 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHASHI: Highly Adaptable Seafood Handling Instrument for Manipulation in Industrial Settings
Paper and Code
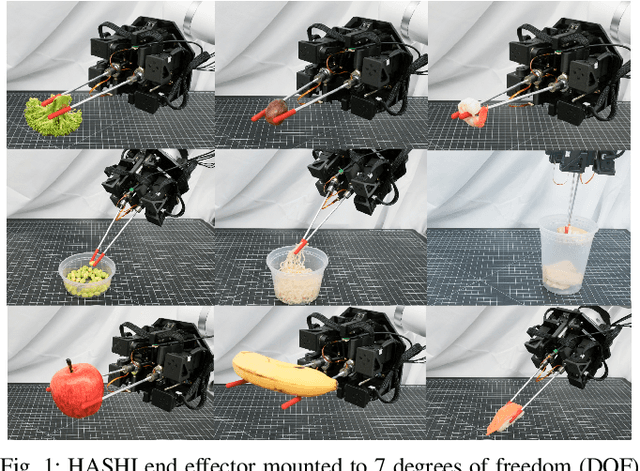

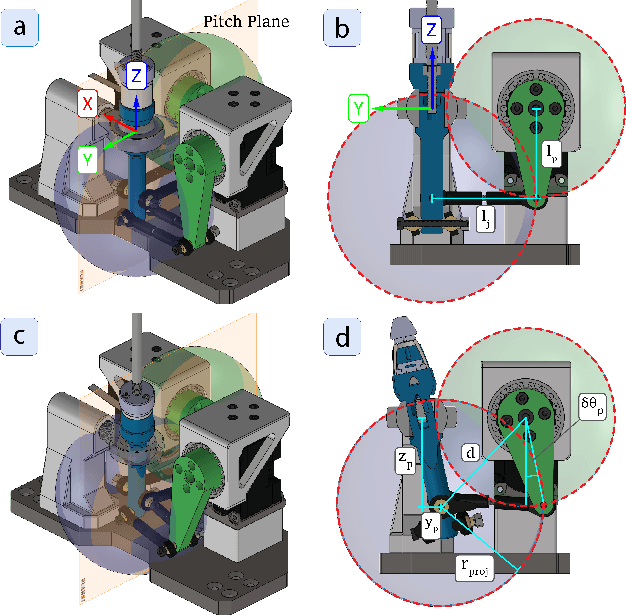

The seafood processing industry provides fertile ground for robotics to impact the future-of-work from multiple perspectives including productivity, worker safety, and quality of work life. The robotics research challenge is the realization of flexible and reliable manipulation of soft, deformable, slippery, spiky and scaly objects. In this paper, we propose a novel robot end effector, called HASHI, that employs chopstick-like appendages for precise and dexterous manipulation. This gripper is capable of in-hand manipulation by rotating its two constituent sticks relative to each other and offers control of objects in all three axes of rotation by imitating human use of chopsticks. HASHI delicately positions and orients food through embedded 6-axis force-torque sensors. We derive and validate the kinematic model for HASHI, as well as demonstrate grip force and torque readings from the sensorization of each chopstick. We also evaluate the versatility of HASHI through grasping trials of a variety of real and simulated food items with varying geometry, weight, and firmness.