 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Consensus via Voronoi Communication Graphs
Sep 20, 2022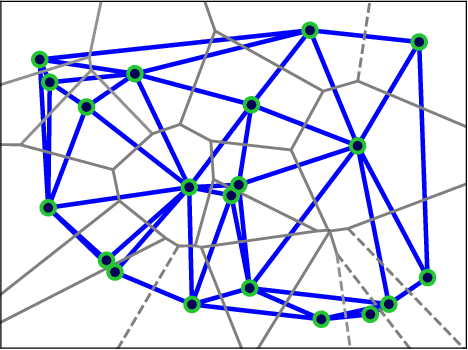
Consensus algorithms form the foundation for many distributed algorithms by enabling multiple robots to converge to consistent estimates of global variables using only local communication. However, standard consensus protocols can be easily led astray by non-cooperative team members. As such, the study of resilient forms of consensus is necessary for designing resilient distributed algorithms. W-MSR consensus is one such resilient consensus algorithm that allows for resilient consensus with only local knowledge of the communication graph and no a priori model for the data being shared. However, the verification that a given communication graph meets the strict graph connectivity requirement makes W-MSR difficult to use in practice. In this paper, we show that a commonly used communication graph structure in robotics literature, the communication graph built based on the Voronoi tessellation, automatically results in a sufficiently connected graph to reject a single non-cooperative team member. Further, we show how this graph can be enhanced to reject two non-cooperative team members and provide a roadmap for modifications for further resilience. This contribution will allow for the easy application of resilient consensus to algorithms that already rely on Voronoi-based communication such as distributed coverage and exploration algorithms.
Dense 3-D Mapping with Spatial Correlation via Gaussian Filtering
Jan 23, 2018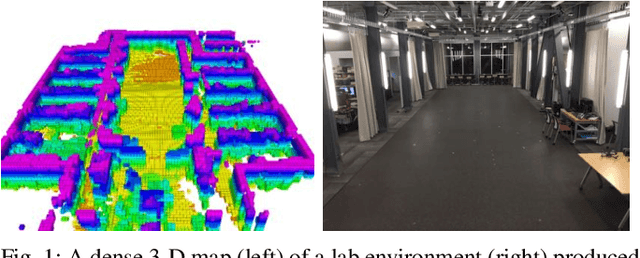
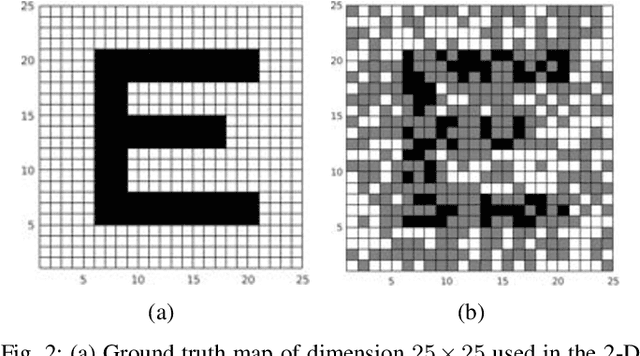
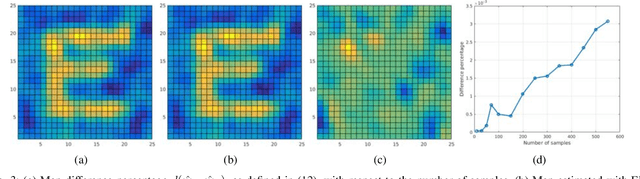
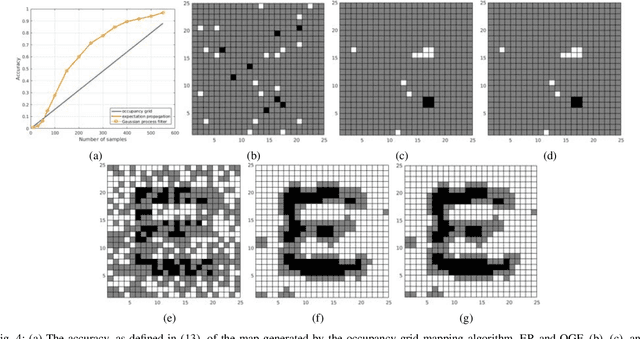
Constructing an occupancy representation of the environment is a fundamental problem for robot autonomy. Many accurate and efficient methods exist that address this problem but most assume that the occupancy states of different elements in the map representation are statistically independent. The focus of this paper is to provide a model that captures correlation of the occupancy of map elements. Correlation is important not only for improved accuracy but also for quantifying uncertainty in the map and for planning autonomous mapping trajectories based on the correlation among known and unknown areas. Recent work proposes Gaussian Process (GP) regression to capture covariance information and enable resolution-free occupancy estimation. The drawback of techniques based on GP regression (or classification) is that the computation complexity scales cubically with the length of the measurement history. Our main contribution is a new approach for occupancy mapping that models the binary nature of occupancy measurements precisely, via a Bernoulli distribution, and provides an efficient approximation of GP classification with complexity that does not scale with time. We prove that the error between the estimates provided by our method and those provided by GP classification is negligible. The proposed method is evaluated using both simulated data and real data collected using a Velodyne Puck 3-D range sensor.
Fast, Autonomous Flight in GPS-Denied and Cluttered Environments
Dec 06, 2017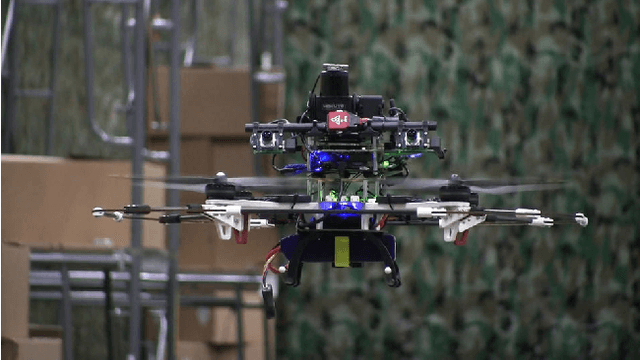
One of the most challenging tasks for a flying robot is to autonomously navigate between target locations quickly and reliably while avoiding obstacles in its path, and with little to no a-priori knowledge of the operating environment. This challenge is addressed in the present paper. We describe the system design and software architecture of our proposed solution, and showcase how all the distinct components can be integrated to enable smooth robot operation. We provide critical insight on hardware and software component selection and development, and present results from extensive experimental testing in real-world warehouse environments. Experimental testing reveals that our proposed solution can deliver fast and robust aerial robot autonomous navigation in cluttered, GPS-denied environments.