 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCANS: A Soft Gripper with Curvature and Spectroscopy Sensors for In-Hand Material Differentiation
Oct 02, 2025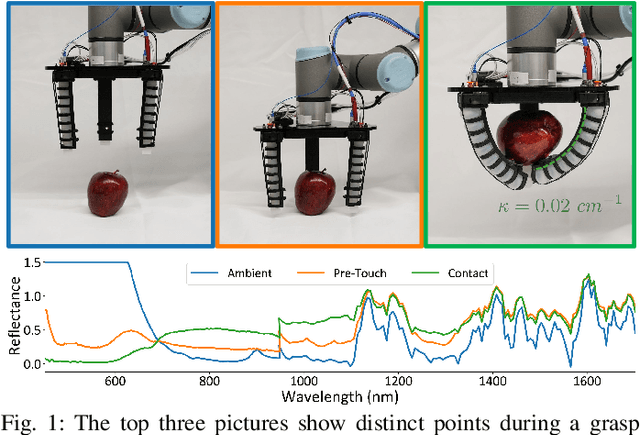
We introduce the soft curvature and spectroscopy (SCANS) system: a versatile, electronics-free, fluidically actuated soft manipulator capable of assessing the spectral properties of objects either in hand or through pre-touch caging. This platform offers a wider spectral sensing capability than previous soft robotic counterparts. We perform a material analysis to explore optimal soft substrates for spectral sensing, and evaluate both pre-touch and in-hand performance. Experiments demonstrate explainable, statistical separation across diverse object classes and sizes (metal, wood, plastic, organic, paper, foam), with large spectral angle differences between items. Through linear discriminant analysis, we show that sensitivity in the near-infrared wavelengths is critical to distinguishing visually similar objects. These capabilities advance the potential of optics as a multi-functional sensory modality for soft robots. The complete parts list, assembly guidelines, and processing code for the SCANS gripper are accessible at: https://parses-lab.github.io/scans/.
PROSPECT: Precision Robot Spectroscopy Exploration and Characterization Tool
Mar 25, 2024



Near Infrared (NIR) spectroscopy is widely used in industrial quality control and automation to test the purity and material quality of items. In this research, we propose a novel sensorized end effector and acquisition strategy to capture spectral signatures from objects and register them with a 3D point cloud. Our methodology first takes a 3D scan of an object generated by a time-of-flight depth camera and decomposes the object into a series of planned viewpoints covering the surface. We generate motion plans for a robot manipulator and end-effector to visit these viewpoints while maintaining a fixed distance and surface normal to ensure maximal spectral signal quality enabled by the spherical motion of the end-effector. By continuously acquiring surface reflectance values as the end-effector scans the target object, the autonomous system develops a four-dimensional model of the target object: position in an R^3 coordinate frame, and a wavelength vector denoting the associated spectral signature. We demonstrate this system in building spectral-spatial object profiles of increasingly complex geometries. As a point of comparison, we show our proposed system and spectral acquisition planning yields more consistent signal signals than naive point scanning strategies for capturing spectral information over complex surface geometries. Our work represents a significant step towards high-resolution spectral-spatial sensor fusion for automated quality assessment.
Hyper-Drive: Visible-Short Wave Infrared Hyperspectral Imaging Datasets for Robots in Unstructured Environments
Aug 15, 2023Hyperspectral sensors have enjoyed widespread use in the realm of remote sensing; however, they must be adapted to a format in which they can be operated onboard mobile robots. In this work, we introduce a first-of-its-kind system architecture with snapshot hyperspectral cameras and point spectrometers to efficiently generate composite datacubes from a robotic base. Our system collects and registers datacubes spanning the visible to shortwave infrared (660-1700 nm) spectrum while simultaneously capturing the ambient solar spectrum reflected off a white reference tile. We collect and disseminate a large dataset of more than 500 labeled datacubes from on-road and off-road terrain compliant with the ATLAS ontology to further the integration and demonstration of hyperspectral imaging (HSI) as beneficial in terrain class separability. Our analysis of this data demonstrates that HSI is a significant opportunity to increase understanding of scene composition from a robot-centric context. All code and data are open source online: https://river-lab.github.io/hyper_drive_data