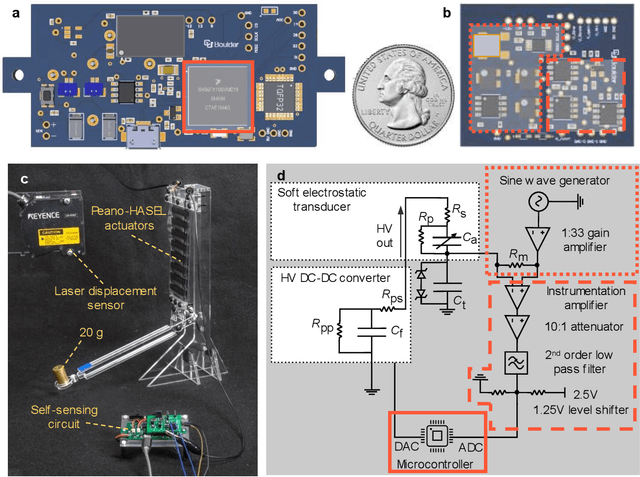
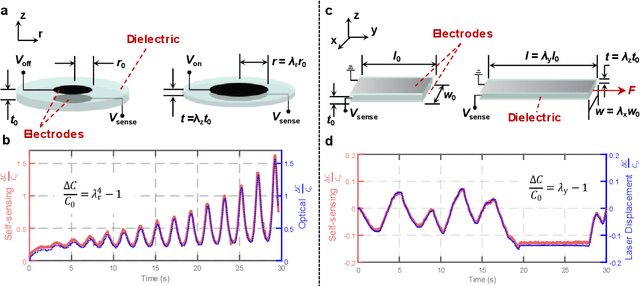
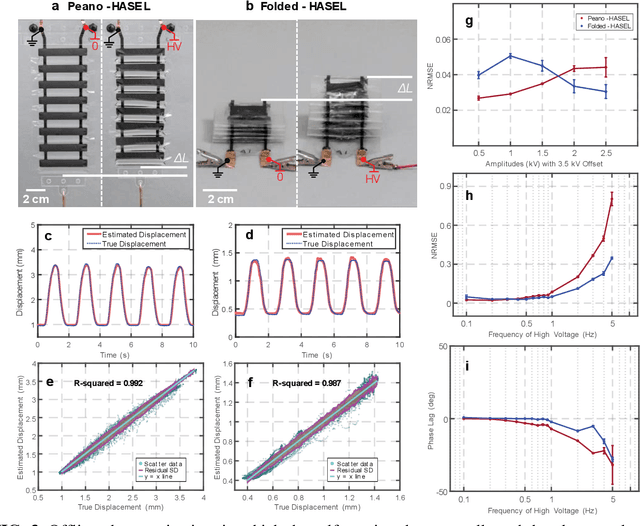

Soft robotics is a field of robotic system design characterized by materials and structures that exhibit large-scale deformation, high compliance, and rich multifunctionality. The incorporation of soft and deformable structures endows soft robotic systems with the compliance and resiliency that makes them well-adapted for unstructured and dynamic environments. While actuation mechanisms for soft robots vary widely, soft electrostatic transducers such as dielectric elastomer actuators (DEAs) and hydraulically amplified self-healing electrostatic (HASEL) actuators have demonstrated promise due to their muscle-like performance and capacitive self-sensing capabilities. Despite previous efforts to implement self-sensing in electrostatic transducers by overlaying sinusoidal low-voltage signals, these designs still require sensing high-voltage signals, requiring bulky components that prevent integration with miniature, untethered soft robots. We present a circuit design that eliminates the need for any high-voltage sensing components, thereby facilitating the design of simple, low cost circuits using off-the-shelf components. Using this circuit, we perform simultaneous sensing and actuation for a range of electrostatic transducers including circular DEAs and HASEL actuators and demonstrate accurate estimated displacements with errors under 4%. We further develop this circuit into a compact and portable system that couples HV actuation, sensing, and computation as a prototype towards untethered, multifunctional soft robotic systems. Finally, we demonstrate the capabilities of our self-sensing design through feedback-control of a robotic arm powered by Peano-HASEL actuators.