 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedPAW: Federated Learning with Personalized Aggregation Weights for Urban Vehicle Speed Prediction
Paper and Code


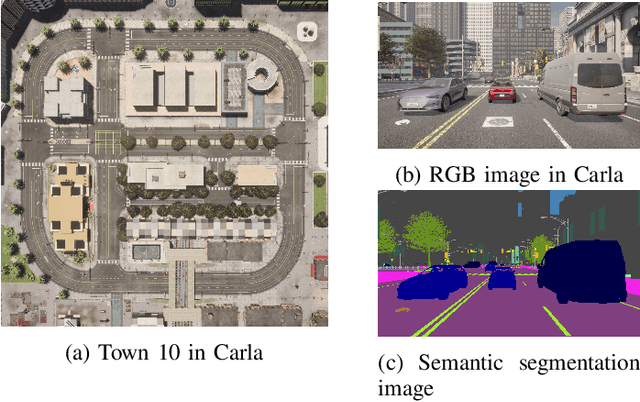

Vehicle speed prediction is crucial for intelligent transportation systems, promoting more reliable autonomous driving by accurately predicting future vehicle conditions. Due to variations in drivers' driving styles and vehicle types, speed predictions for different target vehicles may significantly differ. Existing methods may not realize personalized vehicle speed prediction while protecting drivers' data privacy. We propose a Federated learning framework with Personalized Aggregation Weights (FedPAW) to overcome these challenges. This method captures client-specific information by measuring the weighted mean squared error between the parameters of local models and global models. The server sends tailored aggregated models to clients instead of a single global model, without incurring additional computational and communication overhead for clients. To evaluate the effectiveness of FedPAW, we collected driving data in urban scenarios using the autonomous driving simulator CARLA, employing an LSTM-based Seq2Seq model with a multi-head attention mechanism to predict the future speed of target vehicles. The results demonstrate that our proposed FedPAW ranks lowest in prediction error within the time horizon of 10 seconds, with a 0.8% reduction in test MAE, compared to eleven representative benchmark baselines. The source code of FedPAW and dataset CarlaVSP are open-accessed at: https://github.com/heyuepeng/PFLlibVSP and https://pan.baidu.com/s/1qs8fxUvSPERV3C9i6pfUIw?pwd=tl3e.