 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGotta Grow Fast: Design and Benchmarking of a Tip Mount for High-Speed Vine Robots
Jun 04, 2026Soft, growing vine robots extend through tip eversion, a mechanism that enables navigation through cluttered environments. However, integrating cameras and other sensors at the tip is uniquely challenging because the material forming the tip is constantly renewed as the robot grows. This continual material turnover, combined with friction between internal layers, added tip weight, and fabric constriction, complicates sensor and tool mounting. These limitations hinder the deployment of vine robots for inspection and search tasks, where rapid growth while carrying tip-mounted sensors is essential. In this work, we present a triangular roller tip mount that reduces internal resistance during growth by rolling rather than sliding against the robot body. The design was refined through iterative failure analysis, enabling, for the first time, consistent eversion on a TPU-coated ripstop nylon vine robot. To quantitatively evaluate mount performance, we introduce a custom testbed that isolates tip mounting effects by measuring tail tension during eversion. Comparative experiments across multiple mount variants, including prior designs, show that our triangular roller mount achieves the lowest tail tension and most repeatable growth performance. These results establish both a validated tip mount design and a repeatable benchmarking framework for advancing sensor and tool integration in soft growing robots. CAD for the mount and testbed is available at: https://sprout-mitll.github.io/tip_mounts/.
Modeling Collapse of Steered Vine Robots Under Their Own Weight
Oct 29, 2025Soft, vine-inspired growing robots that move by eversion are highly mobile in confined environments, but, when faced with gaps in the environment, they may collapse under their own weight while navigating a desired path. In this work, we present a comprehensive collapse model that can predict the collapse length of steered robots in any shape using true shape information and tail tension. We validate this model by collapsing several unsteered robots without true shape information. The model accurately predicts the trends of those experiments. We then attempt to collapse a robot steered with a single actuator at different orientations. Our models accurately predict collapse when it occurs. Finally, we demonstrate how this could be used in the field by having a robot attempt a gap-crossing task with and without inflating its actuators. The robot needs its actuators inflated to cross the gap without collapsing, which our model supports. Our model has been specifically tested on straight and series pouch motor-actuated robots made of non-stretchable material, but it could be applied to other robot variations. This work enables us to model the robot's collapse behavior in any open environment and understand the parameters it needs to succeed in 3D navigation tasks.
On Steerability Factors for Growing Vine Robots
Oct 26, 2025Vine robots extend their tubular bodies by everting material from the tip, enabling navigation in complex environments with a minimalist soft body. Despite their promise for field applications, especially in the urban search and rescue domain, performance is constrained by the weight of attached sensors or tools, as well as other design and control choices. This work investigates how tip load, pressure, length, diameter, and fabrication method shape vine robot steerability--the ability to maneuver with controlled curvature--for robots that steer with series pouch motor-style pneumatic actuators. We conduct two groups of experiments: (1) studying tip load, chamber pressure, length, and diameter in a robot supporting itself against gravity, and (2) studying fabrication method and ratio of actuator to chamber pressure in a robot supported on the ground. Results show that steerability decreases with increasing tip load, is best at moderate chamber pressure, increases with length, and is largely unaffected by diameter. Robots with actuators attached on their exterior begin curving at low pressure ratios, but curvature saturates at high pressure ratios; those with actuators integrated into the robot body require higher pressure ratios to begin curving but achieve higher curvature overall. We demonstrate that robots optimized with these principles outperform those with ad hoc parameters in a mobility task that involves maximizing upward and horizontal curvatures.
Field Insights for Portable Vine Robots in Urban Search and Rescue
Nov 10, 2024


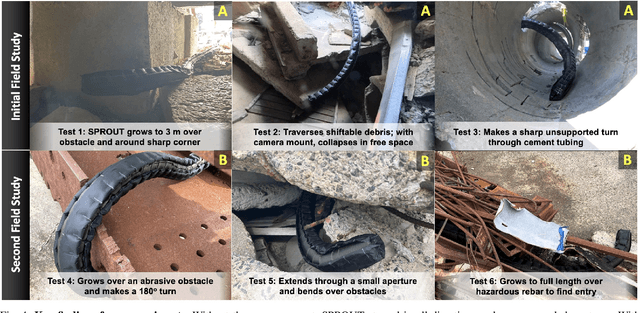
Soft, growing vine robots are well-suited for exploring cluttered, unknown environments, and are theorized to be performant during structural collapse incidents caused by earthquakes, fires, explosions, and material flaws. These vine robots grow from the tip, enabling them to navigate rubble-filled passageways easily. State-of-the-art vine robots have been tested in archaeological and other field settings, but their translational capabilities to urban search and rescue (USAR) are not well understood. To this end, we present a set of experiments designed to test the limits of a vine robot system, the Soft Pathfinding Robotic Observation Unit (SPROUT), operating in an engineered collapsed structure. Our testing is driven by a taxonomy of difficulty derived from the challenges USAR crews face navigating void spaces and their associated hazards. Initial experiments explore the viability of the vine robot form factor, both ideal and implemented, as well as the control and sensorization of the system. A secondary set of experiments applies domain-specific design improvements to increase the portability and reliability of the system. SPROUT can grow through tight apertures, around corners, and into void spaces, but requires additional development in sensorization to improve control and situational awareness.
Estimating Infinite-Dimensional Continuum Robot States From the Tip
Nov 02, 2023Knowing the state of a robot is critical for many problems, such as feedback control. For continuum robots, state estimation is incredibly challenging. First, the motion of a continuum robot involves many kinematic states, including poses, strains, and velocities. Second, all these states are infinite-dimensional due to the robot's flexible property. It has remained unclear whether these infinite-dimensional states are observable at all using existing sensing techniques. Recently, we presented a solution to this challenge. It was a mechanics-based dynamic state estimation algorithm, called a Cosserat theoretic boundary observer, which could recover all the infinite-dimensional robot states by only measuring the velocity twist of the tip. In this work, we generalize the algorithm to incorporate tip pose measurements for more tuning freedom. We also validate this algorithm offline using recorded experimental data of a tendon-driven continuum robot. Specifically, we feed the recorded tension of the tendon and the recorded tip measurements into a numerical solver of the Cosserat rod model based on our continuum robot. It is observed that, even with purposely deviated initialization, the state estimates by our algorithm quickly converge to the recorded ground truth states and closely follow the robot's actual motion.
Soft Air Pocket Force Sensors for Large Scale Flexible Robots
Jul 26, 2023



Flexible robots have advantages over rigid robots in their ability to conform physically to their environment and to form a wide variety of shapes. Sensing the force applied by or to flexible robots is useful for both navigation and manipulation tasks, but it is challenging due to the need for the sensors to withstand the robots' shape change without encumbering their functionality. Also, for robots with long or large bodies, the number of sensors required to cover the entire surface area of the robot body can be prohibitive due to high cost and complexity. We present a novel soft air pocket force sensor that is highly flexible, lightweight, relatively inexpensive, and easily scalable to various sizes. Our sensor produces a change in internal pressure that is linear with the applied force. We present results of experimental testing of how uncontrollable factors (contact location and contact area) and controllable factors (initial internal pressure, thickness, size, and number of interior seals) affect the sensitivity. We demonstrate our sensor applied to a vine robot-a soft inflatable robot that "grows" from the tip via eversion-and we show that the robot can successfully grow and steer towards an object with which it senses contact.
Collapse of Straight Soft Growing Inflated Beam Robots Under Their Own Weight
Jun 30, 2023Soft, growing inflated beam robots, also known as everting vine robots, have previously been shown to navigate confined spaces with ease. Less is known about their ability to navigate three-dimensional open spaces where they have the potential to collapse under their own weight as they attempt to move through a space. Previous work has studied collapse of inflated beams and vine robots due to purely transverse or purely axial external loads. Here, we extend previous models to predict the length at which straight vine robots will collapse under their own weight at arbitrary launch angle relative to gravity, inflated diameter, and internal pressure. Our model successfully predicts the general trends of collapse behavior of straight vine robots. We find that collapse length increases non-linearly with the robot's launch angle magnitude, linearly with the robot's diameter, and with the square root of the robot's internal pressure. We also demonstrate the use of our model to determine the robot parameters required to grow a vine robot across a gap in the floor. This work forms the foundation of an approach for modeling the collapse of vine robots and inflated beams in arbitrary shapes.
A general locomotion control framework for serially connected multi-legged robots
Dec 01, 2021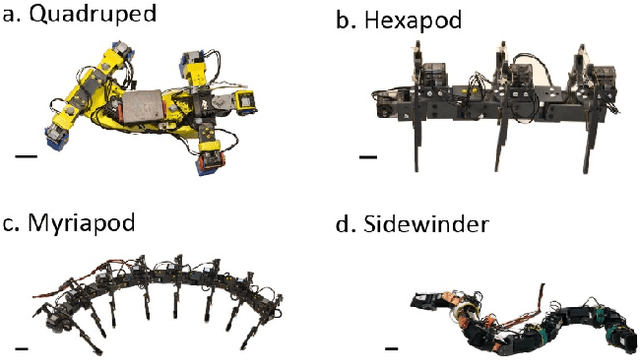

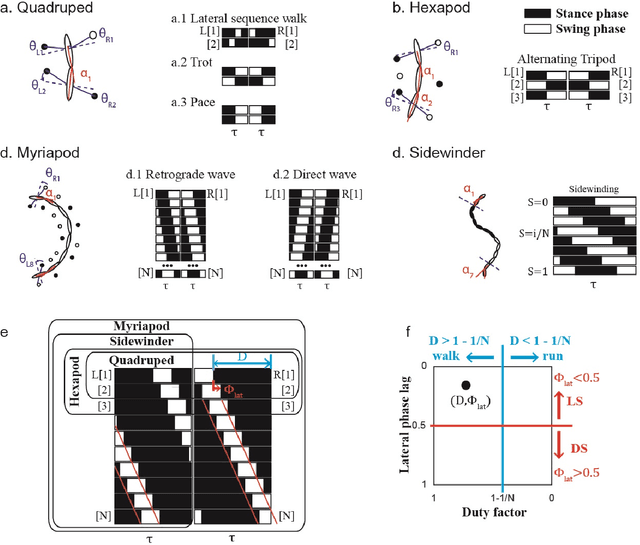
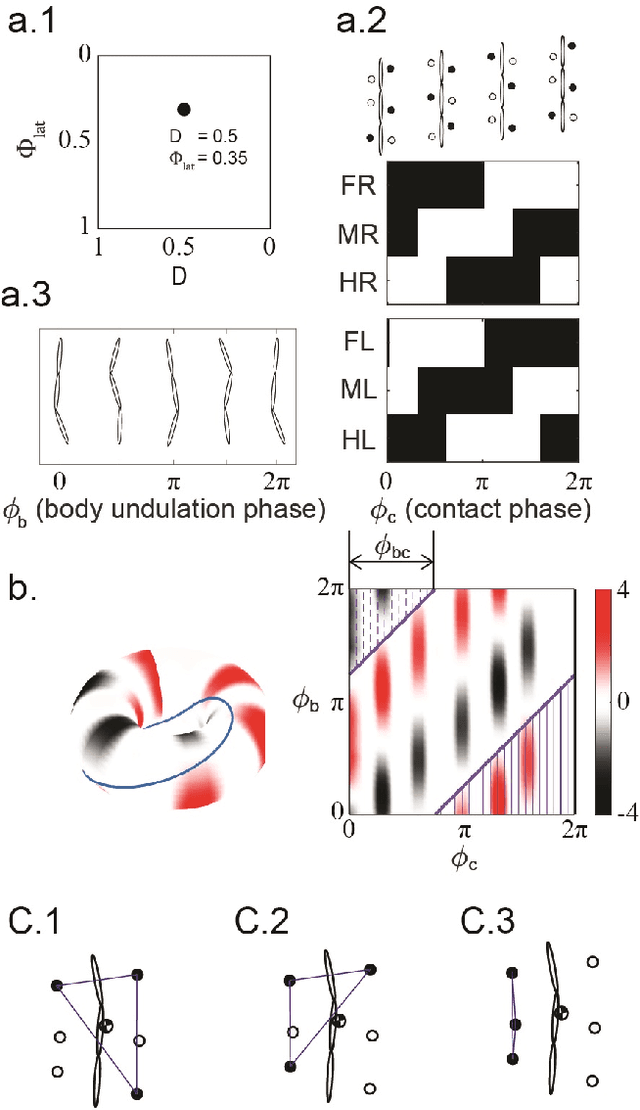
Serially connected robots are promising candidates for performing tasks in confined spaces such as search-and-rescue in large-scale disasters. Such robots are typically limbless, and we hypothesize that the addition of limbs could improve mobility. However, a challenge in designing and controlling such devices lies in the coordination of high-dimensional redundant modules in a way that improves mobility. Here we develop a general framework to control serially connected multi-legged robots. Specifically, we combine two approaches to build a general shape control scheme which can provide baseline patterns of self-deformation ("gaits") for effective locomotion in diverse robot morphologies. First, we take inspiration from a dimensionality reduction and a biological gait classification scheme to generate cyclic patterns of body deformation and foot lifting/lowering, which facilitate generation of arbitrary substrate contact patterns. Second, we use geometric mechanics methods to facilitates identification of optimal phasing of these undulations to maximize speed and/or stability. Our scheme allows the development of effective gaits in multi-legged robots locomoting on flat frictional terrain with diverse number of limbs (4, 6, 16, and even 0 limbs) and body actuation capabilities (including sidewinding gaits on limbless devices). By properly coordinating the body undulation and the leg placement, our framework combines the advantages of both limbless robots (modularity) and legged robots (mobility). We expect that our framework can provide general control schemes for the rapid deployment of general multi-legged robots, paving the ways toward machines that can traverse complex environments under real-life conditions.