 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSROS2: Usable Cyber Security Tools for ROS 2
Aug 04, 2022

ROS 2 is rapidly becoming a standard in the robotics industry. Built upon DDS as its default communication middleware and used in safety-critical scenarios, adding security to robots and ROS computational graphs is increasingly becoming a concern. The present work introduces SROS2, a series of developer tools and libraries that facilitate adding security to ROS 2 graphs. Focusing on a usability-centric approach in SROS2, we present a methodology for securing graphs systematically while following the DevSecOps model. We also demonstrate the use of our security tools by presenting an application case study that considers securing a graph using the popular Navigation2 and SLAM Toolbox stacks applied in a TurtleBot3 robot. We analyse the current capabilities of SROS2 and discuss the shortcomings, which provides insights for future contributions and extensions. Ultimately, we present SROS2 as usable security tools for ROS 2 and argue that without usability, security in robotics will be greatly impaired.
The Open Vision Computer: An Integrated Sensing and Compute System for Mobile Robots
Sep 20, 2018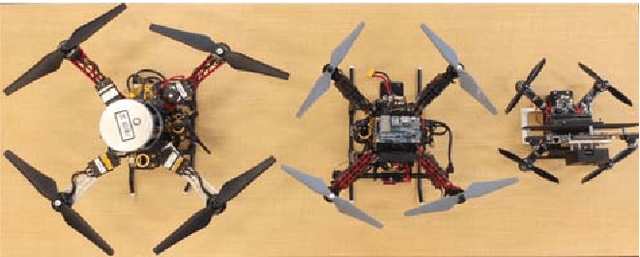
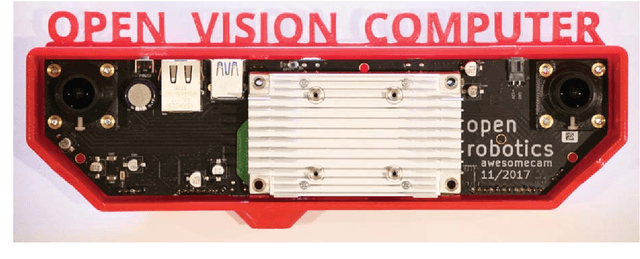
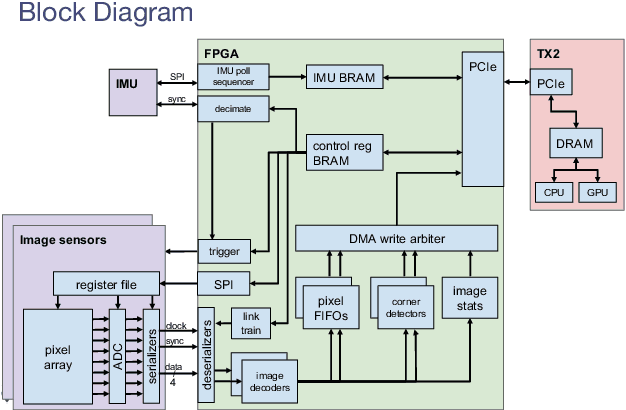
In this paper we describe the Open Vision Computer (OVC) which was designed to support high speed, vision guided autonomous drone flight. In particular our aim was to develop a system that would be suitable for relatively small-scale flying platforms where size, weight, power consumption and computational performance were all important considerations. This manuscript describes the primary features of our OVC system and explains how they are used to support fully autonomous indoor and outdoor exploration and navigation operations on our Falcon 250 quadrotor platform.