 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Diff-Attention Aware State Space Fusion Model for Remote Sensing Classification
Apr 23, 2025Multispectral (MS) and panchromatic (PAN) images describe the same land surface, so these images not only have their own advantages, but also have a lot of similar information. In order to separate these similar information and their respective advantages, reduce the feature redundancy in the fusion stage. This paper introduces a diff-attention aware state space fusion model (DAS2F-Model) for multimodal remote sensing image classification. Based on the selective state space model, a cross-modal diff-attention module (CMDA-Module) is designed to extract and separate the common features and their respective dominant features of MS and PAN images. Among this, space preserving visual mamba (SPVM) retains image spatial features and captures local features by optimizing visual mamba's input reasonably. Considering that features in the fusion stage will have large semantic differences after feature separation and simple fusion operations struggle to effectively integrate these significantly different features, an attention-aware linear fusion module (AALF-Module) is proposed. It performs pixel-wise linear fusion by calculating influence coefficients. This mechanism can fuse features with large semantic differences while keeping the feature size unchanged. Empirical evaluations indicate that the presented method achieves better results than alternative approaches. The relevant code can be found at:https://github.com/AVKSKVL/DAS-F-Model
PVUW 2025 Challenge Report: Advances in Pixel-level Understanding of Complex Videos in the Wild
Apr 15, 2025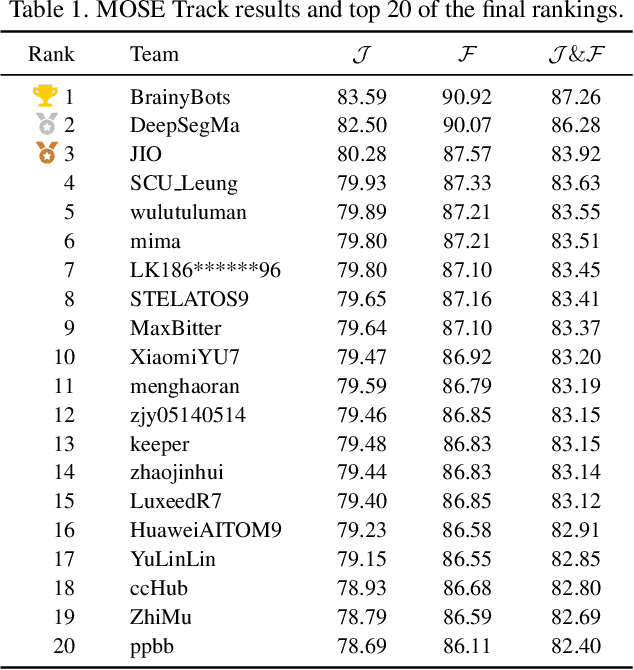
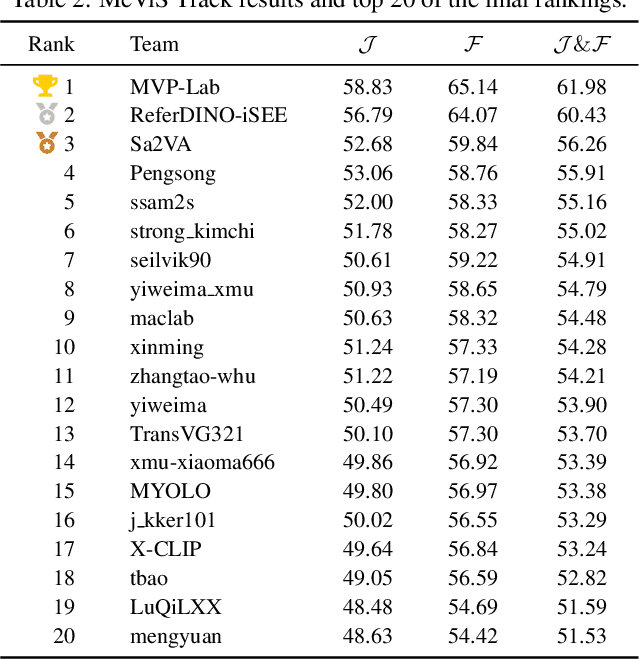
This report provides a comprehensive overview of the 4th Pixel-level Video Understanding in the Wild (PVUW) Challenge, held in conjunction with CVPR 2025. It summarizes the challenge outcomes, participating methodologies, and future research directions. The challenge features two tracks: MOSE, which focuses on complex scene video object segmentation, and MeViS, which targets motion-guided, language-based video segmentation. Both tracks introduce new, more challenging datasets designed to better reflect real-world scenarios. Through detailed evaluation and analysis, the challenge offers valuable insights into the current state-of-the-art and emerging trends in complex video segmentation. More information can be found on the workshop website: https://pvuw.github.io/.
FVOS for MOSE Track of 4th PVUW Challenge: 3rd Place Solution
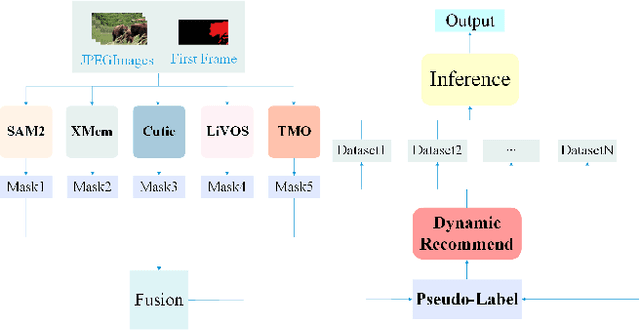
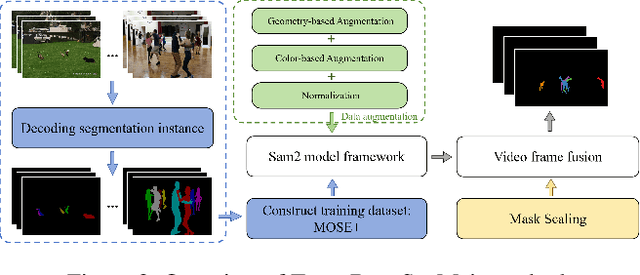
Apr 13, 2025Video Object Segmentation (VOS) is one of the most fundamental and challenging tasks in computer vision and has a wide range of applications. Most existing methods rely on spatiotemporal memory networks to extract frame-level features and have achieved promising results on commonly used datasets. However, these methods often struggle in more complex real-world scenarios. This paper addresses this issue, aiming to achieve accurate segmentation of video objects in challenging scenes. We propose fine-tuning VOS (FVOS), optimizing existing methods for specific datasets through tailored training. Additionally, we introduce a morphological post-processing strategy to address the issue of excessively large gaps between adjacent objects in single-model predictions. Finally, we apply a voting-based fusion method on multi-scale segmentation results to generate the final output. Our approach achieves J&F scores of 76.81% and 83.92% during the validation and testing stages, respectively, securing third place overall in the MOSE Track of the 4th PVUW challenge 2025.
NTIRE 2021 Multi-modal Aerial View Object Classification Challenge
Jul 02, 2021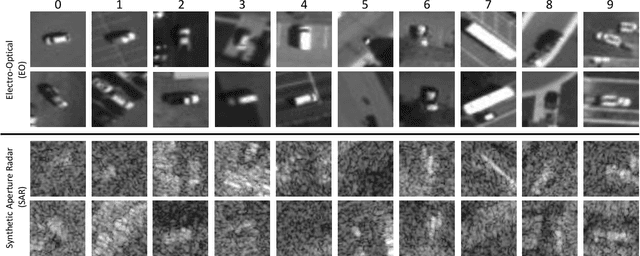
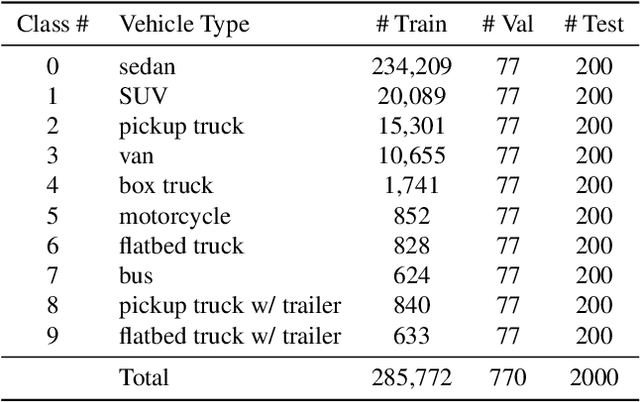
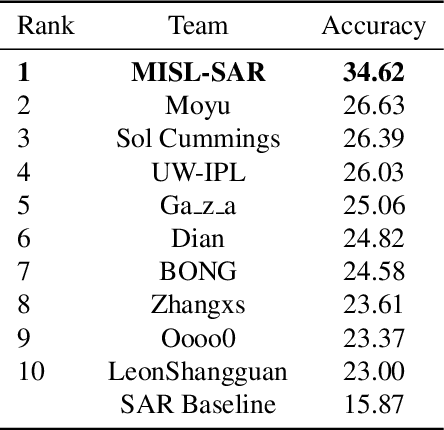
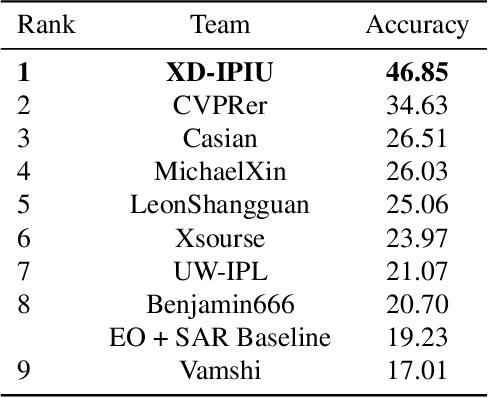
In this paper, we introduce the first Challenge on Multi-modal Aerial View Object Classification (MAVOC) in conjunction with the NTIRE 2021 workshop at CVPR. This challenge is composed of two different tracks using EO andSAR imagery. Both EO and SAR sensors possess different advantages and drawbacks. The purpose of this competition is to analyze how to use both sets of sensory information in complementary ways. We discuss the top methods submitted for this competition and evaluate their results on our blind test set. Our challenge results show significant improvement of more than 15% accuracy from our current baselines for each track of the competition
* 10 pages, 1 figure. Conference on Computer Vision and Pattern Recognition