 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal cross-validation impacts multivariate time series subsequence anomaly detection evaluation
Jun 13, 2025Evaluating anomaly detection in multivariate time series (MTS) requires careful consideration of temporal dependencies, particularly when detecting subsequence anomalies common in fault detection scenarios. While time series cross-validation (TSCV) techniques aim to preserve temporal ordering during model evaluation, their impact on classifier performance remains underexplored. This study systematically investigates the effect of TSCV strategy on the precision-recall characteristics of classifiers trained to detect fault-like anomalies in MTS datasets. We compare walk-forward (WF) and sliding window (SW) methods across a range of validation partition configurations and classifier types, including shallow learners and deep learning (DL) classifiers. Results show that SW consistently yields higher median AUC-PR scores and reduced fold-to-fold performance variance, particularly for deep architectures sensitive to localized temporal continuity. Furthermore, we find that classifier generalization is sensitive to the number and structure of temporal partitions, with overlapping windows preserving fault signatures more effectively at lower fold counts. A classifier-level stratified analysis reveals that certain algorithms, such as random forests (RF), maintain stable performance across validation schemes, whereas others exhibit marked sensitivity. This study demonstrates that TSCV design in benchmarking anomaly detection models on streaming time series and provide guidance for selecting evaluation strategies in temporally structured learning environments.
KABB: Knowledge-Aware Bayesian Bandits for Dynamic Expert Coordination in Multi-Agent Systems
Feb 11, 2025



As scaling large language models faces prohibitive costs, multi-agent systems emerge as a promising alternative, though challenged by static knowledge assumptions and coordination inefficiencies. We introduces Knowledge-Aware Bayesian Bandits (KABB), a novel framework that enhances multi-agent system coordination through semantic understanding and dynamic adaptation. The framework features three key innovations: a three-dimensional knowledge distance model for deep semantic understanding, a dual-adaptation mechanism for continuous expert optimization, and a knowledge-aware Thompson Sampling strategy for efficient expert selection. Extensive evaluation demonstrates KABB achieves an optimal cost-performance balance, maintaining high performance while keeping computational demands relatively low in multi-agent coordination.
FedPAW: Federated Learning with Personalized Aggregation Weights for Urban Vehicle Speed Prediction
Dec 02, 2024

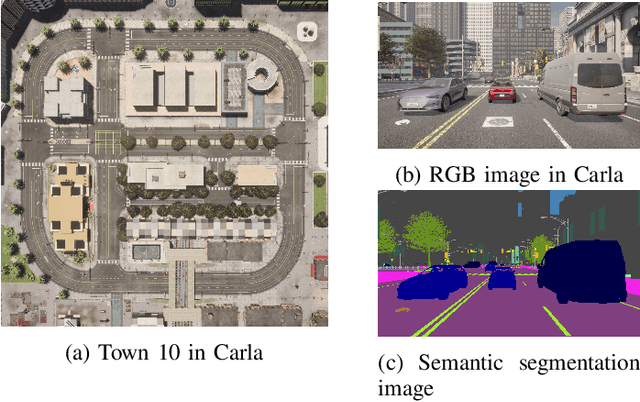

Vehicle speed prediction is crucial for intelligent transportation systems, promoting more reliable autonomous driving by accurately predicting future vehicle conditions. Due to variations in drivers' driving styles and vehicle types, speed predictions for different target vehicles may significantly differ. Existing methods may not realize personalized vehicle speed prediction while protecting drivers' data privacy. We propose a Federated learning framework with Personalized Aggregation Weights (FedPAW) to overcome these challenges. This method captures client-specific information by measuring the weighted mean squared error between the parameters of local models and global models. The server sends tailored aggregated models to clients instead of a single global model, without incurring additional computational and communication overhead for clients. To evaluate the effectiveness of FedPAW, we collected driving data in urban scenarios using the autonomous driving simulator CARLA, employing an LSTM-based Seq2Seq model with a multi-head attention mechanism to predict the future speed of target vehicles. The results demonstrate that our proposed FedPAW ranks lowest in prediction error within the time horizon of 10 seconds, with a 0.8% reduction in test MAE, compared to eleven representative benchmark baselines. The source code of FedPAW and dataset CarlaVSP are open-accessed at: https://github.com/heyuepeng/PFLlibVSP and https://pan.baidu.com/s/1qs8fxUvSPERV3C9i6pfUIw?pwd=tl3e.
Benchmarking Unsupervised Online IDS for Masquerade Attacks in CAN
Jun 19, 2024



Vehicular controller area networks (CANs) are susceptible to masquerade attacks by malicious adversaries. In masquerade attacks, adversaries silence a targeted ID and then send malicious frames with forged content at the expected timing of benign frames. As masquerade attacks could seriously harm vehicle functionality and are the stealthiest attacks to detect in CAN, recent work has devoted attention to compare frameworks for detecting masquerade attacks in CAN. However, most existing works report offline evaluations using CAN logs already collected using simulations that do not comply with domain's real-time constraints. Here we contribute to advance the state of the art by introducing a benchmark study of four different non-deep learning (DL)-based unsupervised online intrusion detection systems (IDS) for masquerade attacks in CAN. Our approach differs from existing benchmarks in that we analyze the effect of controlling streaming data conditions in a sliding window setting. In doing so, we use realistic masquerade attacks being replayed from the ROAD dataset. We show that although benchmarked IDS are not effective at detecting every attack type, the method that relies on detecting changes at the hierarchical structure of clusters of time series produces the best results at the expense of higher computational overhead. We discuss limitations, open challenges, and how the benchmarked methods can be used for practical unsupervised online CAN IDS for masquerade attacks.
Beyond Chain-of-Thought: A Survey of Chain-of-X Paradigms for LLMs
Apr 24, 2024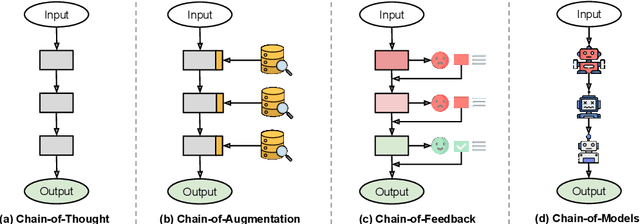

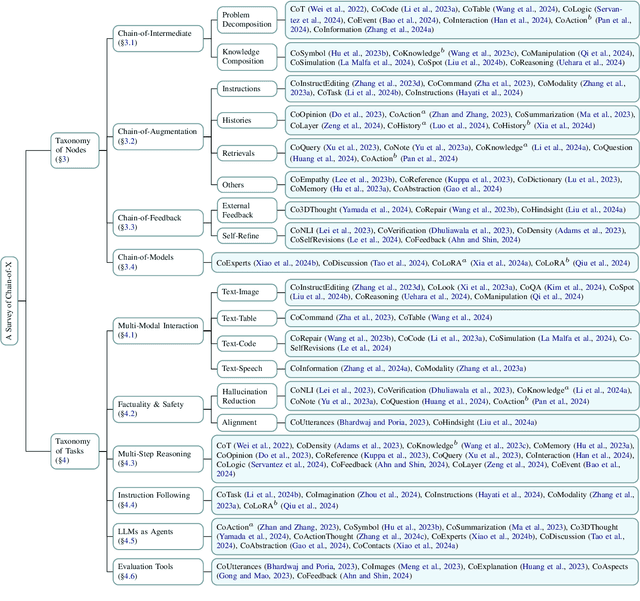
Chain-of-Thought (CoT) has been a widely adopted prompting method, eliciting impressive reasoning abilities of Large Language Models (LLMs). Inspired by the sequential thought structure of CoT, a number of Chain-of-X (CoX) methods have been developed to address various challenges across diverse domains and tasks involving LLMs. In this paper, we provide a comprehensive survey of Chain-of-X methods for LLMs in different contexts. Specifically, we categorize them by taxonomies of nodes, i.e., the X in CoX, and application tasks. We also discuss the findings and implications of existing CoX methods, as well as potential future directions. Our survey aims to serve as a detailed and up-to-date resource for researchers seeking to apply the idea of CoT to broader scenarios.