 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisAlgae 2023: A Dataset and Challenge for Algae Detection in Microscopy Images
May 27, 2025Microalgae, vital for ecological balance and economic sectors, present challenges in detection due to their diverse sizes and conditions. This paper summarizes the second "Vision Meets Algae" (VisAlgae 2023) Challenge, aiming to enhance high-throughput microalgae cell detection. The challenge, which attracted 369 participating teams, includes a dataset of 1000 images across six classes, featuring microalgae of varying sizes and distinct features. Participants faced tasks such as detecting small targets, handling motion blur, and complex backgrounds. The top 10 methods, outlined here, offer insights into overcoming these challenges and maximizing detection accuracy. This intersection of algae research and computer vision offers promise for ecological understanding and technological advancement. The dataset can be accessed at: https://github.com/juntaoJianggavin/Visalgae2023/.
FedPAW: Federated Learning with Personalized Aggregation Weights for Urban Vehicle Speed Prediction
Dec 02, 2024

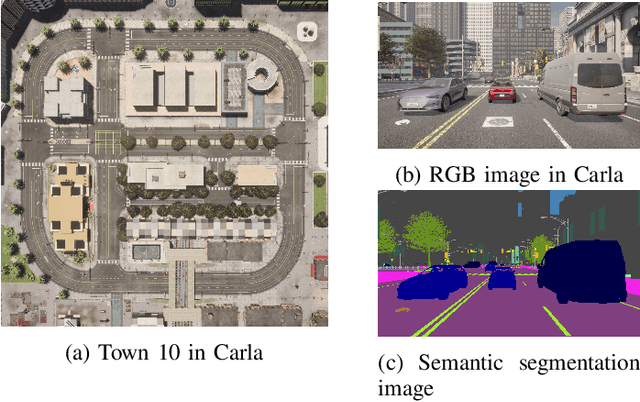

Vehicle speed prediction is crucial for intelligent transportation systems, promoting more reliable autonomous driving by accurately predicting future vehicle conditions. Due to variations in drivers' driving styles and vehicle types, speed predictions for different target vehicles may significantly differ. Existing methods may not realize personalized vehicle speed prediction while protecting drivers' data privacy. We propose a Federated learning framework with Personalized Aggregation Weights (FedPAW) to overcome these challenges. This method captures client-specific information by measuring the weighted mean squared error between the parameters of local models and global models. The server sends tailored aggregated models to clients instead of a single global model, without incurring additional computational and communication overhead for clients. To evaluate the effectiveness of FedPAW, we collected driving data in urban scenarios using the autonomous driving simulator CARLA, employing an LSTM-based Seq2Seq model with a multi-head attention mechanism to predict the future speed of target vehicles. The results demonstrate that our proposed FedPAW ranks lowest in prediction error within the time horizon of 10 seconds, with a 0.8% reduction in test MAE, compared to eleven representative benchmark baselines. The source code of FedPAW and dataset CarlaVSP are open-accessed at: https://github.com/heyuepeng/PFLlibVSP and https://pan.baidu.com/s/1qs8fxUvSPERV3C9i6pfUIw?pwd=tl3e.
FedAH: Aggregated Head for Personalized Federated Learning
Dec 02, 2024



Recently, Federated Learning (FL) has gained popularity for its privacy-preserving and collaborative learning capabilities. Personalized Federated Learning (PFL), building upon FL, aims to address the issue of statistical heterogeneity and achieve personalization. Personalized-head-based PFL is a common and effective PFL method that splits the model into a feature extractor and a head, where the feature extractor is collaboratively trained and shared, while the head is locally trained and not shared. However, retaining the head locally, although achieving personalization, prevents the model from learning global knowledge in the head, thus affecting the performance of the personalized model. To solve this problem, we propose a novel PFL method called Federated Learning with Aggregated Head (FedAH), which initializes the head with an Aggregated Head at each iteration. The key feature of FedAH is to perform element-level aggregation between the local model head and the global model head to introduce global information from the global model head. To evaluate the effectiveness of FedAH, we conduct extensive experiments on five benchmark datasets in the fields of computer vision and natural language processing. FedAH outperforms ten state-of-the-art FL methods in terms of test accuracy by 2.87%. Additionally, FedAH maintains its advantage even in scenarios where some clients drop out unexpectedly. Our code is open-accessed at https://github.com/heyuepeng/FedAH.
FedRAV: Hierarchically Federated Region-Learning for Traffic Object Classification of Autonomous Vehicles
Nov 21, 2024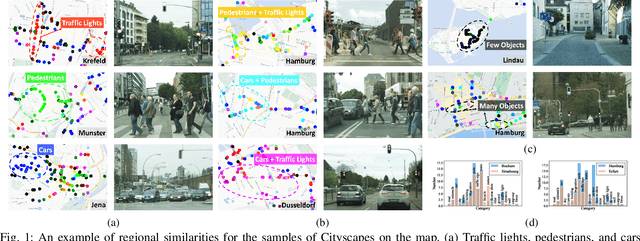
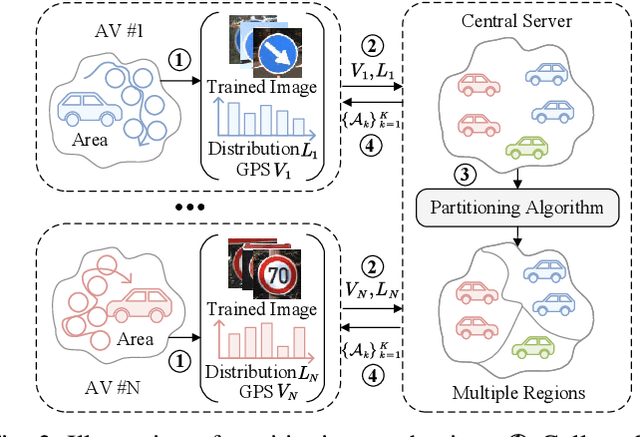
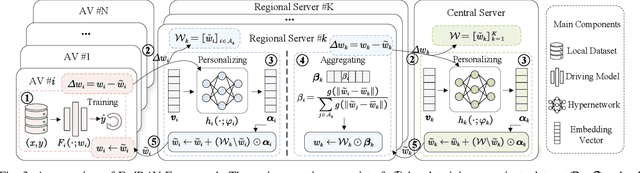

The emerging federated learning enables distributed autonomous vehicles to train equipped deep learning models collaboratively without exposing their raw data, providing great potential for utilizing explosively growing autonomous driving data. However, considering the complicated traffic environments and driving scenarios, deploying federated learning for autonomous vehicles is inevitably challenged by non-independent and identically distributed (Non-IID) data of vehicles, which may lead to failed convergence and low training accuracy. In this paper, we propose a novel hierarchically Federated Region-learning framework of Autonomous Vehicles (FedRAV), a two-stage framework, which adaptively divides a large area containing vehicles into sub-regions based on the defined region-wise distance, and achieves personalized vehicular models and regional models. This approach ensures that the personalized vehicular model adopts the beneficial models while discarding the unprofitable ones. We validate our FedRAV framework against existing federated learning algorithms on three real-world autonomous driving datasets in various heterogeneous settings. The experiment results demonstrate that our framework outperforms those known algorithms, and improves the accuracy by at least 3.69%. The source code of FedRAV is available at: https://github.com/yjzhai-cs/FedRAV.