 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoftware Engineering for Robotics: Future Research Directions; Report from the 2023 Workshop on Software Engineering for Robotics
Jan 22, 2024Robots are experiencing a revolution as they permeate many aspects of our daily lives, from performing house maintenance to infrastructure inspection, from efficiently warehousing goods to autonomous vehicles, and more. This technical progress and its impact are astounding. This revolution, however, is outstripping the capabilities of existing software development processes, techniques, and tools, which largely have remained unchanged for decades. These capabilities are ill-suited to handling the challenges unique to robotics software such as dealing with a wide diversity of domains, heterogeneous hardware, programmed and learned components, complex physical environments captured and modeled with uncertainty, emergent behaviors that include human interactions, and scalability demands that span across multiple dimensions. Looking ahead to the need to develop software for robots that are ever more ubiquitous, autonomous, and reliant on complex adaptive components, hardware, and data, motivated an NSF-sponsored community workshop on the subject of Software Engineering for Robotics, held in Detroit, Michigan in October 2023. The goal of the workshop was to bring together thought leaders across robotics and software engineering to coalesce a community, and identify key problems in the area of SE for robotics that that community should aim to solve over the next 5 years. This report serves to summarize the motivation, activities, and findings of that workshop, in particular by articulating the challenges unique to robot software, and identifying a vision for fruitful near-term research directions to tackle them.
The Open Vision Computer: An Integrated Sensing and Compute System for Mobile Robots
Sep 20, 2018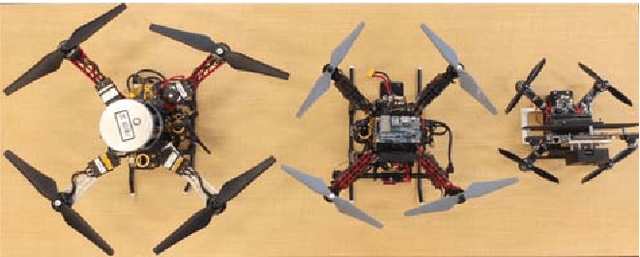
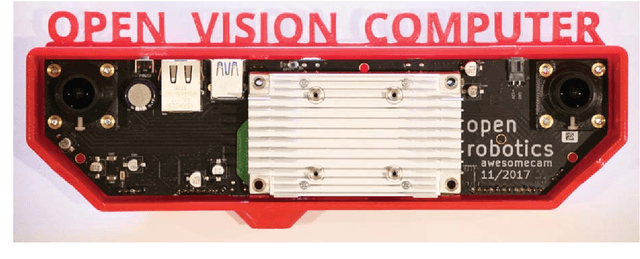
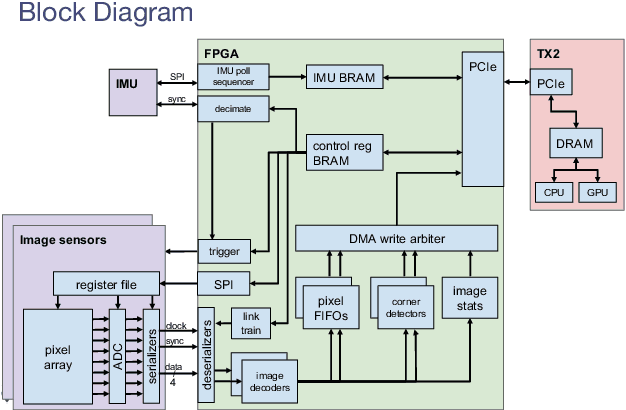
In this paper we describe the Open Vision Computer (OVC) which was designed to support high speed, vision guided autonomous drone flight. In particular our aim was to develop a system that would be suitable for relatively small-scale flying platforms where size, weight, power consumption and computational performance were all important considerations. This manuscript describes the primary features of our OVC system and explains how they are used to support fully autonomous indoor and outdoor exploration and navigation operations on our Falcon 250 quadrotor platform.