 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRate and Power Adaptation for Multihop Regenerative Relaying Systems
Jul 06, 2021
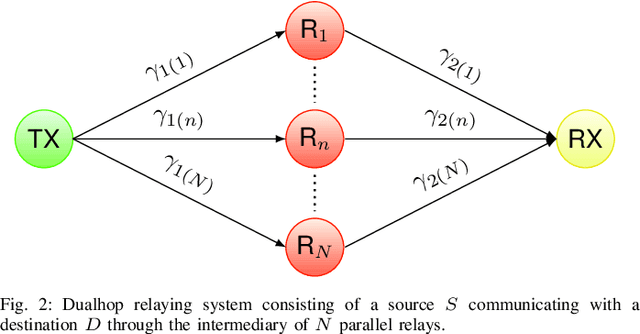
In this work, we provide a global framework analysis of a multi-hop relaying systems wherein the transmitter (TX) communicates with the receiver (RX) through a set of intermediary relays deployed either in series or in parallel. Regenerative based relaying scheme is assumed such as the repetition-coded decoded-and-forward (DF) wherein the decoding is threshold-based. To reflect a wide range of fading, we introduce the generalized $H$-function (also termed as Fox-$H$ function) distribution model which enables the modeling of radio-frequency (RF) fading like Weibull and Gamma, as well as the free-space optic (FSO) such as the Double Generalized Gamma and M\'alaga fading. In this context, we introduce various power and rate adaptation policies based on the channel state information (CSI) availability at TX and RX. Finally, we address the effects of relaying topology, number of relays and fading model, etc, on the performance reliability of each link adaptation policy.
Miniaturized Circuitry for Capacitive Self-sensing and Closed-loop Control of Soft Electrostatic Transducers
Sep 15, 2020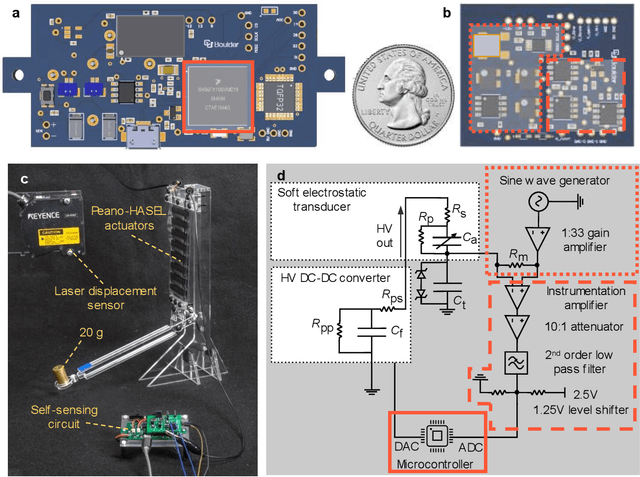
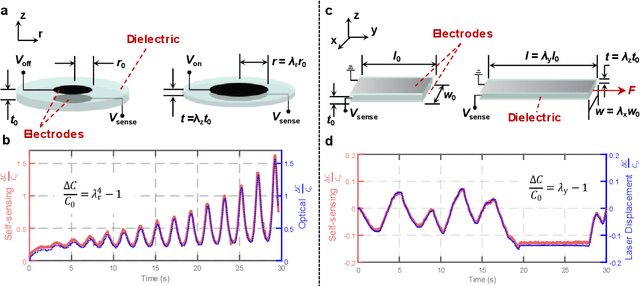
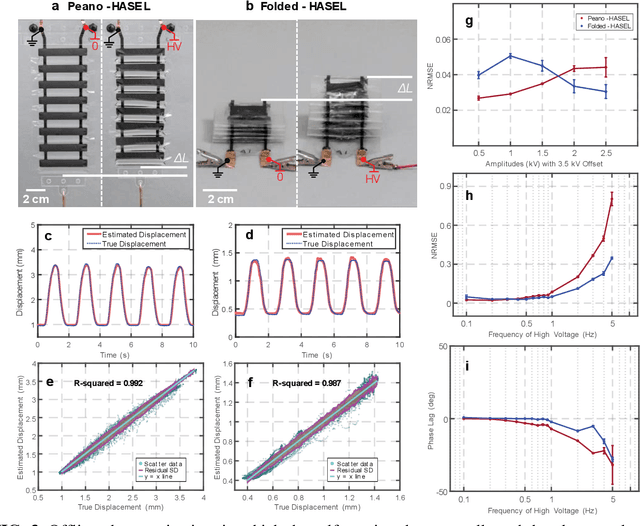

Soft robotics is a field of robotic system design characterized by materials and structures that exhibit large-scale deformation, high compliance, and rich multifunctionality. The incorporation of soft and deformable structures endows soft robotic systems with the compliance and resiliency that makes them well-adapted for unstructured and dynamic environments. While actuation mechanisms for soft robots vary widely, soft electrostatic transducers such as dielectric elastomer actuators (DEAs) and hydraulically amplified self-healing electrostatic (HASEL) actuators have demonstrated promise due to their muscle-like performance and capacitive self-sensing capabilities. Despite previous efforts to implement self-sensing in electrostatic transducers by overlaying sinusoidal low-voltage signals, these designs still require sensing high-voltage signals, requiring bulky components that prevent integration with miniature, untethered soft robots. We present a circuit design that eliminates the need for any high-voltage sensing components, thereby facilitating the design of simple, low cost circuits using off-the-shelf components. Using this circuit, we perform simultaneous sensing and actuation for a range of electrostatic transducers including circular DEAs and HASEL actuators and demonstrate accurate estimated displacements with errors under 4%. We further develop this circuit into a compact and portable system that couples HV actuation, sensing, and computation as a prototype towards untethered, multifunctional soft robotic systems. Finally, we demonstrate the capabilities of our self-sensing design through feedback-control of a robotic arm powered by Peano-HASEL actuators.