 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp, Slide, Roll: Comparative Analysis of Contact Modes for Tactile-Based Shape Reconstruction
Feb 26, 2026Tactile sensing allows robots to gather detailed geometric information about objects through physical interaction, complementing vision-based approaches. However, efficiently acquiring useful tactile data remains challenging due to the time-consuming nature of physical contact and the need to strategically choose contact locations that maximize information gain while minimizing physical interactions. This paper studies how different contact modes affect object shape reconstruction using a tactile-enabled dexterous gripper. We compare three contact interaction modes: grasp-releasing, sliding induced by finger-grazing, and palm-rolling. These contact modes are combined with an information-theoretic exploration framework that guides subsequent sampling locations using a shape completion model. Our results show that the improved tactile sensing efficiency of finger-grazing and palm-rolling translates into faster convergence in shape reconstruction, requiring 34% fewer physical interactions while improving reconstruction accuracy by 55%. We validate our approach using a UR5e robot arm equipped with an Inspire-Robots Dexterous Hand, showing robust performance across primitive object geometries.
Adaptive Time Step Flow Matching for Autonomous Driving Motion Planning
Feb 14, 2026Autonomous driving requires reasoning about interactions with surrounding traffic. A prevailing approach is large-scale imitation learning on expert driving datasets, aimed at generalizing across diverse real-world scenarios. For online trajectory generation, such methods must operate at real-time rates. Diffusion models require hundreds of denoising steps at inference, resulting in high latency. Consistency models mitigate this issue but rely on carefully tuned noise schedules to capture the multimodal action distributions common in autonomous driving. Adapting the schedule, typically requires expensive retraining. To address these limitations, we propose a framework based on conditional flow matching that jointly predicts future motions of surrounding agents and plans the ego trajectory in real time. We train a lightweight variance estimator that selects the number of inference steps online, removing the need for retraining to balance runtime and imitation learning performance. To further enhance ride quality, we introduce a trajectory post-processing step cast as a convex quadratic program, with negligible computational overhead. Trained on the Waymo Open Motion Dataset, the framework performs maneuvers such as lane changes, cruise control, and navigating unprotected left turns without requiring scenario-specific tuning. Our method maintains a 20 Hz update rate on an NVIDIA RTX 3070 GPU, making it suitable for online deployment. Compared to transformer, diffusion, and consistency model baselines, we achieve improved trajectory smoothness and better adherence to dynamic constraints. Experiment videos and code implementations can be found at https://flow-matching-self-driving.github.io/.
"Meet My Sidekick!": Effects of Separate Identities and Control of a Single Robot in HRI
Feb 07, 2026The presentation of a robot's capability and identity directly influences a human collaborator's perception and implicit trust in the robot. Unlike humans, a physical robot can simultaneously present different identities and have them reside and control different parts of the robot. This paper presents a novel study that investigates how users perceive a robot where different robot control domains (head and gripper) are presented as independent robots. We conducted a mixed design study where participants experienced one of three presentations: a single robot, two agents with shared full control (co-embodiment), or two agents with split control across robot control domains (split-embodiment). Participants underwent three distinct tasks -- a mundane data entry task where the robot provides motivational support, an individual sorting task with isolated robot failures, and a collaborative arrangement task where the robot causes a failure that directly affects the human participant. Participants perceived the robot as residing in the different control domains and were able to associate robot failure with different identities. This work signals how future robots can leverage different embodiment configurations to obtain the benefit of multiple robots within a single body.
ViTa-Zero: Zero-shot Visuotactile Object 6D Pose Estimation
Apr 17, 2025Object 6D pose estimation is a critical challenge in robotics, particularly for manipulation tasks. While prior research combining visual and tactile (visuotactile) information has shown promise, these approaches often struggle with generalization due to the limited availability of visuotactile data. In this paper, we introduce ViTa-Zero, a zero-shot visuotactile pose estimation framework. Our key innovation lies in leveraging a visual model as its backbone and performing feasibility checking and test-time optimization based on physical constraints derived from tactile and proprioceptive observations. Specifically, we model the gripper-object interaction as a spring-mass system, where tactile sensors induce attractive forces, and proprioception generates repulsive forces. We validate our framework through experiments on a real-world robot setup, demonstrating its effectiveness across representative visual backbones and manipulation scenarios, including grasping, object picking, and bimanual handover. Compared to the visual models, our approach overcomes some drastic failure modes while tracking the in-hand object pose. In our experiments, our approach shows an average increase of 55% in AUC of ADD-S and 60% in ADD, along with an 80% lower position error compared to FoundationPose.
Use-Inspired Mobile Robot to Improve Safety of Building Retrofit Workforce in Constrained Spaces
Nov 25, 2024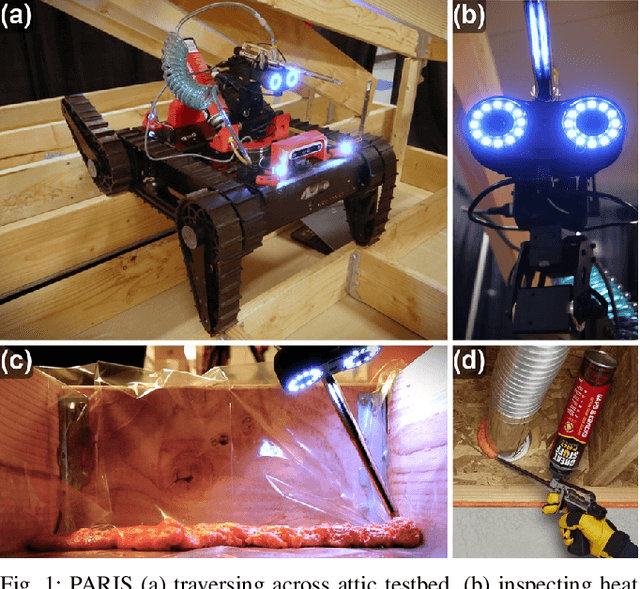
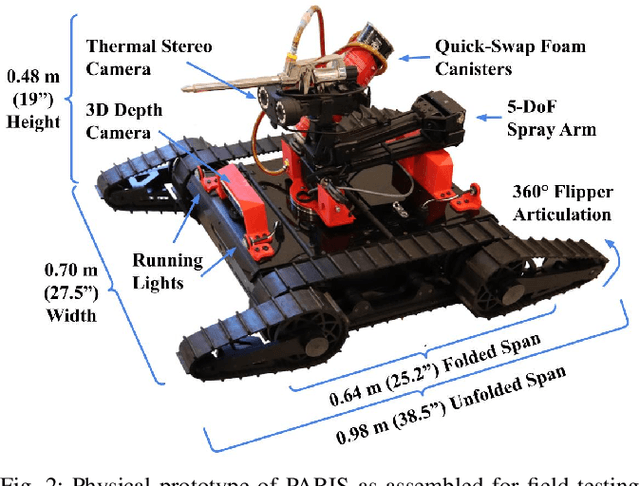
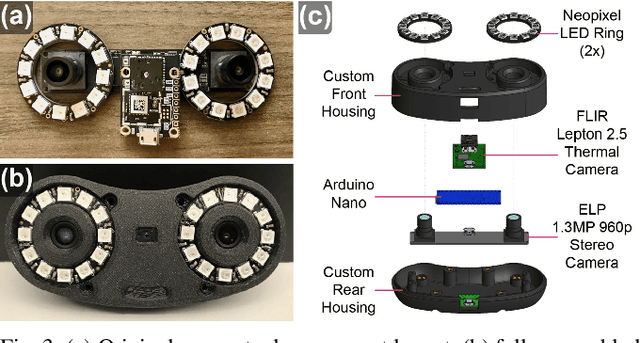
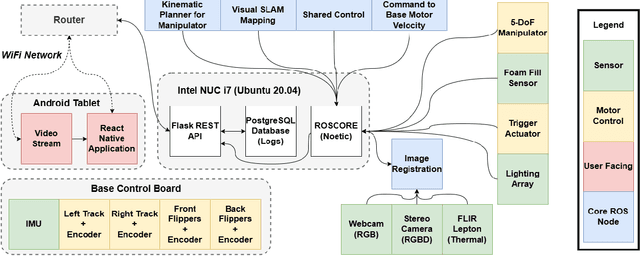
The inspection of confined critical infrastructure such as attics or crawlspaces is challenging for human operators due to insufficient task space, limited visibility, and the presence of hazardous materials. This paper introduces a prototype of PARIS (Precision Application Robot for Inaccessible Spaces): a use-inspired teleoperated mobile robot manipulator system that was conceived, developed, and tested for and selected as a Phase I winner of the U.S. Department of Energy's E-ROBOT Prize. To improve the thermal efficiency of buildings, the PARIS platform supports: 1) teleoperated mapping and navigation, enabling the human operator to explore compact spaces; 2) inspection and sensing, facilitating the identification and localization of under-insulated areas; and 3) air-sealing targeted gaps and cracks through which thermal energy is lost. The resulting versatile platform can also be tailored for targeted application of treatments and remediation in constrained spaces.
Data-Driven Sampling Based Stochastic MPC for Skid-Steer Mobile Robot Navigation
Nov 05, 2024



Traditional approaches to motion modeling for skid-steer robots struggle with capturing nonlinear tire-terrain dynamics, especially during high-speed maneuvers. In this paper, we tackle such nonlinearities by enhancing a dynamic unicycle model with Gaussian Process (GP) regression outputs. This enables us to develop an adaptive, uncertainty-informed navigation formulation. We solve the resultant stochastic optimal control problem using a chance-constrained Model Predictive Path Integral (MPPI) control method. This approach formulates both obstacle avoidance and path-following as chance constraints, accounting for residual uncertainties from the GP to ensure safety and reliability in control. Leveraging GPU acceleration, we efficiently manage the non-convex nature of the problem, ensuring real-time performance. Our approach unifies path-following and obstacle avoidance across different terrains, unlike prior works which typically focus on one or the other. We compare our GP-MPPI method against unicycle and data-driven kinematic models within the MPPI framework. In simulations, our approach shows superior tracking accuracy and obstacle avoidance. We further validate our approach through hardware experiments on a skid-steer robot platform, demonstrating its effectiveness in high-speed navigation. The GPU implementation of the proposed method and supplementary video footage are available at https: //stochasticmppi.github.io.
Chance-Constrained Convex MPC for Robust Quadruped Locomotion Under Parametric and Additive Uncertainties
Nov 05, 2024



Recent advances in quadrupedal locomotion have focused on improving stability and performance across diverse environments. However, existing methods often lack adequate safety analysis and struggle to adapt to varying payloads and complex terrains, typically requiring extensive tuning. To overcome these challenges, we propose a Chance-Constrained Model Predictive Control (CCMPC) framework that explicitly models payload and terrain variability as distributions of parametric and additive disturbances within the single rigid body dynamics (SRBD) model. Our approach ensures safe and consistent performance under uncertain dynamics by expressing the model friction cone constraints, which define the feasible set of ground reaction forces, as chance constraints. Moreover, we solve the resulting stochastic control problem using a computationally efficient quadratic programming formulation. Extensive Monte Carlo simulations of quadrupedal locomotion across varying payloads and complex terrains demonstrate that CCMPC significantly outperforms two competitive benchmarks: Linear MPC (LMPC) and MPC with hand-tuned safety margins to maintain stability, reduce foot slippage, and track the center of mass. Hardware experiments on the Unitree Go1 robot show successful locomotion across various indoor and outdoor terrains with unknown loads exceeding 50% of the robot body weight, despite no additional parameter tuning. A video of the results and accompanying code can be found at: https://cc-mpc.github.io/.
Predictive Mapping of Spectral Signatures from RGB Imagery for Off-Road Terrain Analysis
May 08, 2024Accurate identification of complex terrain characteristics, such as soil composition and coefficient of friction, is essential for model-based planning and control of mobile robots in off-road environments. Spectral signatures leverage distinct patterns of light absorption and reflection to identify various materials, enabling precise characterization of their inherent properties. Recent research in robotics has explored the adoption of spectroscopy to enhance perception and interaction with environments. However, the significant cost and elaborate setup required for mounting these sensors present formidable barriers to widespread adoption. In this study, we introduce RS-Net (RGB to Spectral Network), a deep neural network architecture designed to map RGB images to corresponding spectral signatures. We illustrate how RS-Net can be synergistically combined with Co-Learning techniques for terrain property estimation. Initial results demonstrate the effectiveness of this approach in characterizing spectral signatures across an extensive off-road real-world dataset. These findings highlight the feasibility of terrain property estimation using only RGB cameras.
Learning a Stable, Safe, Distributed Feedback Controller for a Heterogeneous Platoon of Vehicles
Apr 18, 2024Platooning of autonomous vehicles has the potential to increase safety and fuel efficiency on highways. The goal of platooning is to have each vehicle drive at some speed (set by the leader) while maintaining a safe distance from its neighbors. Many prior works have analyzed various controllers for platooning, most commonly linear feedback and distributed model predictive controllers. In this work, we introduce an algorithm for learning a stable, safe, distributed controller for a heterogeneous platoon. Our algorithm relies on recent developments in learning neural network stability and safety certificates. We train a controller for autonomous platooning in simulation and evaluate its performance on hardware with a platoon of four F1Tenth vehicles. We then perform further analysis in simulation with a platoon of 100 vehicles. Experimental results demonstrate the practicality of the algorithm and the learned controller by comparing the performance of the neural network controller to linear feedback and distributed model predictive controllers.
User-customizable Shared Control for Fine Teleoperation via Virtual Reality
Mar 19, 2024



Shared control can ease and enhance a human operator's ability to teleoperate robots, particularly for intricate tasks demanding fine control over multiple degrees of freedom. However, the arbitration process dictating how much autonomous assistance to administer in shared control can confuse novice operators and impede their understanding of the robot's behavior. To overcome these adverse side-effects, we propose a novel formulation of shared control that enables operators to tailor the arbitration to their unique capabilities and preferences. Unlike prior approaches to customizable shared control where users could indirectly modify the latent parameters of the arbitration function by issuing a feedback command, we instead make these parameters observable and directly editable via a virtual reality (VR) interface. We present our user-customizable shared control method for a teleoperation task in SE(3), known as the buzz wire game. A user study is conducted with participants teleoperating a robotic arm in VR to complete the game. The experiment spanned two weeks per subject to investigate longitudinal trends. Our findings reveal that users allowed to interactively tune the arbitration parameters across trials generalize well to adaptations in the task, exhibiting improvements in precision and fluency over direct teleoperation and conventional shared control.