 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField Insights for Portable Vine Robots in Urban Search and Rescue
Nov 10, 2024


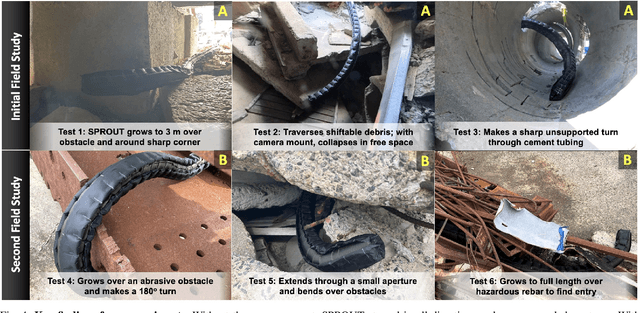
Soft, growing vine robots are well-suited for exploring cluttered, unknown environments, and are theorized to be performant during structural collapse incidents caused by earthquakes, fires, explosions, and material flaws. These vine robots grow from the tip, enabling them to navigate rubble-filled passageways easily. State-of-the-art vine robots have been tested in archaeological and other field settings, but their translational capabilities to urban search and rescue (USAR) are not well understood. To this end, we present a set of experiments designed to test the limits of a vine robot system, the Soft Pathfinding Robotic Observation Unit (SPROUT), operating in an engineered collapsed structure. Our testing is driven by a taxonomy of difficulty derived from the challenges USAR crews face navigating void spaces and their associated hazards. Initial experiments explore the viability of the vine robot form factor, both ideal and implemented, as well as the control and sensorization of the system. A secondary set of experiments applies domain-specific design improvements to increase the portability and reliability of the system. SPROUT can grow through tight apertures, around corners, and into void spaces, but requires additional development in sensorization to improve control and situational awareness.