 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Mapping of Spectral Signatures from RGB Imagery for Off-Road Terrain Analysis
May 08, 2024Accurate identification of complex terrain characteristics, such as soil composition and coefficient of friction, is essential for model-based planning and control of mobile robots in off-road environments. Spectral signatures leverage distinct patterns of light absorption and reflection to identify various materials, enabling precise characterization of their inherent properties. Recent research in robotics has explored the adoption of spectroscopy to enhance perception and interaction with environments. However, the significant cost and elaborate setup required for mounting these sensors present formidable barriers to widespread adoption. In this study, we introduce RS-Net (RGB to Spectral Network), a deep neural network architecture designed to map RGB images to corresponding spectral signatures. We illustrate how RS-Net can be synergistically combined with Co-Learning techniques for terrain property estimation. Initial results demonstrate the effectiveness of this approach in characterizing spectral signatures across an extensive off-road real-world dataset. These findings highlight the feasibility of terrain property estimation using only RGB cameras.
Using Texture to Classify Forests Separately from Vegetation
May 01, 2024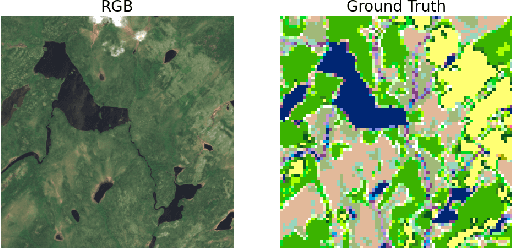
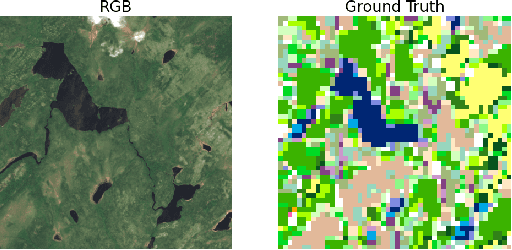
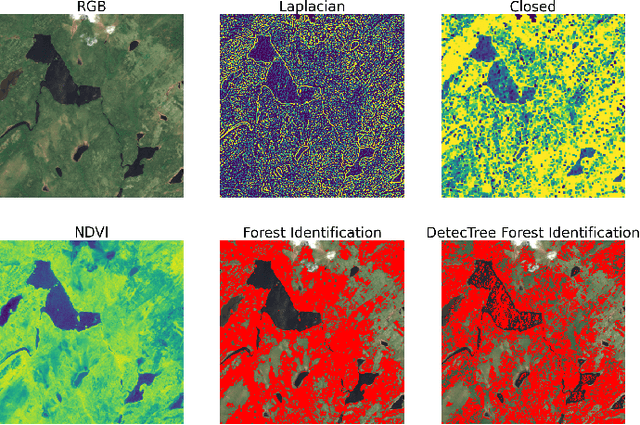
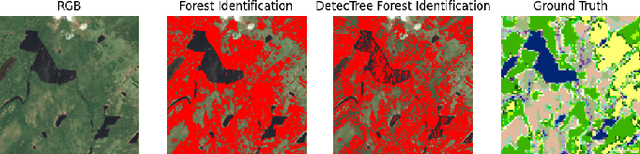
Identifying terrain within satellite image data is a key issue in geographical information sciences, with numerous environmental and safety implications. Many techniques exist to derive classifications from spectral data captured by satellites. However, the ability to reliably classify vegetation remains a challenge. In particular, no precise methods exist for classifying forest vs. non-forest vegetation in high-level satellite images. This paper provides an initial proposal for a static, algorithmic process to identify forest regions in satellite image data through texture features created from detected edges and the NDVI ratio captured by Sentinel-2 satellite images. With strong initial results, this paper also identifies the next steps to improve the accuracy of the classification and verification processes.