 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Multi-MAV Localization with Anonymous Relative Measurements Using Coupled Probabilistic Data Association Filter
Sep 18, 2019


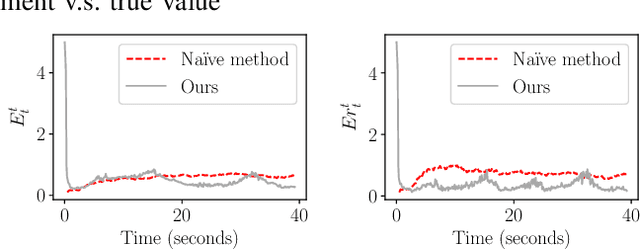
We address the localization of robots in a multi-MAV system where external infrastructure like GPS or motion capture system may not be available. We introduce a vision plus IMU system for localization that uses relative distance and bearing measurements. Our approach lends itself to implementation on platforms with several constraints on size, weight, and payload (SWaP). Particularly, our framework fuses the odometry with anonymous, visual-based robot-to-robot detection to estimate all robot poses in one common frame, addressing three main challenges: 1) initial configuration of the robot team is unknown, 2) data association between detection and robot targets is unknown, and 3) vision-based detection yields false negatives, false positives, inaccurate, noisy bearing and distance measurements of other robots. Our approach extends the Coupled Probabilistic Data Association Filter (CPDAF) to cope with nonlinear measurements. We demonstrate the superior performance of our approach over a simple VIO-based method in a simulation using measurement models obtained from real data. We also show how on-board sensing, estimation and control can be used for formation flight.
Towards Search-based Motion Planning for Micro Aerial Vehicles
Oct 07, 2018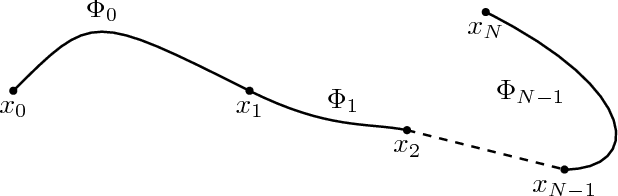
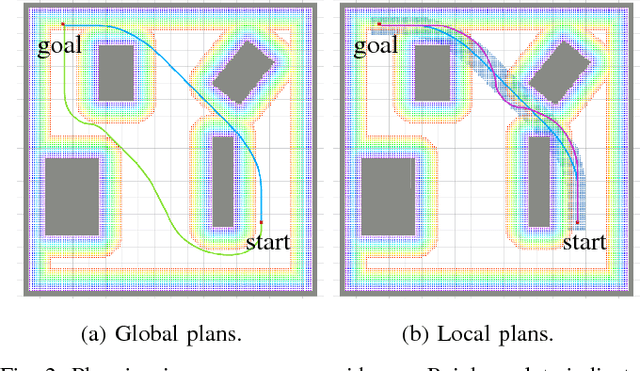


Search-based motion planning has been used for mobile robots in many applications. However, it has not been fully developed and applied for planning full state trajectories of Micro Aerial Vehicles (MAVs) due to their complicated dynamics and the requirement of real-time computation. In this paper, we explore a search-based motion planning framework that plans dynamically feasible, collision-free, and resolution optimal and complete trajectories. This paper extends the search-based planning approach to address three important scenarios for MAVs navigation: (i) planning safe trajectories in the presence of motion uncertainty; (ii) planning with constraints on field-of-view and (iii) planning in dynamic environments. We show that these problems can be solved effectively and efficiently using the proposed search-based planning with motion primitives.
Real Time Dense Depth Estimation by Fusing Stereo with Sparse Depth Measurements
Sep 20, 2018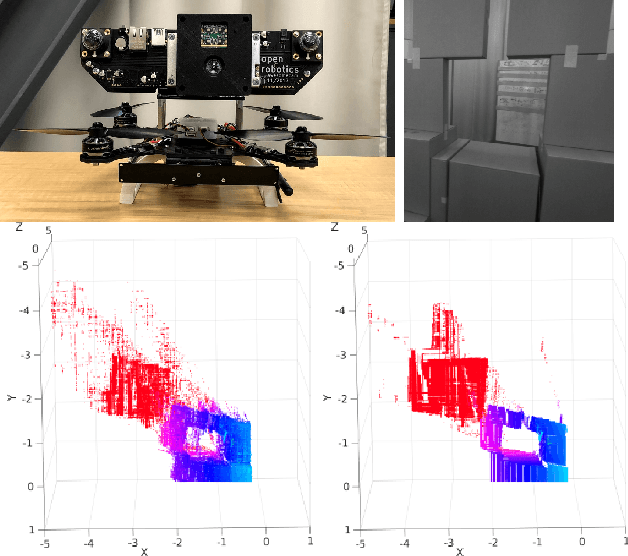
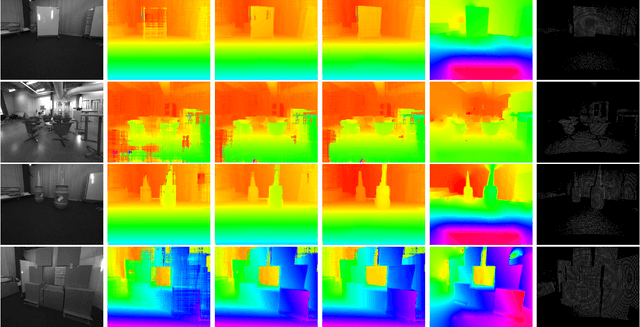
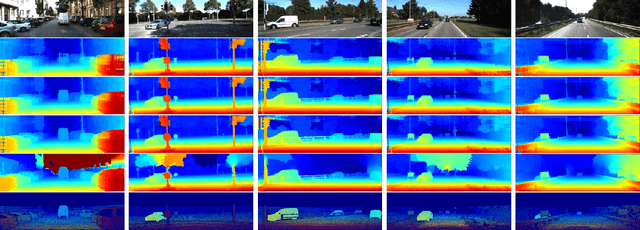
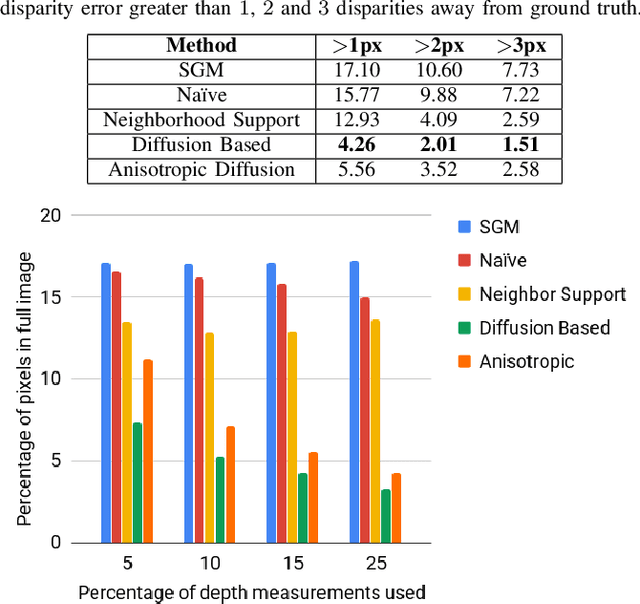
We present an approach to depth estimation that fuses information from a stereo pair with sparse range measurements derived from a LIDAR sensor or a range camera. The goal of this work is to exploit the complementary strengths of the two sensor modalities, the accurate but sparse range measurements and the ambiguous but dense stereo information. These two sources are effectively and efficiently fused by combining ideas from anisotropic diffusion and semi-global matching. We evaluate our approach on the KITTI 2015 and Middlebury 2014 datasets, using randomly sampled ground truth range measurements as our sparse depth input. We achieve significant performance improvements with a small fraction of range measurements on both datasets. We also provide qualitative results from our platform using the PMDTec Monstar sensor. Our entire pipeline runs on an NVIDIA TX-2 platform at 5Hz on 1280x1024 stereo images with 128 disparity levels.
The Open Vision Computer: An Integrated Sensing and Compute System for Mobile Robots
Sep 20, 2018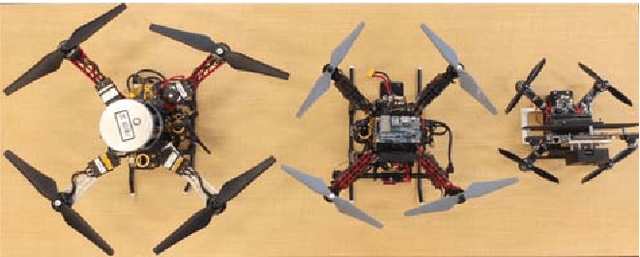
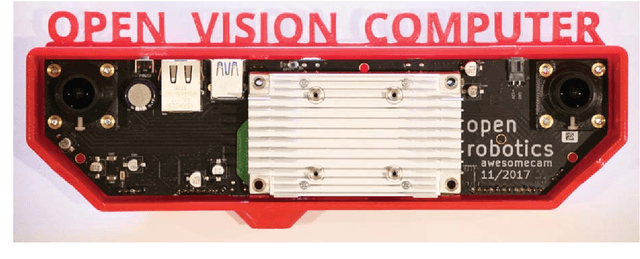
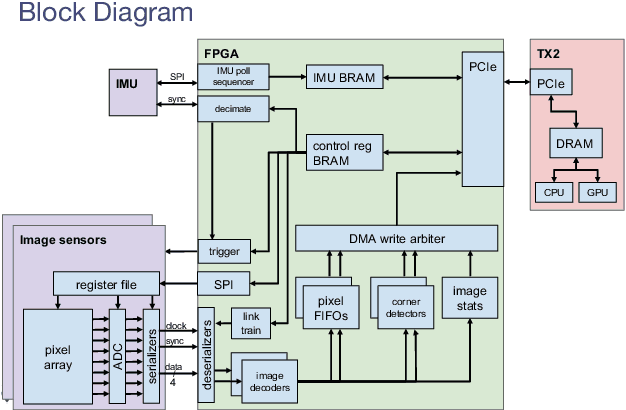
In this paper we describe the Open Vision Computer (OVC) which was designed to support high speed, vision guided autonomous drone flight. In particular our aim was to develop a system that would be suitable for relatively small-scale flying platforms where size, weight, power consumption and computational performance were all important considerations. This manuscript describes the primary features of our OVC system and explains how they are used to support fully autonomous indoor and outdoor exploration and navigation operations on our Falcon 250 quadrotor platform.
Experiments in Fast, Autonomous, GPS-Denied Quadrotor Flight
Jun 19, 2018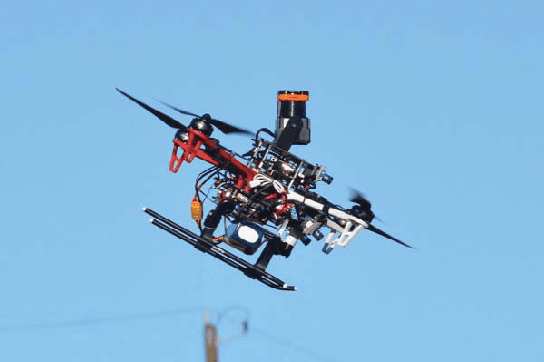
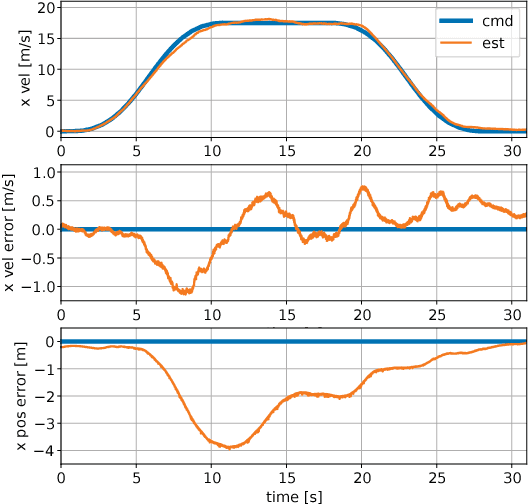
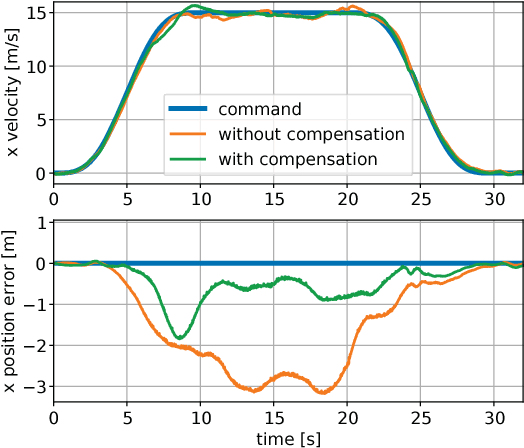
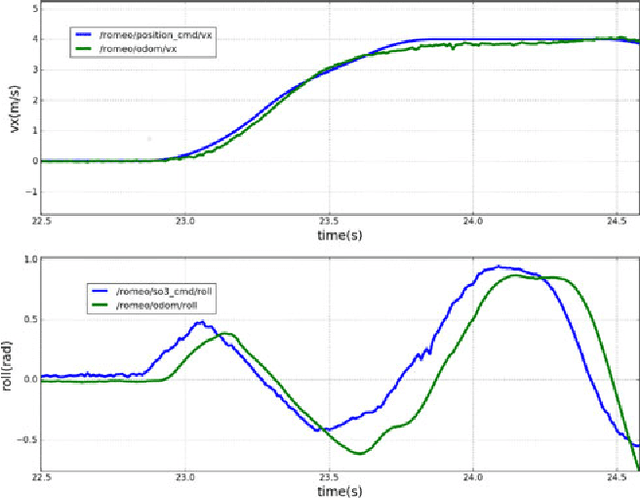
High speed navigation through unknown environments is a challenging problem in robotics. It requires fast computation and tight integration of all the subsystems on the robot such that the latency in the perception-action loop is as small as possible. Aerial robots add a limitation of payload capacity, which restricts the amount of computation that can be carried onboard. This requires efficient algorithms for each component in the navigation system. In this paper, we describe our quadrotor system which is able to smoothly navigate through mixed indoor and outdoor environments and is able to fly at speeds of more than 18 m/s. We provide an overview of our system and details about the specific component technologies that enable the high speed navigation capability of our platform. We demonstrate the robustness of our system through high speed autonomous flights and navigation through a variety of obstacle rich environments.
Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight
Jan 10, 2018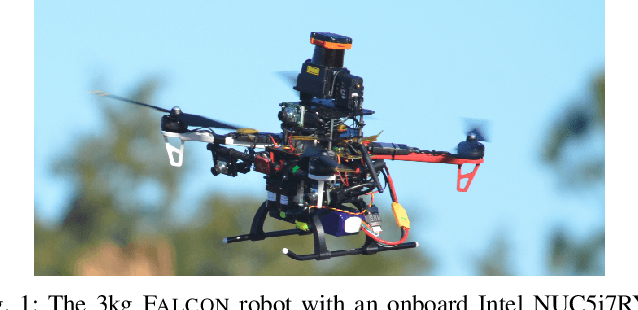
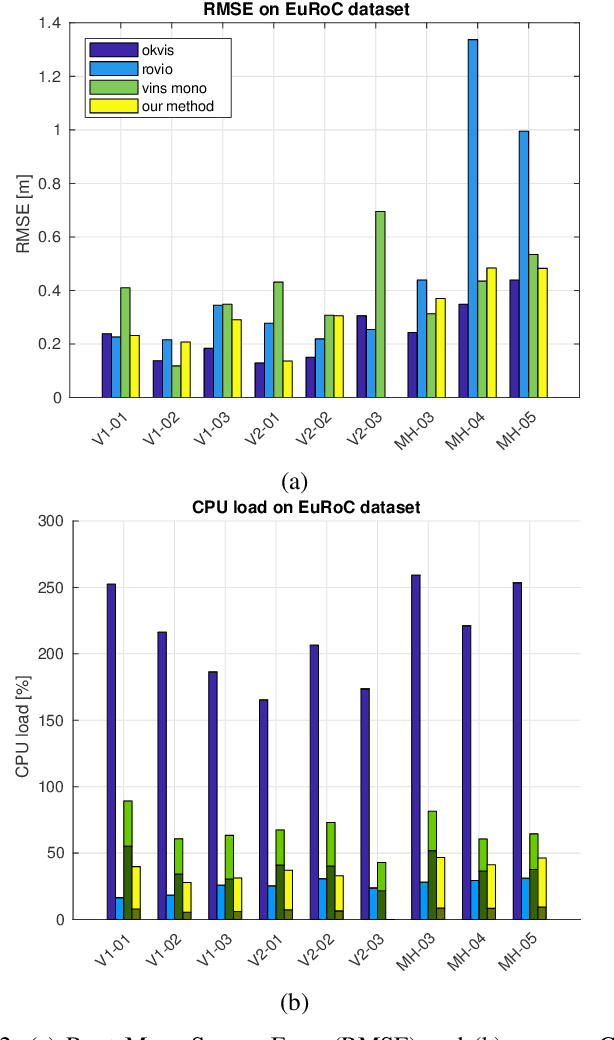
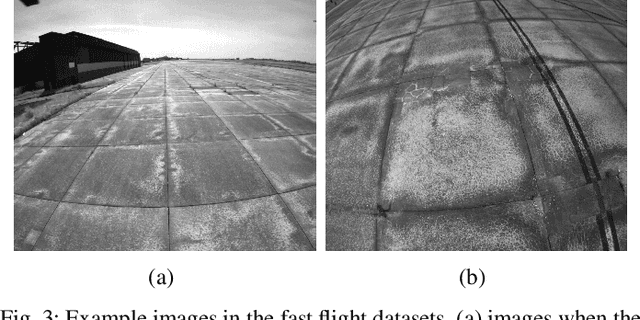
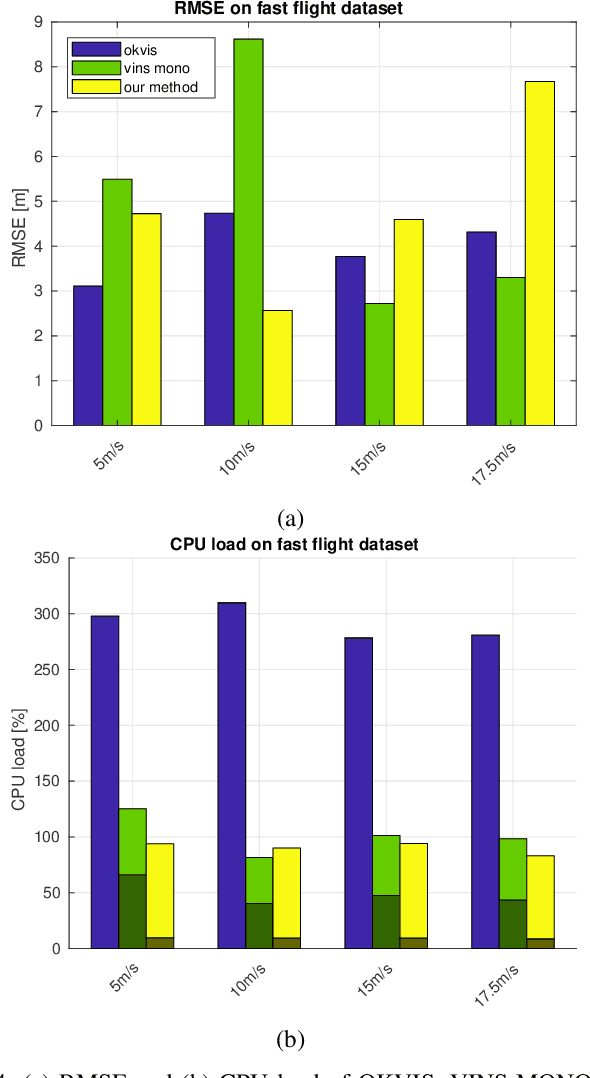
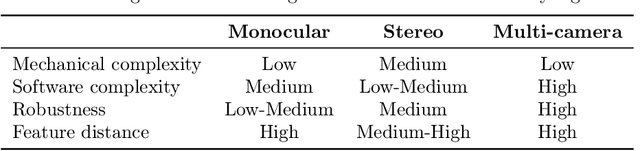
In recent years, vision-aided inertial odometry for state estimation has matured significantly. However, we still encounter challenges in terms of improving the computational efficiency and robustness of the underlying algorithms for applications in autonomous flight with micro aerial vehicles in which it is difficult to use high quality sensors and pow- erful processors because of constraints on size and weight. In this paper, we present a filter-based stereo visual inertial odometry that uses the Multi-State Constraint Kalman Filter (MSCKF) [1]. Previous work on stereo visual inertial odometry has resulted in solutions that are computationally expensive. We demonstrate that our Stereo Multi-State Constraint Kalman Filter (S-MSCKF) is comparable to state-of-art monocular solutions in terms of computational cost, while providing signifi- cantly greater robustness. We evaluate our S-MSCKF algorithm and compare it with state-of-art methods including OKVIS, ROVIO, and VINS-MONO on both the EuRoC dataset, and our own experimental datasets demonstrating fast autonomous flight with maximum speed of 17.5m/s in indoor and outdoor environments. Our implementation of the S-MSCKF is available at https://github.com/KumarRobotics/msckf_vio.
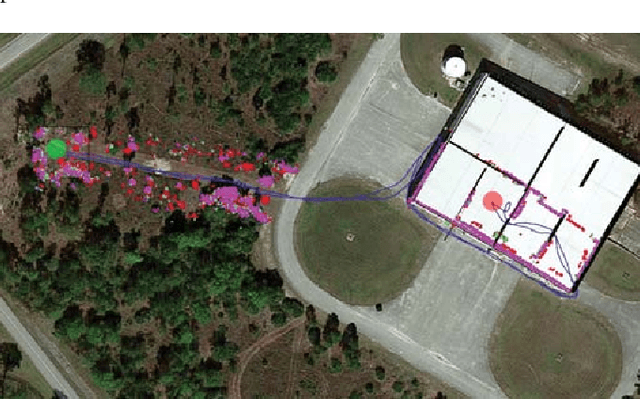
Fast, Autonomous Flight in GPS-Denied and Cluttered Environments
Dec 06, 2017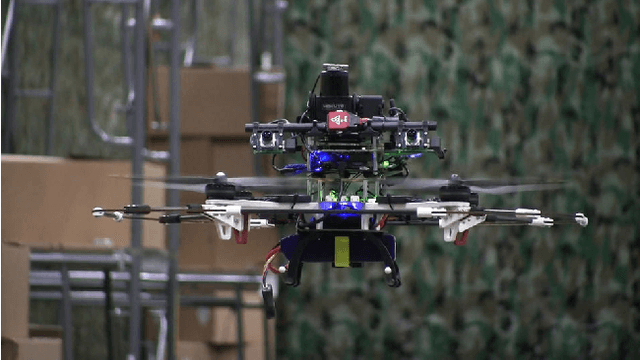
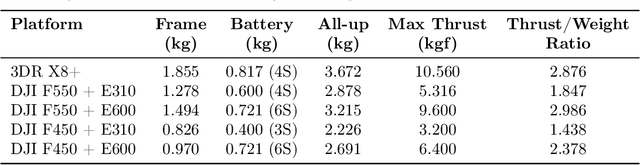
One of the most challenging tasks for a flying robot is to autonomously navigate between target locations quickly and reliably while avoiding obstacles in its path, and with little to no a-priori knowledge of the operating environment. This challenge is addressed in the present paper. We describe the system design and software architecture of our proposed solution, and showcase how all the distinct components can be integrated to enable smooth robot operation. We provide critical insight on hardware and software component selection and development, and present results from extensive experimental testing in real-world warehouse environments. Experimental testing reveals that our proposed solution can deliver fast and robust aerial robot autonomous navigation in cluttered, GPS-denied environments.
Search-based Motion Planning for Aggressive Flight in SE(3)
Oct 07, 2017


Quadrotors with large thrust-to-weight ratios are able to track aggressive trajectories with sharp turns and high accelerations. In this work, we develop a search-based trajectory planning approach that exploits the quadrotor maneuverability to generate sequences of motion primitives in cluttered environments. We model the quadrotor body as an ellipsoid and compute its flight attitude along trajectories in order to check for collisions against obstacles. The ellipsoid model allows the quadrotor to pass through gaps that are smaller than its diameter with non-zero pitch or roll angles. Without any prior information about the location of gaps and associated attitude constraints, our algorithm is able to find a safe and optimal trajectory that guides the robot to its goal as fast as possible. To accelerate planning, we first perform a lower dimensional search and use it as a heuristic to guide the generation of a final dynamically feasible trajectory. We analyze critical discretization parameters of motion primitive planning and demonstrate the feasibility of the generated trajectories in various simulations and real-world experiments.
Search-based Motion Planning for Quadrotors using Linear Quadratic Minimum Time Control
Sep 15, 2017
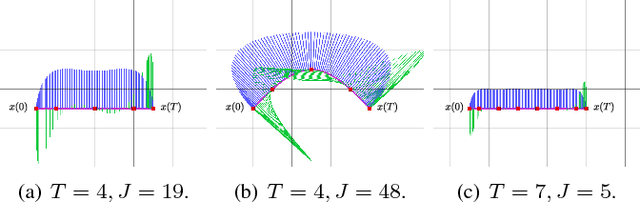
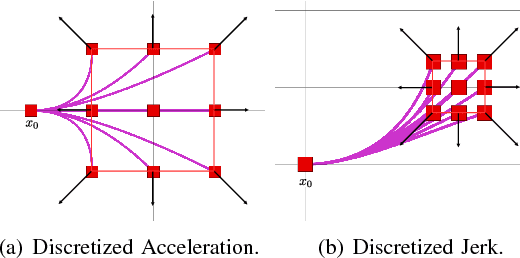
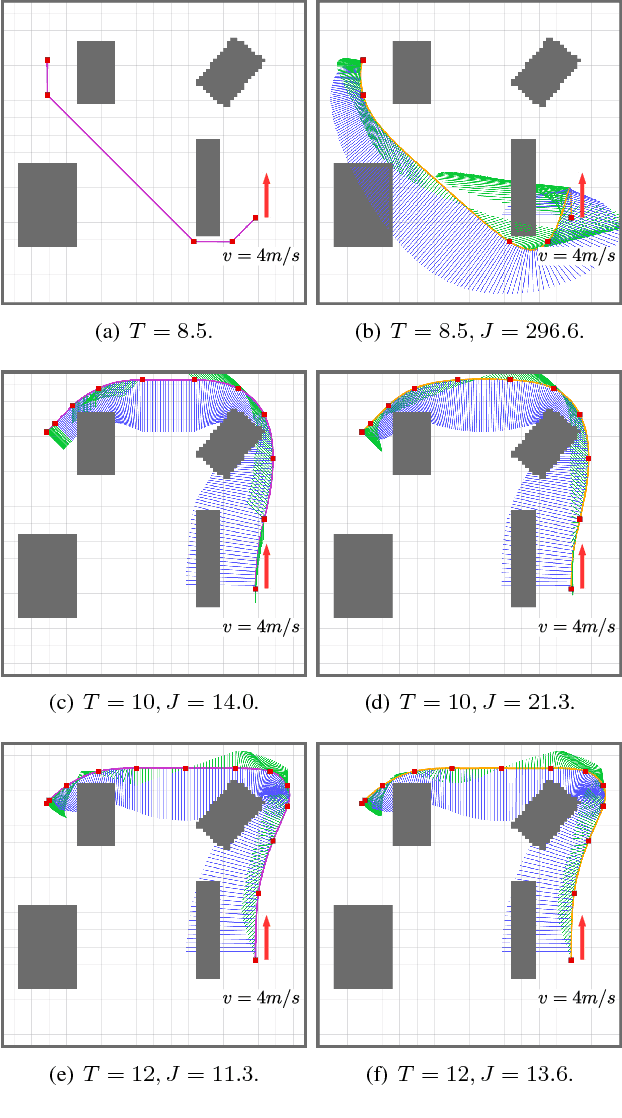
In this work, we propose a search-based planning method to compute dynamically feasible trajectories for a quadrotor flying in an obstacle-cluttered environment. Our approach searches for smooth, minimum-time trajectories by exploring the map using a set of short-duration motion primitives. The primitives are generated by solving an optimal control problem and induce a finite lattice discretization on the state space which can be explored using a graph-search algorithm. The proposed approach is able to generate resolution-complete (i.e., optimal in the discretized space), safe, dynamically feasibility trajectories efficiently by exploiting the explicit solution of a Linear Quadratic Minimum Time problem. It does not assume a hovering initial condition and, hence, is suitable for fast online re-planning while the robot is moving. Quadrotor navigation with online re-planning is demonstrated using the proposed approach in simulation and physical experiments and comparisons with trajectory generation based on state-of-art quadratic programming are presented.