 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving ASP-based ORS Schedules through Machine Learning Predictions
Jul 22, 2025The Operating Room Scheduling (ORS) problem deals with the optimization of daily operating room surgery schedules. It is a challenging problem subject to many constraints, like to determine the starting time of different surgeries and allocating the required resources, including the availability of beds in different department units. Recently, solutions to this problem based on Answer Set Programming (ASP) have been delivered. Such solutions are overall satisfying but, when applied to real data, they can currently only verify whether the encoding aligns with the actual data and, at most, suggest alternative schedules that could have been computed. As a consequence, it is not currently possible to generate provisional schedules. Furthermore, the resulting schedules are not always robust. In this paper, we integrate inductive and deductive techniques for solving these issues. We first employ machine learning algorithms to predict the surgery duration, from historical data, to compute provisional schedules. Then, we consider the confidence of such predictions as an additional input to our problem and update the encoding correspondingly in order to compute more robust schedules. Results on historical data from the ASL1 Liguria in Italy confirm the viability of our integration. Under consideration in Theory and Practice of Logic Programming (TPLP).
Optimising Dynamic Traffic Distribution for Urban Networks with Answer Set Programming
Aug 14, 2024



Answer Set Programming (ASP) has demonstrated its potential as an effective tool for concisely representing and reasoning about real-world problems. In this paper, we present an application in which ASP has been successfully used in the context of dynamic traffic distribution for urban networks, within a more general framework devised for solving such a real-world problem. In particular, ASP has been employed for the computation of the "optimal" routes for all the vehicles in the network. We also provide an empirical analysis of the performance of the whole framework, and of its part in which ASP is employed, on two European urban areas, which shows the viability of the framework and the contribution ASP can give.
Symbolic Numeric Planning with Patterns
Dec 15, 2023

In this paper, we propose a novel approach for solving linear numeric planning problems, called Symbolic Pattern Planning. Given a planning problem $\Pi$, a bound $n$ and a pattern -- defined as an arbitrary sequence of actions -- we encode the problem of finding a plan for $\Pi$ with bound $n$ as a formula with fewer variables and/or clauses than the state-of-the-art rolled-up and relaxed-relaxed-$\exists$ encodings. More importantly, we prove that for any given bound, it is never the case that the latter two encodings allow finding a valid plan while ours does not. On the experimental side, we consider 6 other planning systems -- including the ones which participated in this year's International Planning Competition (IPC) -- and we show that our planner Patty has remarkably good comparative performances on this year's IPC problems.
CNL2ASP: converting controlled natural language sentences into ASP
Nov 17, 2023



Answer Set Programming (ASP) is a popular declarative programming language for solving hard combinatorial problems. Although ASP has gained widespread acceptance in academic and industrial contexts, there are certain user groups who may find it more advantageous to employ a higher-level language that closely resembles natural language when specifying ASP programs. In this paper, we propose a novel tool, called CNL2ASP, for translating English sentences expressed in a controlled natural language (CNL) form into ASP. In particular, we first provide a definition of the type of sentences allowed by our CNL and their translation as ASP rules, and then exemplify the usage of the CNL for the specification of both synthetic and real-world combinatorial problems. Finally, we report the results of an experimental analysis conducted on the real-world problems to compare the performance of automatically generated encodings with the ones written by ASP practitioners, showing that our tool can obtain satisfactory performance on these benchmarks. Under consideration in Theory and Practice of Logic Programming (TPLP).
On the Configuration of More and Less Expressive Logic Programs
Mar 02, 2022
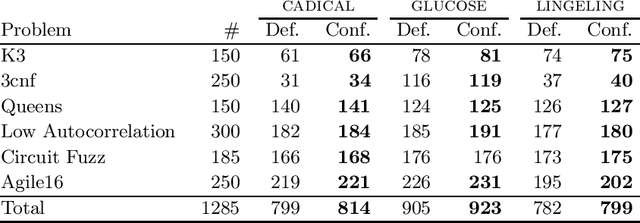
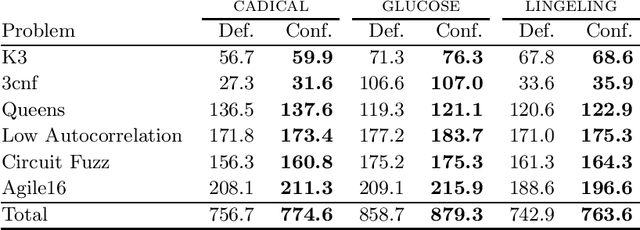
The decoupling between the representation of a certain problem, i.e., its knowledge model, and the reasoning side is one of main strong points of model-based Artificial Intelligence (AI). This allows, e.g. to focus on improving the reasoning side by having advantages on the whole solving process. Further, it is also well-known that many solvers are very sensitive to even syntactic changes in the input. In this paper, we focus on improving the reasoning side by taking advantages of such sensitivity. We consider two well-known model-based AI methodologies, SAT and ASP, define a number of syntactic features that may characterise their inputs, and use automated configuration tools to reformulate the input formula or program. Results of a wide experimental analysis involving SAT and ASP domains, taken from respective competitions, show the different advantages that can be obtained by using input reformulation and configuration. Under consideration in Theory and Practice of Logic Programming (TPLP).
An ASP-based Solution to the Chemotherapy Treatment Scheduling problem
Aug 25, 2021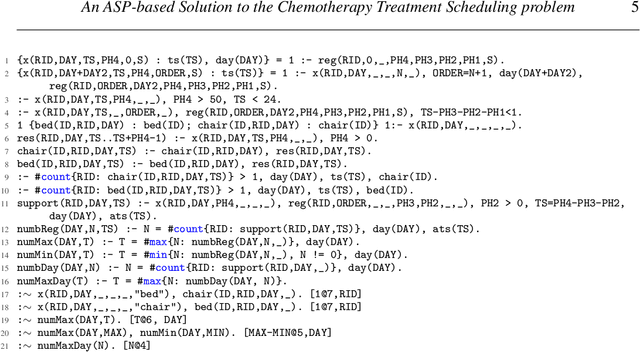
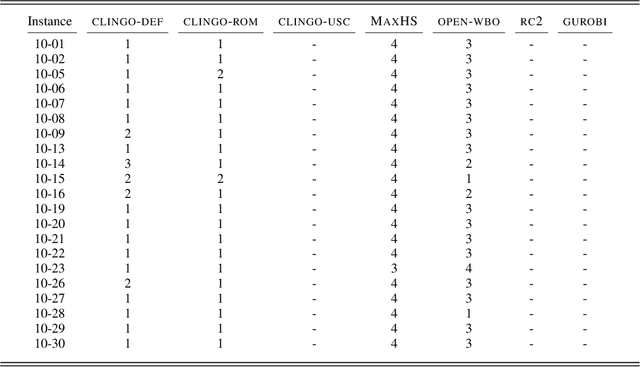
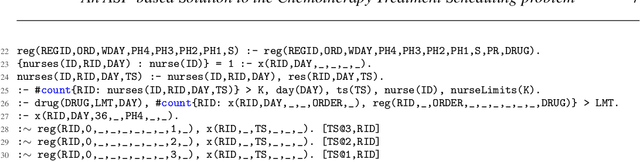
The problem of scheduling chemotherapy treatments in oncology clinics is a complex problem, given that the solution has to satisfy (as much as possible) several requirements such as the cyclic nature of chemotherapy treatment plans, maintaining a constant number of patients, and the availability of resources, e.g., treatment time, nurses, and drugs. At the same time, realizing a satisfying schedule is of upmost importance for obtaining the best health outcomes. In this paper we first consider a specific instance of the problem which is employed in the San Martino Hospital in Genova, Italy, and present a solution to the problem based on Answer Set Programming (ASP). Then, we enrich the problem and the related ASP encoding considering further features often employed in other hospitals, desirable also in S. Martino, and/or considered in related papers. Results of an experimental analysis, conducted on the real data provided by the San Martino Hospital, show that ASP is an effective solving methodology also for this important scheduling problem. Under consideration for acceptance in TPLP.
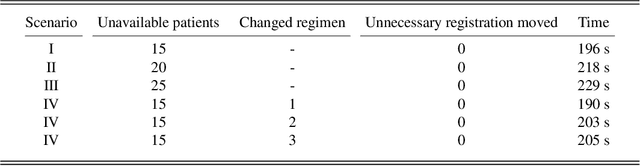
Operating Room (Re)Scheduling with Bed Management via ASP
May 05, 2021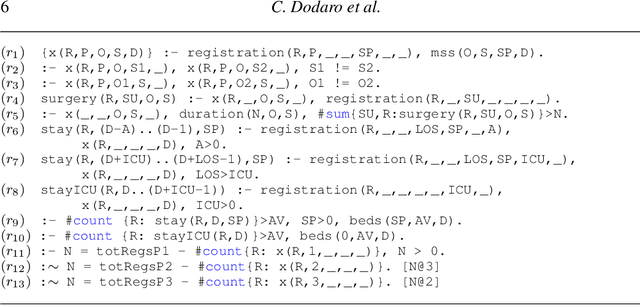
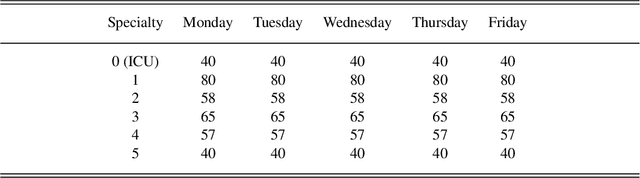
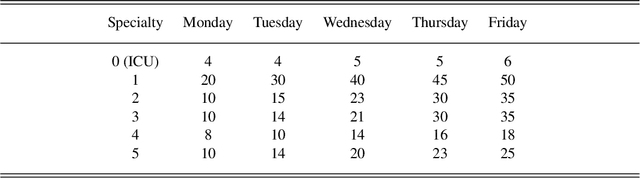
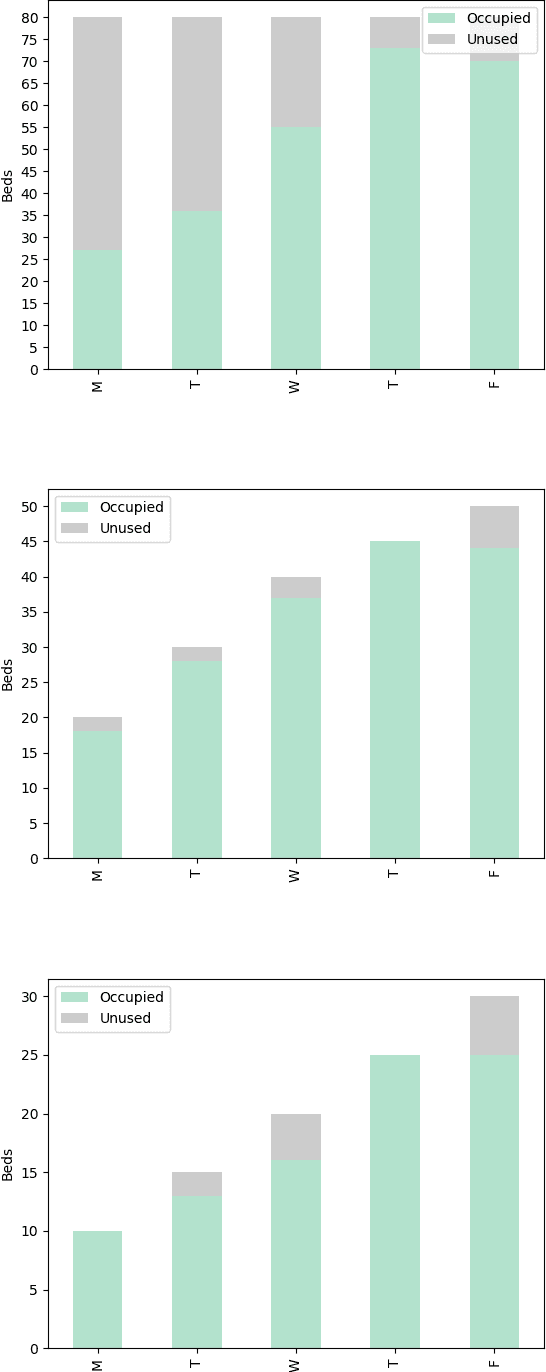
The Operating Room Scheduling (ORS) problem is the task of assigning patients to operating rooms, taking into account different specialties, lengths and priority scores of each planned surgery, operating room session durations, and the availability of beds for the entire length of stay both in the Intensive Care Unit and in the wards. A proper solution to the ORS problem is of primary importance for the healthcare service quality and the satisfaction of patients in hospital environments. In this paper we first present a solution to the problem based on Answer Set Programming (ASP). The solution is tested on benchmarks with realistic sizes and parameters, on three scenarios for the target length on 5-day scheduling, common in small-medium sized hospitals, and results show that ASP is a suitable solving methodology for the ORS problem in such setting. Then, we also performed a scalability analysis on the schedule length up to 15 days, which still shows the suitability of our solution also on longer plan horizons. Moreover, we also present an ASP solution for the rescheduling problem, i.e. when the off-line schedule cannot be completed for some reason. Finally, we introduce a web framework for managing ORS problems via ASP that allows a user to insert the main parameters of the problem, solve a specific instance, and show results graphically in real-time. Under consideration in Theory and Practice of Logic Programming (TPLP).
Collaborative Robotic Manipulation: A Use Case of Articulated Objects in Three-dimensions with Gravity
Nov 13, 2020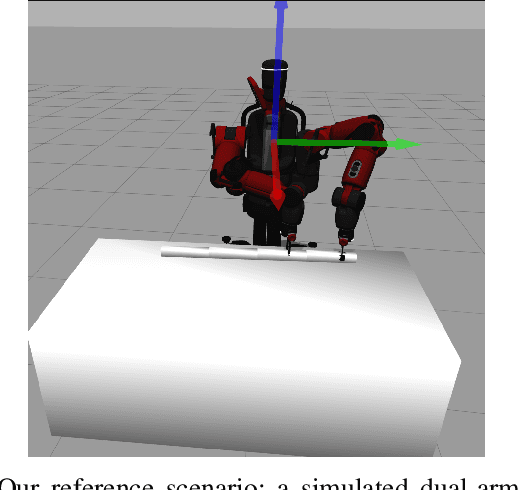
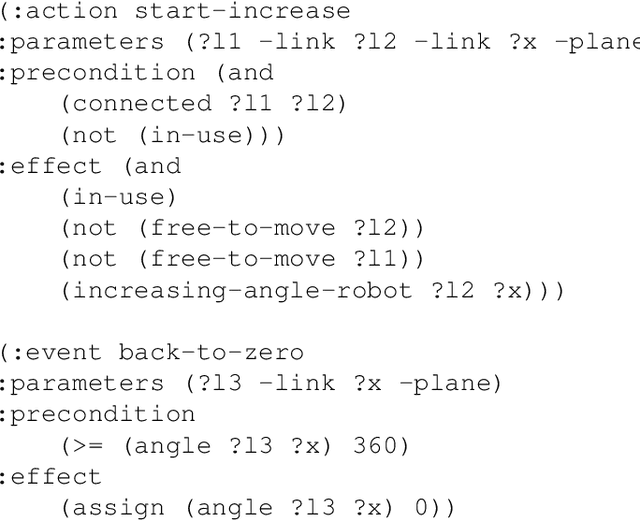
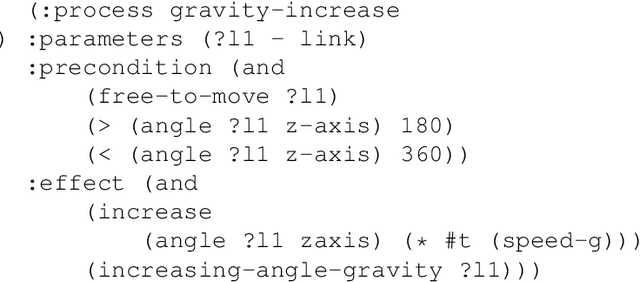
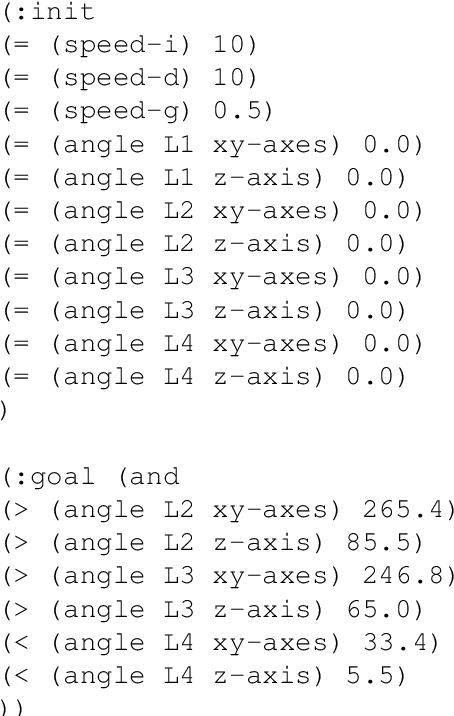
This paper addresses two intertwined needs for collaborative robots operating in shop-floor environments. The first is the ability to perform complex manipulation operations, such as those on articulated or even flexible objects, in a way robust to a high degree of variability in the actions possibly carried out by human operators during collaborative tasks. The second is encoding in such operations a basic knowledge about physical laws (e.g., gravity), and their effects on the models used by the robot to plan its actions, to generate more robust plans. We adopt the manipulation in three-dimensional space of articulated objects as an effective use case to ground both needs, and we use a variant of the Planning Domain Definition Language to integrate the planning process with a notion of gravity. Different complexity levels in modelling gravity are evaluated, which trade-off model faithfulness and performance. A thorough validation of the framework is done in simulation using a dual-arm Baxter manipulator.
Manipulation of Articulated Objects using Dual-arm Robots via Answer Set Programming
Oct 02, 2020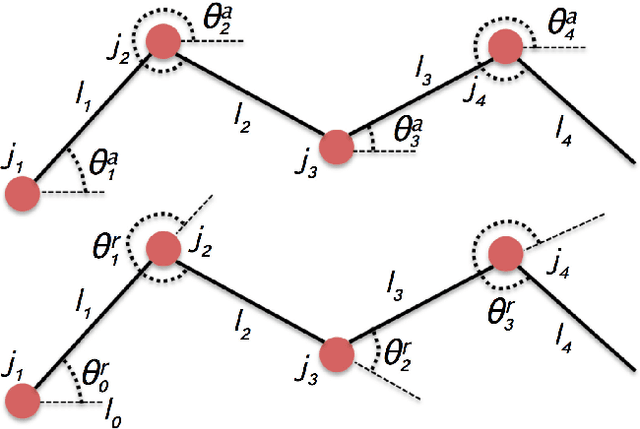
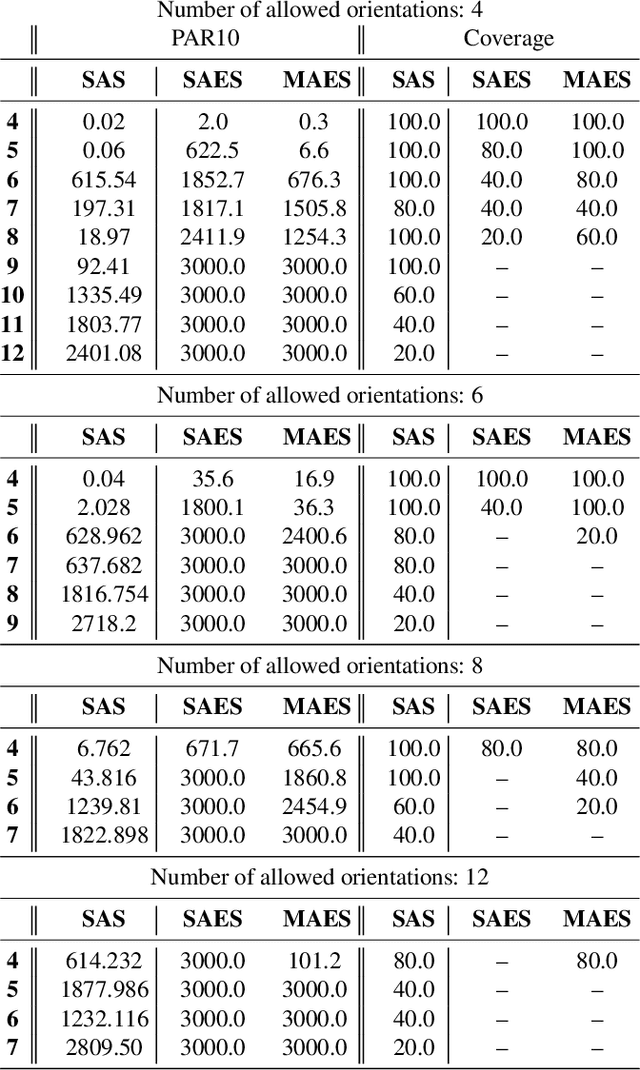
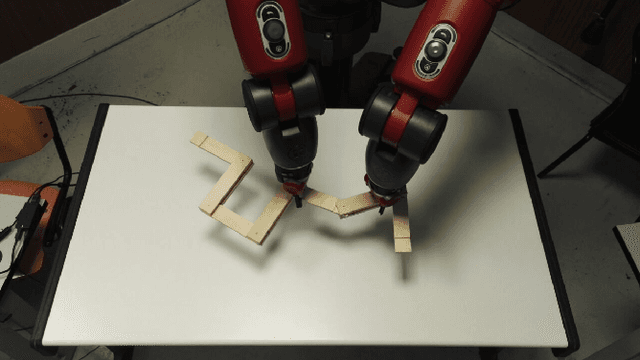
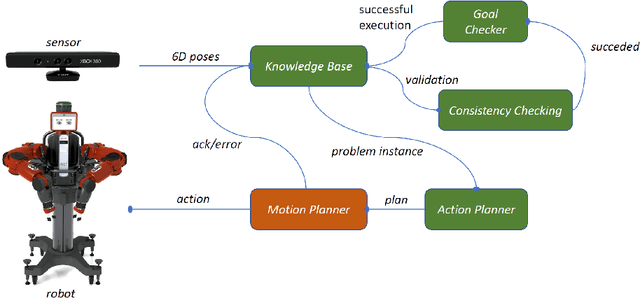
The manipulation of articulated objects is of primary importance in Robotics, and can be considered as one of the most complex manipulation tasks. Traditionally, this problem has been tackled by developing ad-hoc approaches, which lack flexibility and portability. In this paper we present a framework based on Answer Set Programming (ASP) for the automated manipulation of articulated objects in a robot control architecture. In particular, ASP is employed for representing the configuration of the articulated object, for checking the consistency of such representation in the knowledge base, and for generating the sequence of manipulation actions. The framework is exemplified and validated on the Baxter dual-arm manipulator in a first, simple scenario. Then, we extend such scenario to improve the overall setup accuracy, and to introduce a few constraints in robot actions execution to enforce their feasibility. The extended scenario entails a high number of possible actions that can be fruitfully combined together. Therefore, we exploit macro actions from automated planning in order to provide more effective plans. We validate the overall framework in the extended scenario, thereby confirming the applicability of ASP also in more realistic Robotics settings, and showing the usefulness of macro actions for the robot-based manipulation of articulated objects. Under consideration in Theory and Practice of Logic Programming (TPLP).
Proceedings 36th International Conference on Logic Programming (Technical Communications)
Sep 19, 2020Since the first conference held in Marseille in 1982, ICLP has been the premier international event for presenting research in logic programming. Contributions are solicited in all areas of logic programming and related areas, including but not restricted to: - Foundations: Semantics, Formalisms, Answer-Set Programming, Non-monotonic Reasoning, Knowledge Representation. - Declarative Programming: Inference engines, Analysis, Type and mode inference, Partial evaluation, Abstract interpretation, Transformation, Validation, Verification, Debugging, Profiling, Testing, Logic-based domain-specific languages, constraint handling rules. - Related Paradigms and Synergies: Inductive and Co-inductive Logic Programming, Constraint Logic Programming, Interaction with SAT, SMT and CSP solvers, Logic programming techniques for type inference and theorem proving, Argumentation, Probabilistic Logic Programming, Relations to object-oriented and Functional programming, Description logics, Neural-Symbolic Machine Learning, Hybrid Deep Learning and Symbolic Reasoning. - Implementation: Concurrency and distribution, Objects, Coordination, Mobility, Virtual machines, Compilation, Higher Order, Type systems, Modules, Constraint handling rules, Meta-programming, Foreign interfaces, User interfaces. - Applications: Databases, Big Data, Data Integration and Federation, Software Engineering, Natural Language Processing, Web and Semantic Web, Agents, Artificial Intelligence, Bioinformatics, Education, Computational life sciences, Education, Cybersecurity, and Robotics.