 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCANS: A Soft Gripper with Curvature and Spectroscopy Sensors for In-Hand Material Differentiation
Oct 02, 2025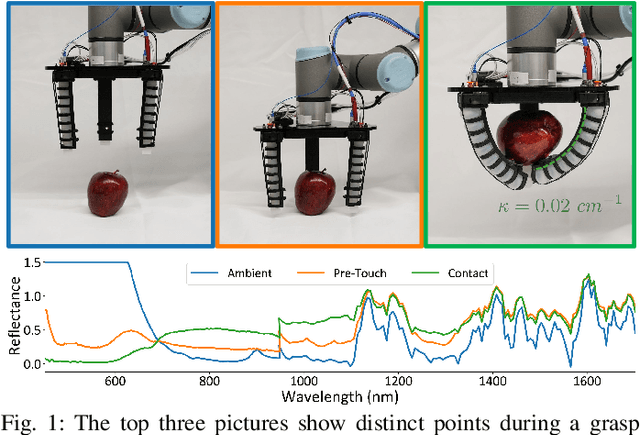
We introduce the soft curvature and spectroscopy (SCANS) system: a versatile, electronics-free, fluidically actuated soft manipulator capable of assessing the spectral properties of objects either in hand or through pre-touch caging. This platform offers a wider spectral sensing capability than previous soft robotic counterparts. We perform a material analysis to explore optimal soft substrates for spectral sensing, and evaluate both pre-touch and in-hand performance. Experiments demonstrate explainable, statistical separation across diverse object classes and sizes (metal, wood, plastic, organic, paper, foam), with large spectral angle differences between items. Through linear discriminant analysis, we show that sensitivity in the near-infrared wavelengths is critical to distinguishing visually similar objects. These capabilities advance the potential of optics as a multi-functional sensory modality for soft robots. The complete parts list, assembly guidelines, and processing code for the SCANS gripper are accessible at: https://parses-lab.github.io/scans/.
Hold 'em and Fold 'em: Towards Human-scale, Feedback-Controlled Soft Origami Robots
Jan 18, 2024An underdeveloped capability in soft robotics is proprioceptive feedback control, where soft actuators can be sensed and controlled using only sensors on the robot's body. Additionally, soft actuators are often unable to support human-scale loads due to the extremely compliant materials in use. Developing both feedback control and the ability to actuate under large loads (e.g. 500 N) are key capacities required to move soft robotics into everyday applications. In this work, we independently demonstrate these key factors towards controlling and actuating human-scale loads: proprioceptive (embodied) feedback control of a soft, pneumatically-actuated origami robot; and actuation of these origami origami robots under a person's weight in an open-loop configuration. In both demonstrations, the actuators are controlled by internal fluidic pressure. Capacitive sensors patterned onto the robot provide position estimation and serve as input to a feedback controller. We demonstrate position control of a single actuator during stepped setpoints and sinusoidal trajectory following, with root mean square error (RMSE) below 4 mm. We also showcase the actuator's potential towards human-scale robotics as an "origami balance board" by joining three actuators into an open-loop controlled system with a platform that varies its height, roll, and pitch. This work contributes to the field of soft robotics by demonstrating closed-loop feedback position control without visual tracking as an input and lightweight, soft actuators that can support a person's weight. The project repository, including videos, CAD files, and ROS code, is available at https://parses-lab.github.io/kresling_control.