 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse-Inspired Mobile Robot to Improve Safety of Building Retrofit Workforce in Constrained Spaces
Nov 25, 2024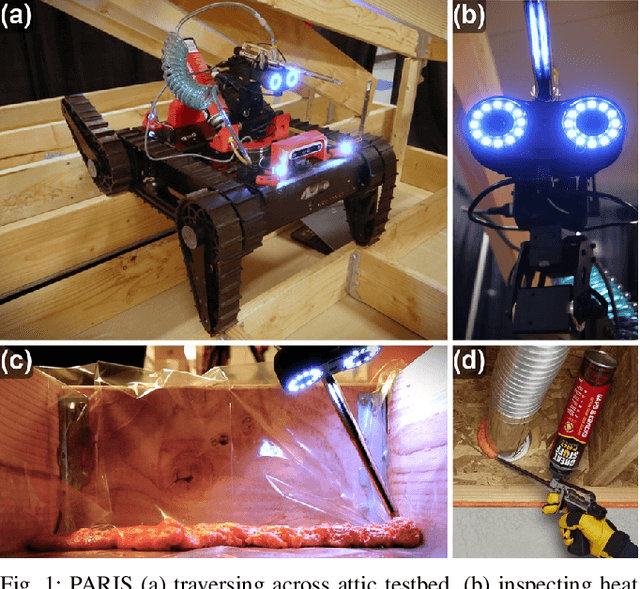
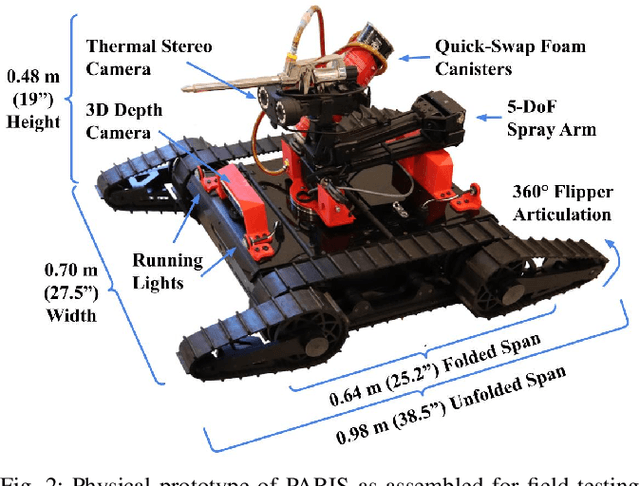
The inspection of confined critical infrastructure such as attics or crawlspaces is challenging for human operators due to insufficient task space, limited visibility, and the presence of hazardous materials. This paper introduces a prototype of PARIS (Precision Application Robot for Inaccessible Spaces): a use-inspired teleoperated mobile robot manipulator system that was conceived, developed, and tested for and selected as a Phase I winner of the U.S. Department of Energy's E-ROBOT Prize. To improve the thermal efficiency of buildings, the PARIS platform supports: 1) teleoperated mapping and navigation, enabling the human operator to explore compact spaces; 2) inspection and sensing, facilitating the identification and localization of under-insulated areas; and 3) air-sealing targeted gaps and cracks through which thermal energy is lost. The resulting versatile platform can also be tailored for targeted application of treatments and remediation in constrained spaces.
PROSPECT: Precision Robot Spectroscopy Exploration and Characterization Tool
Mar 25, 2024



Near Infrared (NIR) spectroscopy is widely used in industrial quality control and automation to test the purity and material quality of items. In this research, we propose a novel sensorized end effector and acquisition strategy to capture spectral signatures from objects and register them with a 3D point cloud. Our methodology first takes a 3D scan of an object generated by a time-of-flight depth camera and decomposes the object into a series of planned viewpoints covering the surface. We generate motion plans for a robot manipulator and end-effector to visit these viewpoints while maintaining a fixed distance and surface normal to ensure maximal spectral signal quality enabled by the spherical motion of the end-effector. By continuously acquiring surface reflectance values as the end-effector scans the target object, the autonomous system develops a four-dimensional model of the target object: position in an R^3 coordinate frame, and a wavelength vector denoting the associated spectral signature. We demonstrate this system in building spectral-spatial object profiles of increasingly complex geometries. As a point of comparison, we show our proposed system and spectral acquisition planning yields more consistent signal signals than naive point scanning strategies for capturing spectral information over complex surface geometries. Our work represents a significant step towards high-resolution spectral-spatial sensor fusion for automated quality assessment.
Battery-Swapping Multi-Agent System for Sustained Operation of Large Planetary Fleets
Jan 16, 2024We propose a novel, heterogeneous multi-agent architecture that miniaturizes rovers by outsourcing power generation to a central hub. By delegating power generation and distribution functions to this hub, the size, weight, power, and cost (SWAP-C) per rover are reduced, enabling efficient fleet scaling. As these rovers conduct mission tasks around the terrain, the hub charges an array of replacement battery modules. When a rover requires charging, it returns to the hub to initiate an autonomous docking sequence and exits with a fully charged battery. This confers an advantage over direct charging methods, such as wireless or wired charging, by replenishing a rover in minutes as opposed to hours, increasing net rover uptime. This work shares an open-source platform developed to demonstrate battery swapping on unknown field terrain. We detail our design methodologies utilized for increasing system reliability, with a focus on optimization, robust mechanical design, and verification. Optimization of the system is discussed, including the design of passive guide rails through simulation-based optimization methods which increase the valid docking configuration space by 258%. The full system was evaluated during integrated testing, where an average servicing time of 98 seconds was achieved on surfaces with a gradient up to 10{\deg}. We conclude by briefly proposing flight considerations for advancing the system toward a space-ready design. In sum, this prototype represents a proof of concept for autonomous docking and battery transfer on field terrain, advancing its Technology Readiness Level (TRL) from 1 to 3.