 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROSPECT: Precision Robot Spectroscopy Exploration and Characterization Tool
Mar 25, 2024



Near Infrared (NIR) spectroscopy is widely used in industrial quality control and automation to test the purity and material quality of items. In this research, we propose a novel sensorized end effector and acquisition strategy to capture spectral signatures from objects and register them with a 3D point cloud. Our methodology first takes a 3D scan of an object generated by a time-of-flight depth camera and decomposes the object into a series of planned viewpoints covering the surface. We generate motion plans for a robot manipulator and end-effector to visit these viewpoints while maintaining a fixed distance and surface normal to ensure maximal spectral signal quality enabled by the spherical motion of the end-effector. By continuously acquiring surface reflectance values as the end-effector scans the target object, the autonomous system develops a four-dimensional model of the target object: position in an R^3 coordinate frame, and a wavelength vector denoting the associated spectral signature. We demonstrate this system in building spectral-spatial object profiles of increasingly complex geometries. As a point of comparison, we show our proposed system and spectral acquisition planning yields more consistent signal signals than naive point scanning strategies for capturing spectral information over complex surface geometries. Our work represents a significant step towards high-resolution spectral-spatial sensor fusion for automated quality assessment.
Mobile MoCap: Retroreflector Localization On-The-Go
Mar 23, 2023



Motion capture (MoCap) through tracking retroreflectors obtains high precision pose estimation, which is frequently used in robotics. Unlike MoCap, fiducial marker-based tracking methods do not require a static camera setup to perform relative localization. Popular pose-estimating systems based on fiducial markers have lower localization accuracy than MoCap. As a solution, we propose Mobile MoCap, a system that employs inexpensive near-infrared cameras for precise relative localization in dynamic environments. We present a retroreflector feature detector that performs 6-DoF (six degrees-of-freedom) tracking and operates with minimal camera exposure times to reduce motion blur. To evaluate different localization techniques in a mobile robot setup, we mount our Mobile MoCap system, as well as a standard RGB camera, onto a precision-controlled linear rail for the purposes of retroreflective and fiducial marker tracking, respectively. We benchmark the two systems against each other, varying distance, marker viewing angle, and relative velocities. Our stereo-based Mobile MoCap approach obtains higher position and orientation accuracy than the fiducial approach. The code for Mobile MoCap is implemented in ROS 2 and made publicly available at https://github.com/RIVeR-Lab/mobile_mocap.
Deep Reinforcement Learning based Robot Navigation in Dynamic Environments using Occupancy Values of Motion Primitives
Aug 17, 2022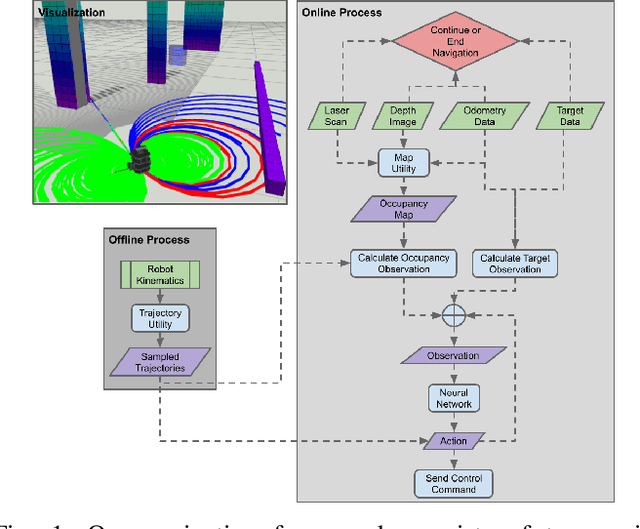
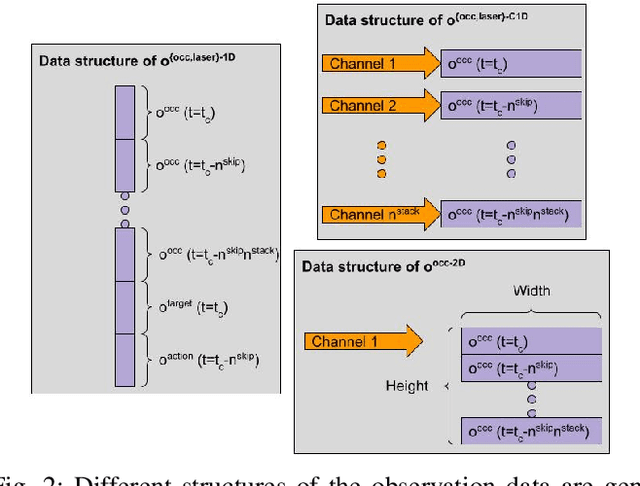
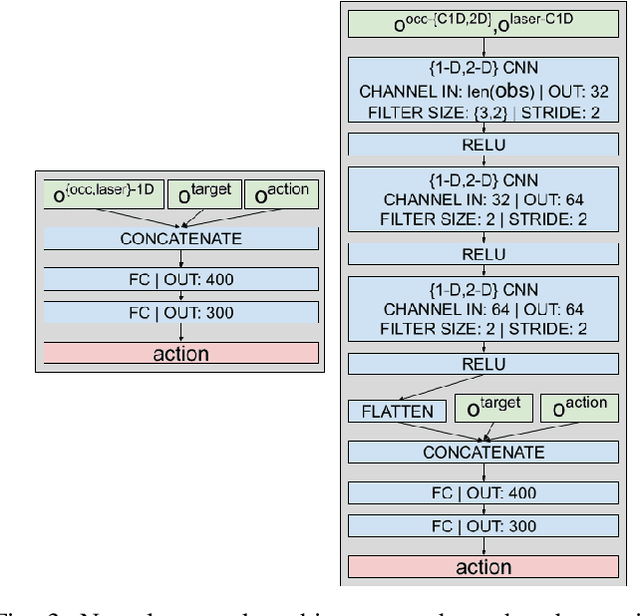
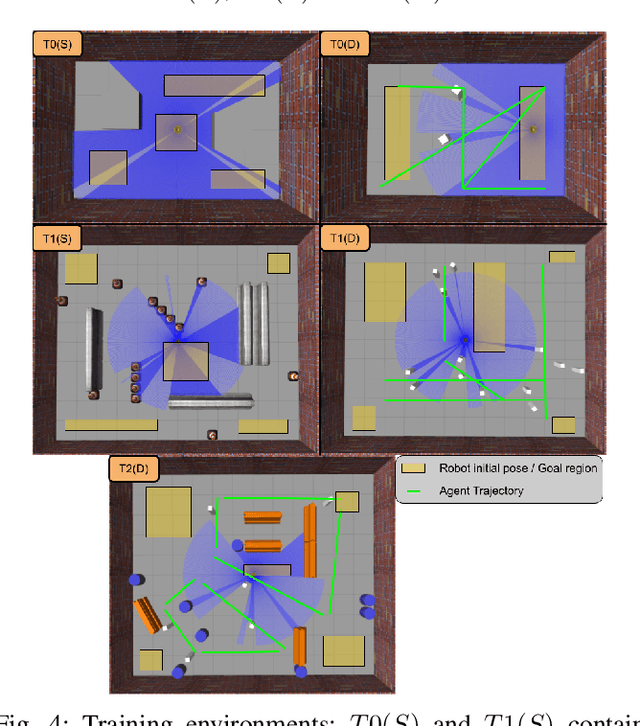
This paper presents a Deep Reinforcement Learning based navigation approach in which we define the occupancy observations as heuristic evaluations of motion primitives, rather than using raw sensor data. Our method enables fast mapping of the occupancy data, generated by multi-sensor fusion, into trajectory values in 3D workspace. The computationally efficient trajectory evaluation allows dense sampling of the action space. We utilize our occupancy observations in different data structures to analyze their effects on both training process and navigation performance. We train and test our methodology on two different robots within challenging physics-based simulation environments including static and dynamic obstacles. We benchmark our occupancy representations with other conventional data structures from state-of-the-art methods. The trained navigation policies are also validated successfully with physical robots in dynamic environments. The results show that our method not only decreases the required training time but also improves the navigation performance as compared to other occupancy representations. The open-source implementation of our work and all related info are available at \url{https://github.com/RIVeR-Lab/tentabot}.