 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Accuracy of Vine Robot Shape Sensing with Distributed Inertial Measurement Units
Feb 27, 2026Soft, tip-extending vine robots are well suited for navigating tight, debris-filled environments, making them ideal for urban search and rescue. Sensing the full shape of a vine robot's body is helpful both for localizing information from other sensors placed along the robot body and for determining the robot's configuration within the space being explored. Prior approaches have localized vine robot tips using a single inertial measurement unit (IMU) combined with force sensing or length estimation, while one method demonstrated full-body shape sensing using distributed IMUs on a passively steered robot in controlled maze environments. However, the accuracy of distributed IMU-based shape sensing under active steering, varying robot lengths, and different sensor spacings has not been systematically quantified. In this work, we experimentally evaluate the accuracy of vine robot shape sensing using distributed IMUs along the robot body. We quantify IMU drift, measuring an average orientation drift rate of 1.33 degrees/min across 15 sensors. For passive steering, mean tip position error was 11% of robot length. For active steering, mean tip position error increased to 16%. During growth experiments across lengths from 30-175 cm, mean tip error was 8%, with a positive trend with increasing length. We also analyze the influence of sensor spacing and observe that intermediate spacings can minimize error for single-curvature shapes. These results demonstrate the feasibility of distributed IMU-based shape sensing for vine robots while highlighting key limitations and opportunities for improved modeling and algorithmic integration for field deployment.
Multimodal Optical Imaging Platform for Quantitative Burn Assessment
Nov 19, 2025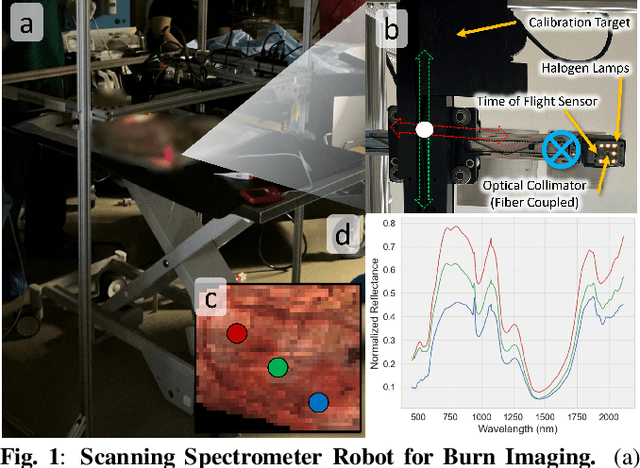
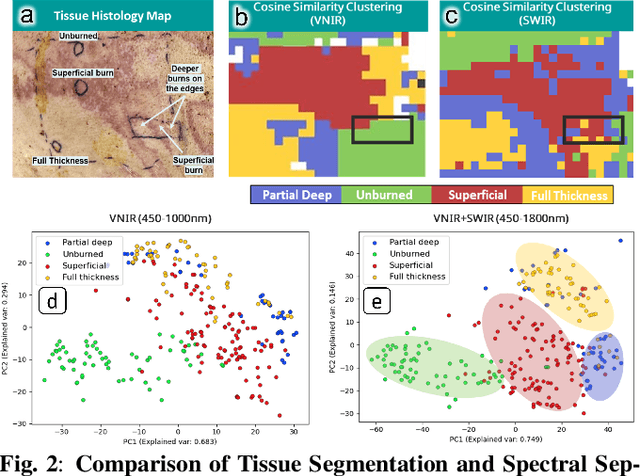
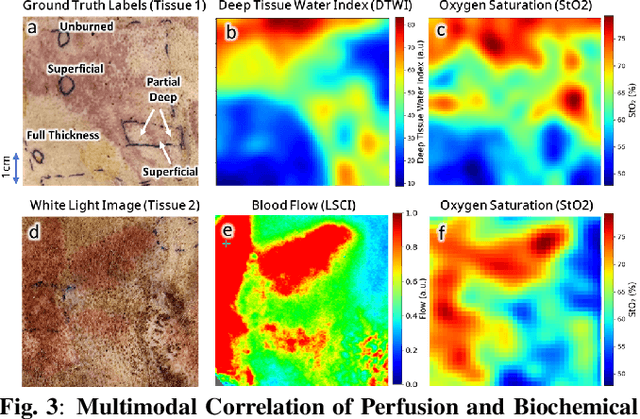
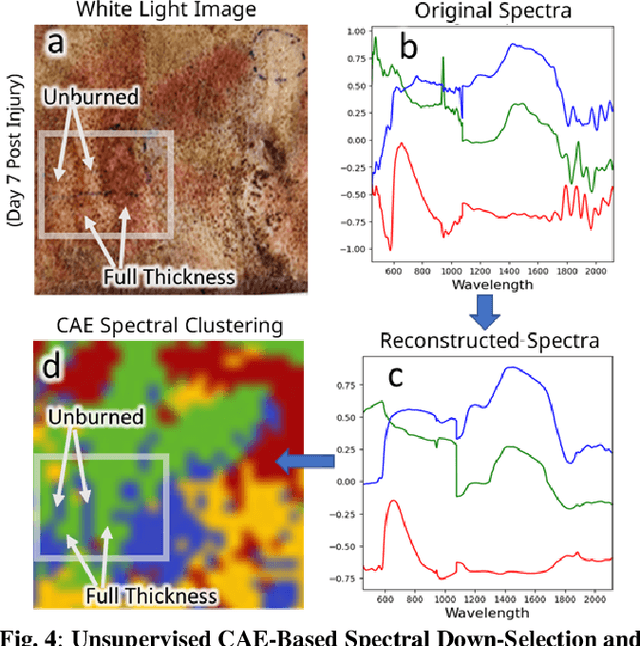
Accurate assessment of burn severity at injury onset remains a major clinical challenge due to the lack of objective methods for detecting subsurface tissue damage. This limitation is critical in battlefield and mass-casualty settings, where rapid and reliable evaluation of burn depth is essential for triage and surgical decision-making. We present a multimodal optical imaging framework that establishes the foundation for a compact, low-size, weight, and power (low-SWaP) field-deployable device for quantitative burn assessment. The system integrates broadband hyperspectral imaging (VSWIR, 400 -- 2100 nm) with laser speckle contrast imaging to jointly evaluate biochemical composition and microvascular perfusion. Using short-wave infrared (SWIR, >1000 nm) wavelengths, we developed and validated novel deep-tissue parameters linked to water, lipid, and collagen absorption features that enhance burn-tissue separability and burn severity classification. We implemented and validated unsupervised learning methods for spectral feature extraction, band down-selection, and clustering against histology, establishing a foundation for a rugged, data-driven device for early quantitative burn evaluation in austere environments.
On Steerability Factors for Growing Vine Robots
Oct 26, 2025Vine robots extend their tubular bodies by everting material from the tip, enabling navigation in complex environments with a minimalist soft body. Despite their promise for field applications, especially in the urban search and rescue domain, performance is constrained by the weight of attached sensors or tools, as well as other design and control choices. This work investigates how tip load, pressure, length, diameter, and fabrication method shape vine robot steerability--the ability to maneuver with controlled curvature--for robots that steer with series pouch motor-style pneumatic actuators. We conduct two groups of experiments: (1) studying tip load, chamber pressure, length, and diameter in a robot supporting itself against gravity, and (2) studying fabrication method and ratio of actuator to chamber pressure in a robot supported on the ground. Results show that steerability decreases with increasing tip load, is best at moderate chamber pressure, increases with length, and is largely unaffected by diameter. Robots with actuators attached on their exterior begin curving at low pressure ratios, but curvature saturates at high pressure ratios; those with actuators integrated into the robot body require higher pressure ratios to begin curving but achieve higher curvature overall. We demonstrate that robots optimized with these principles outperform those with ad hoc parameters in a mobility task that involves maximizing upward and horizontal curvatures.
RubbleSim: A Photorealistic Structural Collapse Simulator for Confined Space Mapping
Oct 23, 2025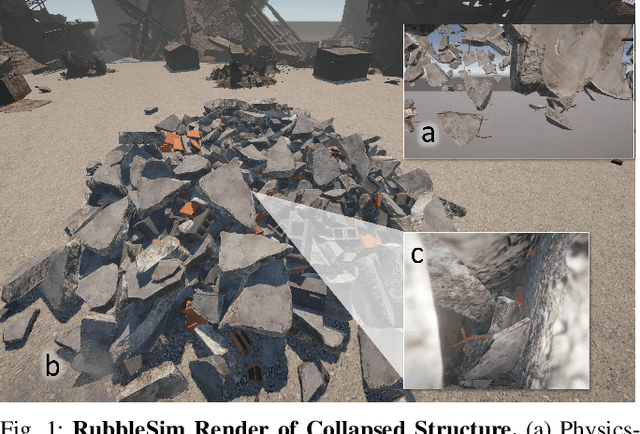
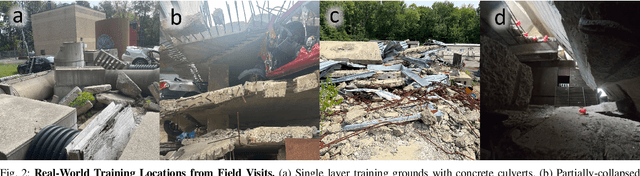
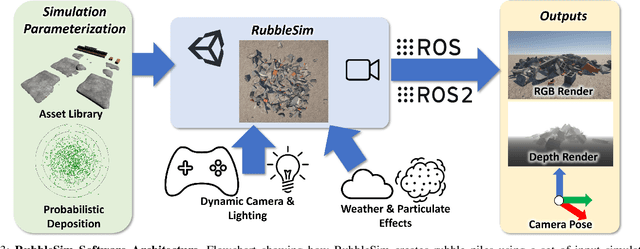
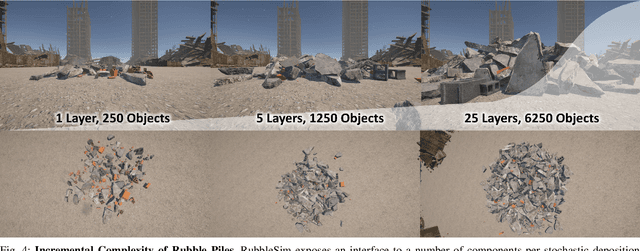
Despite well-reported instances of robots being used in disaster response, there is scant published data on the internal composition of the void spaces within structural collapse incidents. Data collected during these incidents is mired in legal constraints, as ownership is often tied to the responding agencies, with little hope of public release for research. While engineered rubble piles are used for training, these sites are also reluctant to release information about their proprietary training grounds. To overcome this access challenge, we present RubbleSim -- an open-source, reconfigurable simulator for photorealistic void space exploration. The design of the simulation assets is directly informed by visits to numerous training rubble sites at differing levels of complexity. The simulator is implemented in Unity with multi-operating system support. The simulation uses a physics-based approach to build stochastic rubble piles, allowing for rapid iteration between simulation worlds while retaining absolute knowledge of the ground truth. Using RubbleSim, we apply a state-of-the-art structure-from-motion algorithm to illustrate how perception performance degrades under challenging visual conditions inside the emulated void spaces. Pre-built binaries and source code to implement are available online: https://github.com/mit-ll/rubble_pile_simulator.
SCANS: A Soft Gripper with Curvature and Spectroscopy Sensors for In-Hand Material Differentiation
Oct 02, 2025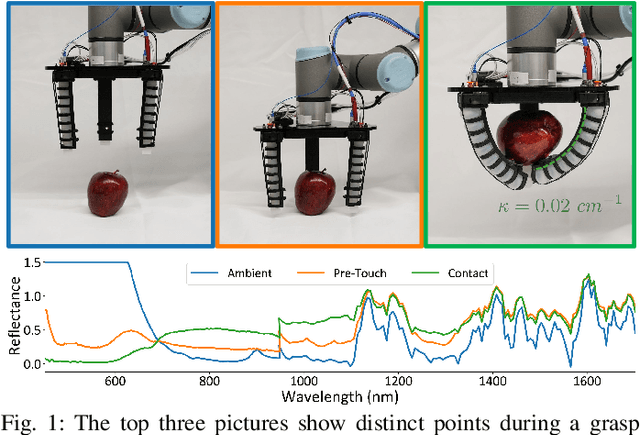
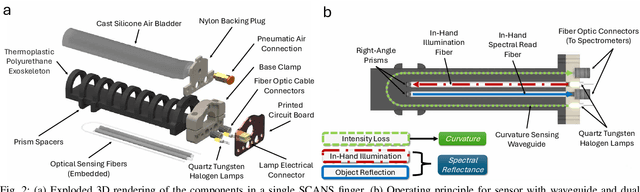
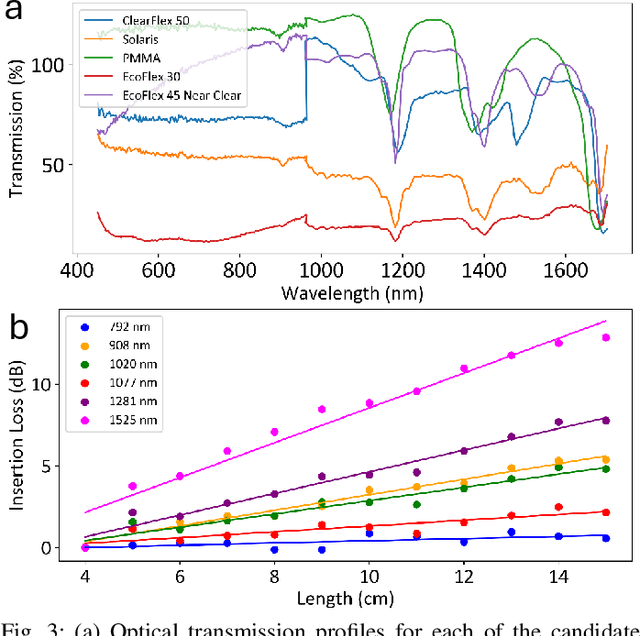
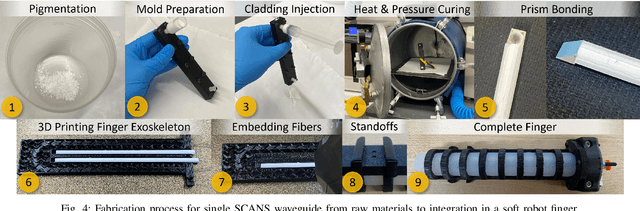
We introduce the soft curvature and spectroscopy (SCANS) system: a versatile, electronics-free, fluidically actuated soft manipulator capable of assessing the spectral properties of objects either in hand or through pre-touch caging. This platform offers a wider spectral sensing capability than previous soft robotic counterparts. We perform a material analysis to explore optimal soft substrates for spectral sensing, and evaluate both pre-touch and in-hand performance. Experiments demonstrate explainable, statistical separation across diverse object classes and sizes (metal, wood, plastic, organic, paper, foam), with large spectral angle differences between items. Through linear discriminant analysis, we show that sensitivity in the near-infrared wavelengths is critical to distinguishing visually similar objects. These capabilities advance the potential of optics as a multi-functional sensory modality for soft robots. The complete parts list, assembly guidelines, and processing code for the SCANS gripper are accessible at: https://parses-lab.github.io/scans/.
Use-Inspired Mobile Robot to Improve Safety of Building Retrofit Workforce in Constrained Spaces
Nov 25, 2024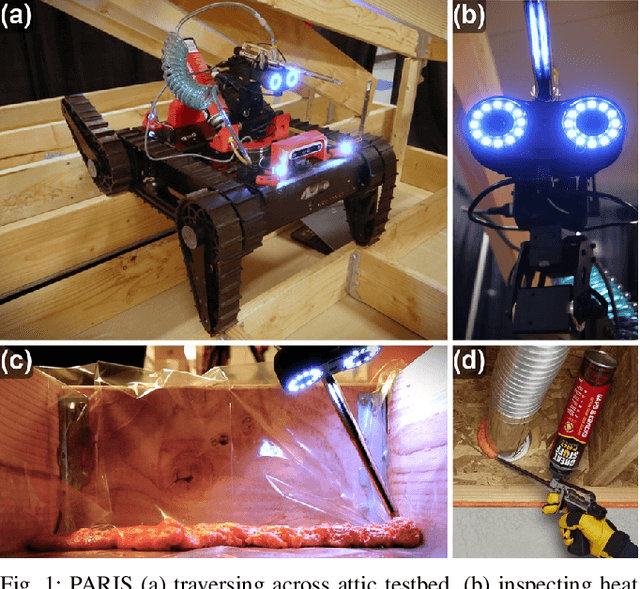
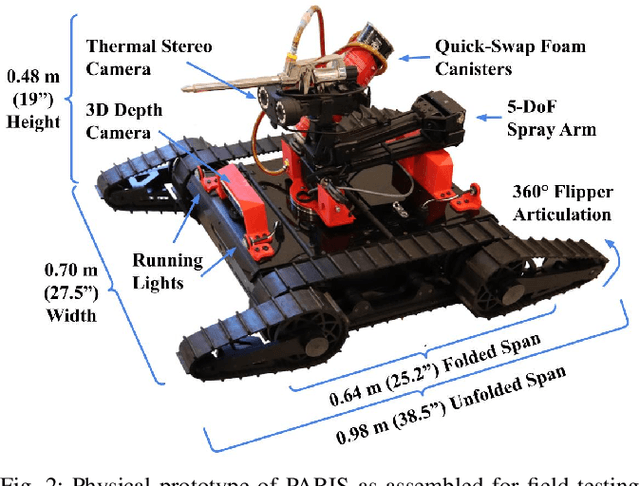
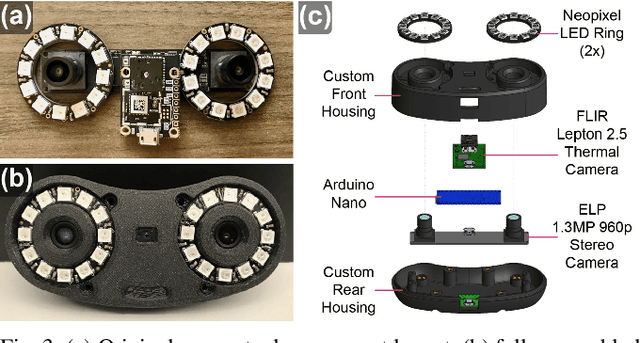
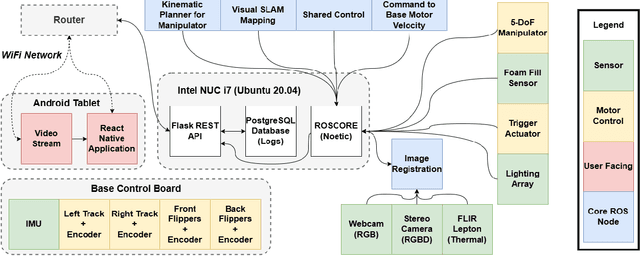
The inspection of confined critical infrastructure such as attics or crawlspaces is challenging for human operators due to insufficient task space, limited visibility, and the presence of hazardous materials. This paper introduces a prototype of PARIS (Precision Application Robot for Inaccessible Spaces): a use-inspired teleoperated mobile robot manipulator system that was conceived, developed, and tested for and selected as a Phase I winner of the U.S. Department of Energy's E-ROBOT Prize. To improve the thermal efficiency of buildings, the PARIS platform supports: 1) teleoperated mapping and navigation, enabling the human operator to explore compact spaces; 2) inspection and sensing, facilitating the identification and localization of under-insulated areas; and 3) air-sealing targeted gaps and cracks through which thermal energy is lost. The resulting versatile platform can also be tailored for targeted application of treatments and remediation in constrained spaces.
Forest Biomass Mapping with Terrestrial Hyperspectral Imaging for Wildfire Risk Monitoring
Nov 25, 2024



With the rapid increase in wildfires in the past decade, it has become necessary to detect and predict these disasters to mitigate losses to ecosystems and human lives. In this paper, we present a novel solution -- Hyper-Drive3D -- consisting of snapshot hyperspectral imaging and LiDAR, mounted on an Unmanned Ground Vehicle (UGV) that identifies areas inside forests at risk of becoming fuel for a forest fire. This system enables more accurate classification by analyzing the spectral signatures of forest vegetation. We conducted field trials in a controlled environment simulating forest conditions, yielding valuable insights into the system's effectiveness. Extensive data collection was also performed in a dense forest across varying environmental conditions and topographies to enhance the system's predictive capabilities for fire hazards and support a risk-informed, proactive forest management strategy. Additionally, we propose a framework for extracting moisture data from hyperspectral imagery and projecting it into 3D space.
Cuvis.Ai: An Open-Source, Low-Code Software Ecosystem for Hyperspectral Processing and Classification
Nov 18, 2024



Machine learning is an important tool for analyzing high-dimension hyperspectral data; however, existing software solutions are either closed-source or inextensible research products. In this paper, we present cuvis.ai, an open-source and low-code software ecosystem for data acquisition, preprocessing, and model training. The package is written in Python and provides wrappers around common machine learning libraries, allowing both classical and deep learning models to be trained on hyperspectral data. The codebase abstracts processing interconnections and data dependencies between operations to minimize code complexity for users. This software package instantiates nodes in a directed acyclic graph to handle all stages of a machine learning ecosystem, from data acquisition, including live or static data sources, to final class assignment or property prediction. User-created models contain convenient serialization methods to ensure portability and increase sharing within the research community. All code and data are available online: https://github.com/cubert-hyperspectral/cuvis.ai
Field Insights for Portable Vine Robots in Urban Search and Rescue
Nov 10, 2024


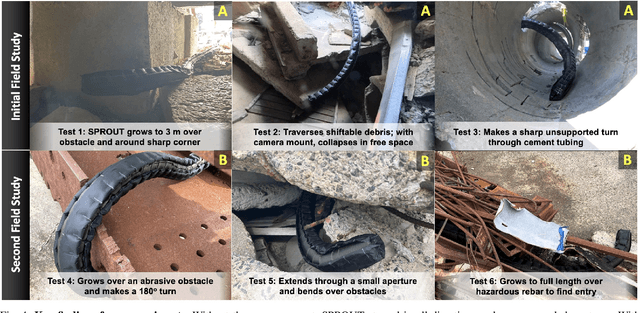
Soft, growing vine robots are well-suited for exploring cluttered, unknown environments, and are theorized to be performant during structural collapse incidents caused by earthquakes, fires, explosions, and material flaws. These vine robots grow from the tip, enabling them to navigate rubble-filled passageways easily. State-of-the-art vine robots have been tested in archaeological and other field settings, but their translational capabilities to urban search and rescue (USAR) are not well understood. To this end, we present a set of experiments designed to test the limits of a vine robot system, the Soft Pathfinding Robotic Observation Unit (SPROUT), operating in an engineered collapsed structure. Our testing is driven by a taxonomy of difficulty derived from the challenges USAR crews face navigating void spaces and their associated hazards. Initial experiments explore the viability of the vine robot form factor, both ideal and implemented, as well as the control and sensorization of the system. A secondary set of experiments applies domain-specific design improvements to increase the portability and reliability of the system. SPROUT can grow through tight apertures, around corners, and into void spaces, but requires additional development in sensorization to improve control and situational awareness.
PROSPECT: Precision Robot Spectroscopy Exploration and Characterization Tool
Mar 25, 2024



Near Infrared (NIR) spectroscopy is widely used in industrial quality control and automation to test the purity and material quality of items. In this research, we propose a novel sensorized end effector and acquisition strategy to capture spectral signatures from objects and register them with a 3D point cloud. Our methodology first takes a 3D scan of an object generated by a time-of-flight depth camera and decomposes the object into a series of planned viewpoints covering the surface. We generate motion plans for a robot manipulator and end-effector to visit these viewpoints while maintaining a fixed distance and surface normal to ensure maximal spectral signal quality enabled by the spherical motion of the end-effector. By continuously acquiring surface reflectance values as the end-effector scans the target object, the autonomous system develops a four-dimensional model of the target object: position in an R^3 coordinate frame, and a wavelength vector denoting the associated spectral signature. We demonstrate this system in building spectral-spatial object profiles of increasingly complex geometries. As a point of comparison, we show our proposed system and spectral acquisition planning yields more consistent signal signals than naive point scanning strategies for capturing spectral information over complex surface geometries. Our work represents a significant step towards high-resolution spectral-spatial sensor fusion for automated quality assessment.